






1. 提示词
您好,我是一名高中生,正在YouTube上学习课程“CS 285 at UC Berkeley, Deep Reinforcement Learning”;
此图片是课程视频的截图,请描述其要点
此图片也是课程视频的截图,请描述其要点
讲师在此处表述内容的转写文稿如下:
'''
subtitle
'''
我是来自中国的高中生,请问,这段话是什么意思呀?
询问知识点
您好,我是一名RL专业的研究生,我的理想是成为一名优秀的RL机器人工程师;
请问,“Knowledge”
是专业的RL机器人工程师需要掌握的知识点吗?
您好,我的研究方向是使用LLM自动生成机器人RL算法的奖励函数,请问,
“Knowledge”是我需要掌握的知识点吗?
确认知识点应用
请问,current `sac.py` 中是否显式地使用了如下公式呢
$$\quad \nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \log \pi_\theta\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right) \hat{Q}_{i, t}$$
请问,current `ppo.py` 中是否显式地使用了如下公式呢
$$\quad \nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \log \pi_\theta\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right) \hat{Q}_{i, t}$$
2. 常见术语
2.1 英文术语
Finite horizon:有限时域
Rollout:轨迹采样
- 让智能体(agent)按照当前策略(policy)在环境中完整地执行一个回合(episode)
- 记录下整个交互过程中的状态、动作、奖励等信息
- 这个过程就像"展开"(roll out)一条完整的轨迹(trajectory)
Transition operator:转移算子
在强化学习中的 马尔可夫决策过程 (MDP),状态转移算子是描述系统从一个状态转移到另一个状态的概率规则。
它的数学表示是:
p
(
s
t
+
1
∣
s
t
,
a
t
)
p(s_{t+1} \mid s_t, a_t)
p(st+1∣st,at)
- 含义:给定当前状态 (s_t) 和当前动作 (a_t),系统转移到下一个状态 (s_{t+1}) 的概率;
- 它是由环境(Environment)决定的,与智能体的动作选择 (a_t) 有关。
2.2 英文缩写
| 缩写 | 全称 |
|---|---|
| IS | Importanc Sampling |
2.2 常见希腊字母
ξ \xi ξ: xi(发音请参照有道词典)
2.3 常见符号
2.2.1 ξ ∼ N ( 0 , I ) \xi \sim \mathcal{N}(0, \mathbf{I}) ξ∼N(0,I):随机变量 ξ \xi ξ 服从均值为0、协方差矩阵为单位矩阵的正态分布
2.2.2 p 0 ( x 0 ) p_0(\mathbf{x}_0) p0(x0):样本 x 0 \mathbf{x}_0 x0的概率分布
2.2.3 δ ( c o n d i t i o n ) \delta(condition) δ(condition):指示函数
2.2.3 θ \theta θ:策略网络 π \pi π的可学习参数
2.2.4 π θ ( a ∣ s ) \pi_\theta(\mathbf{a}|\mathbf{s}) πθ(a∣s):状态 s \mathbf{s} s下动作 a \mathbf{a} a的概率分布
这里 π \pi π对应单词“policy”中的“pi”;
2.2.5 轨迹 τ = s 1 , a 1 , … , s T , a T \tau = \mathbf{s}_1, \mathbf{a}_1, \ldots, \mathbf{s}_T, \mathbf{a}_T τ=s1,a1,…,sT,aT
2.2.6 Reward to go Q ^ i , t \hat{Q}_{i,t} Q^i,t
- i i i表示第 i i i条轨迹(trajectory)
3. 课程知识点目录
Lecture 1, Introduction. Part 2
- [What is reintorcement learning?]:介绍基本符号
Lecture 5, Part 2
[What did we just do?]:在REINFORCE算法中计算梯度估计
梯度估计的公式如下:
∇
θ
J
(
θ
)
≈
1
N
∑
i
=
1
N
(
∑
t
=
1
T
∇
θ
log
π
θ
(
a
i
,
t
∣
s
i
,
t
)
)
(
∑
t
=
1
T
r
(
s
i
,
t
,
a
i
,
t
)
)
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^{N} \left( \sum_{t=1}^{T} \nabla_\theta \log \pi_\theta(a_{i,t}|s_{i,t}) \right) \left( \sum_{t=1}^{T} r(s_{i,t}, a_{i,t}) \right)
∇θJ(θ)≈N1i=1∑N(t=1∑T∇θlogπθ(ai,t∣si,t))(t=1∑Tr(si,t,ai,t))
[Review]
- Evaluating the RL objective
- Evaluating the policy gradient
- Log-gradient trick: to remove the terms that we don’t know namely the initial state probability and the transition probability
Lecture 5, Part 3
- [Reducing variance]:如何减少策略梯度估计中的方差,具体来说,可以舍弃past过去的奖励
- [Baselines]:在reward中减去一个常数b
- 同时证明了为什么减去常数b实际上并不会影响策略梯度的值
Lecture 6, Part 1
- [What about the baselines]:advantage function (7:35)
Lecture 6, Part 2
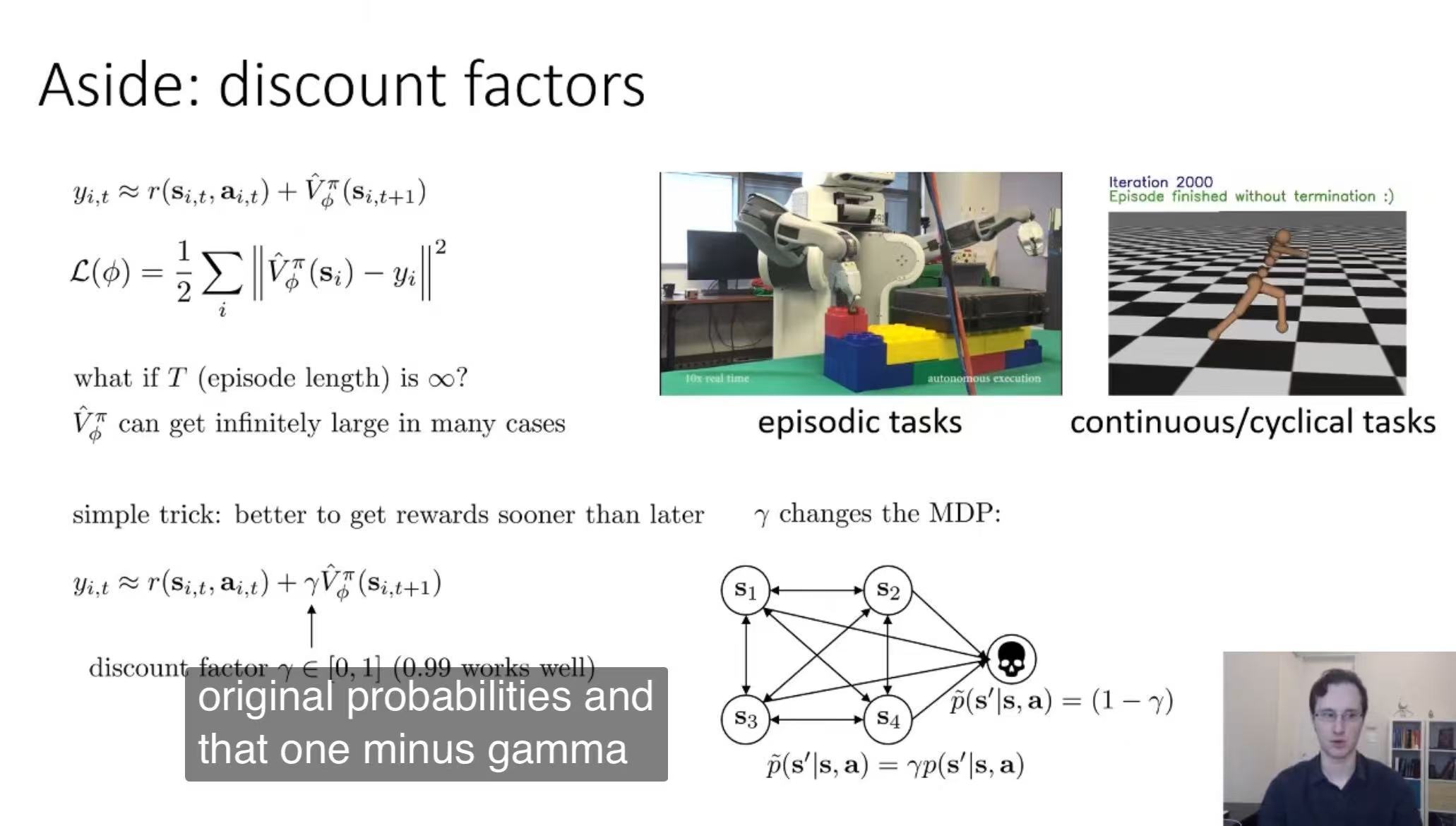
[Aside: discount factors]
Lecture 7, Part 4
Bellman operator
B [ V ] = max a ( r a + γ T a V ) \mathcal{B}[V] = \max_{\mathbf{a}} \left( {\bm{r}}_{\mathbf{a}} + \gamma \mathcal{T}_{\mathbf{a}} V \right) B[V]=amax(ra+γTaV)
- 输入:价值函数 V V V(从状态到数值的映射)。
- 输出:新的价值函数 B [ V ] \mathcal{B}[V] B[V]。
本质: B \mathcal{B} B是对函数 V V V的一种“操作”,将其转换为新的函数。
Contraction of the Bellman operator
∥ B V − B V ˉ ∥ ∞ ≤ γ ∥ V − V ˉ ∥ ∞ \|\mathcal{B}V - \mathcal{B}\bar{V} \|_{\infty} \leq \gamma \| V - \bar{V} \|_{\infty} ∥BV−BVˉ∥∞≤γ∥V−Vˉ∥∞
当 γ < 1 \gamma < 1 γ<1 时,每次迭代后值函数的误差会以 γ \gamma γ的速率缩小,最终收敛到唯一的不动点(即真实值函数)。
CS285:
It’s important to note here that the norm under which the operator b is a contraction is the infinity norm, and the infinity norm is basically the largest difference between the corresponding entries of two functions.
Non-tabular value function learning
Π
\Pi
Π is a projection onto
Ω
\Omega
Ω (in terms of
ℓ
2
\ell_2
ℓ2 norm)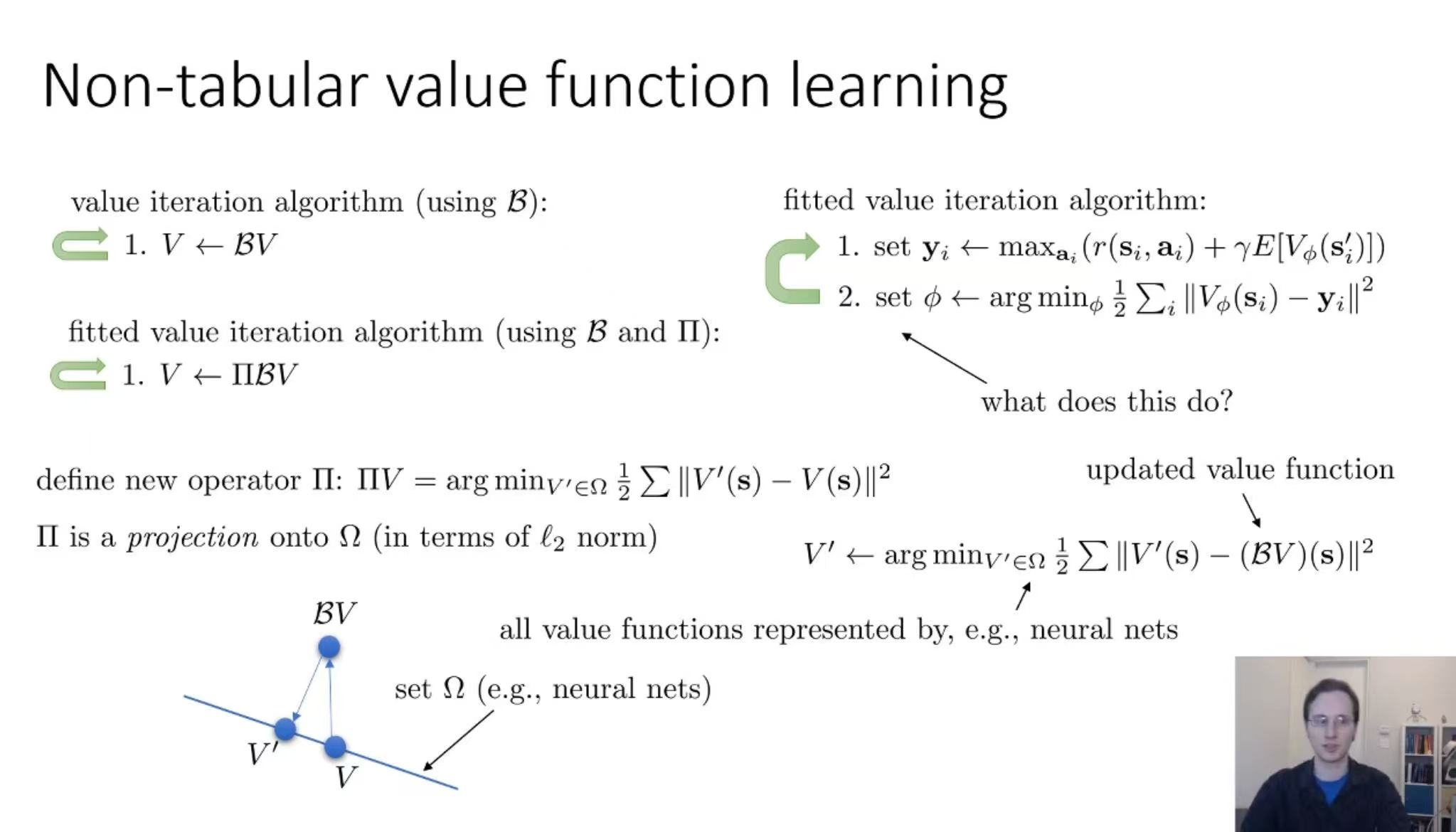
[12:28]: Π B \Pi\mathcal{B} ΠB is not a contraction of any kind
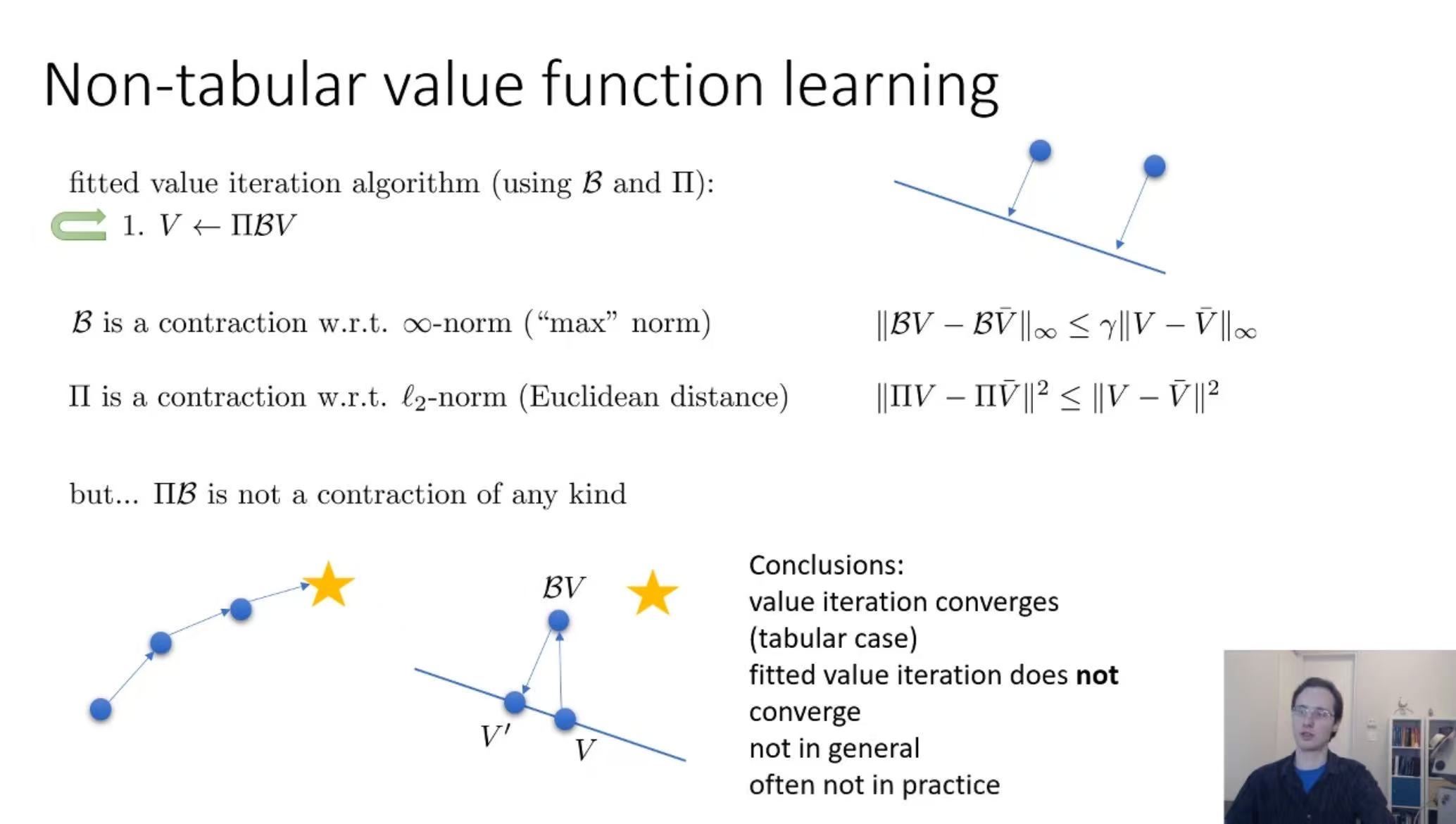
“Fitted Q-Iteration does not converge, too”
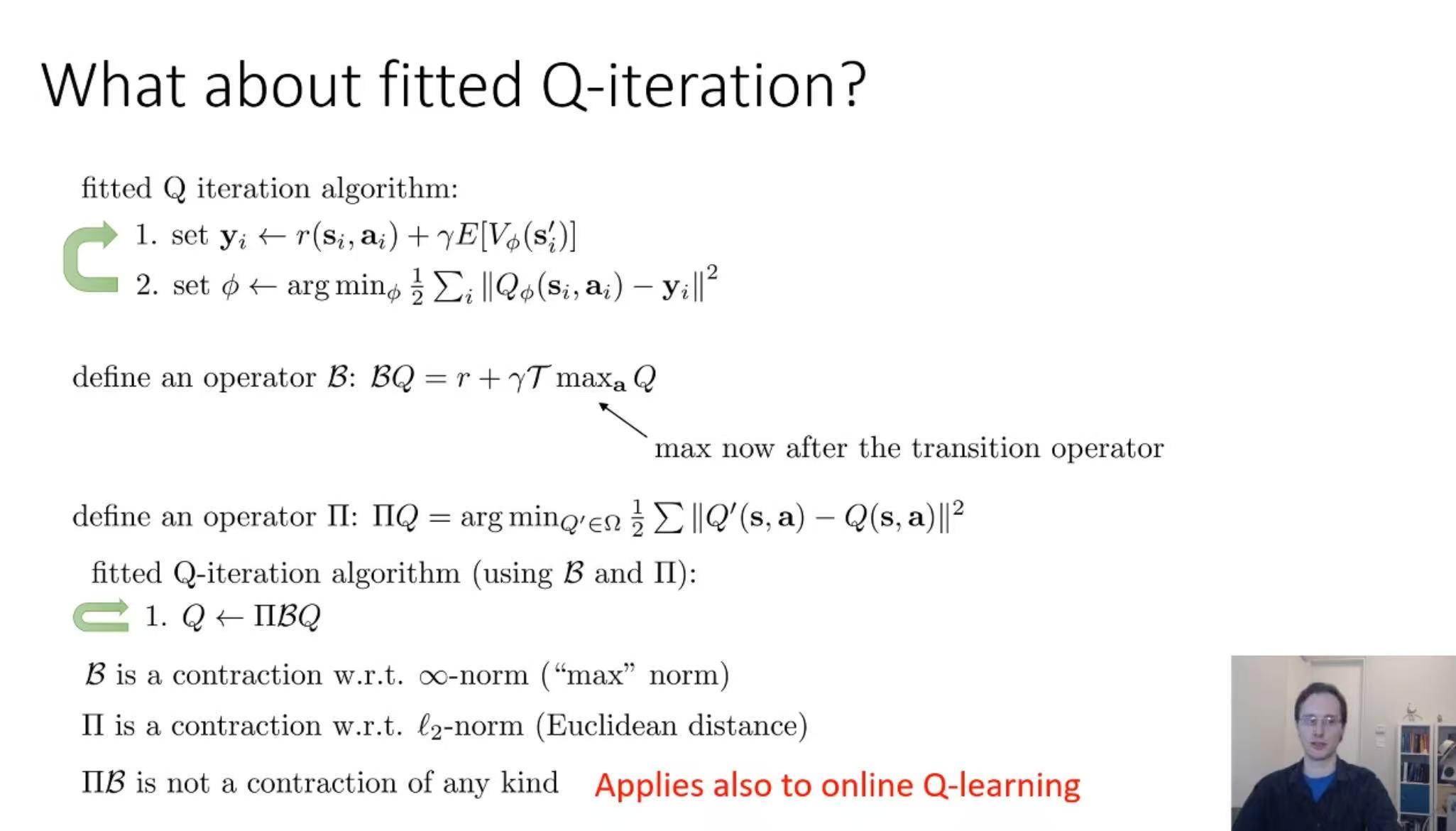
公式中 T \mathcal{T} T的含义
I. T \mathcal{T} T的定义与作用
在强化学习中, T \mathcal{T} T通常表示状态转移期望算子,其作用是对下一状态 s ′ s' s′的期望值进行建模。具体来说:
- 数学表达:
T max a Q \mathcal{T} \max_{\mathbf{a}} Q TmaxaQ的实际含义是: E s ′ ∼ P ( ⋅ ∣ s , a ) [ max a ′ Q ( s ′ , a ′ ) ] \mathbb{E}_{s' \sim P(\cdot | s, a)} \left[ \max_{a'} Q(s', a') \right] Es′∼P(⋅∣s,a)[maxa′Q(s′,a′)]
即,在给定当前状态 s s s和动作 a a a的情况下,计算下一状态 s s s的转移概率分布的期望,并对下一状态的最优Q值( max a ′ Q ( s ′ , a ′ ) \max_{a'} Q(s', a') maxa′Q(s′,a′))取期望。 - 简化理解:
T \mathcal{T} T封装了环境动态的随机性(例如状态转移的概率分布),将理论上的最大值( max Q \max Q maxQ)与实际环境转移的期望结合起来。
II. 与贝尔曼算子 B \mathcal{B} B的关系
公式 B Q = r + γ T max a Q \mathcal{B} Q = r + \gamma \mathcal{T} \max_{\mathbf{a}} Q BQ=r+γTmaxaQ中:
- B \mathcal{B} B 是贝尔曼算子,负责将当前Q函数映射到下一迭代的Q函数。
- T \mathcal{T} T 是贝尔曼算子的核心组成部分,用于整合环境动态的影响。
- 整体流程:
贝尔曼更新首先计算即时奖励 r r r,然后加上折扣后的未来期望价值 γ T max Q \gamma \mathcal{T}\max Q γTmaxQ,最终得到新的Q值。
III. 为什么需要 T \mathcal{T} T这一算子?
- 环境动态建模:在真实环境中,状态转移通常具有随机性(例如机器人动作可能受噪声影响)。(\mathcal{T}) 通过期望操作((\mathbb{E}))将这些随机性纳入价值函数的更新中。
- 数学形式化:使用算子表示可以让算法推导更简洁,同时明确区分不同操作(如奖励、折扣、状态转移)的作用。
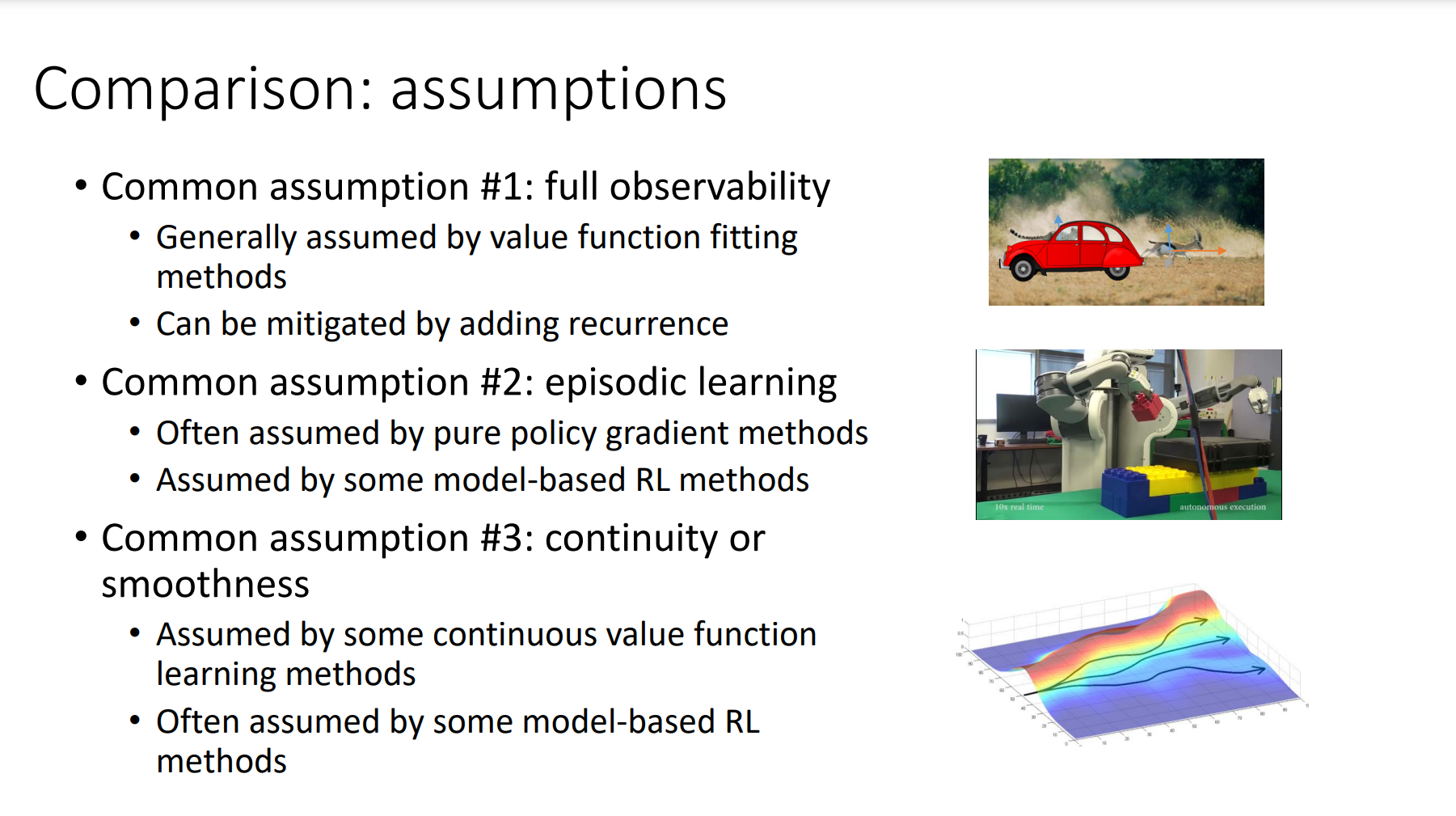
4. RL算法的常见假设
5. 概率论引入知识
5.1 全期望公式
E [ X ] = E [ E [ X ∣ Y ] ] E[X] = E[E[X \mid Y]] E[X]=E[E[X∣Y]]
5.1.1 条件概率的等效形式
E X [ X ] = E Y [ E X ∼ p ( X ∣ Y ) [ X ∣ Y ] ] E_{X}[X] = E_{Y}[E_{X\sim p(X \mid Y)}[X \mid Y]] EX[X]=EY[EX∼p(X∣Y)[X∣Y]]
可以方便我们对轨迹期望进行迭代分解;
5.2 Total Variation Divergence,总变化散度
对于离散分布:
TV
(
P
,
Q
)
=
1
2
∑
∣
P
(
x
)
−
Q
(
x
)
∣
\text{TV}(P,Q) = \frac{1}{2} \sum|P(x) - Q(x)|
TV(P,Q)=21∑∣P(x)−Q(x)∣
对于连续分布:
TV
(
P
,
Q
)
=
1
2
∫
∣
p
(
x
)
−
q
(
x
)
∣
d
x
\text{TV}(P,Q) = \frac{1}{2} \int|p(x) - q(x)|dx
TV(P,Q)=21∫∣p(x)−q(x)∣dx
6. 信息几何引入知识
6.1 Fisher信息矩阵
F = E [ ∇ θ log f θ ( X ) ∇ θ log f θ ( X ) T ] \mathbf{F} = \mathbb{E}\left[ \nabla_\theta \log f_\theta(X) \nabla_\theta \log f_\theta(X)^T \right] F=E[∇θlogfθ(X)∇θlogfθ(X)T]
7. 常用公式
7.1 轨迹概率公式:基于链式法则和马尔可夫性对轨迹概率的分解
p θ ( s 1 , a 1 , … , s T , a T ) = p ( s 1 ) ∏ t = 1 T π θ ( a t ∣ s t ) p ( s t + 1 ∣ s t , a t ) p_\theta\left(\mathbf{s}_1, \mathbf{a}_1, \ldots, \mathbf{s}_T, \mathbf{a}_T\right)=p\left(\mathbf{s}_1\right) \prod_{t=1}^T \pi_\theta\left(\mathbf{a}_t \mid \mathbf{s}_t\right) p\left(\mathbf{s}_{t+1} \mid \mathbf{s}_t, \mathbf{a}_t\right) pθ(s1,a1,…,sT,aT)=p(s1)t=1∏Tπθ(at∣st)p(st+1∣st,at)
海螺AI:也可以描述为
P ( τ ) = P ( s 1 ) ⋅ P ( a 1 ∣ s 1 ) ⋅ P ( s 2 ∣ s 1 , a 1 ) ⋅ P ( a 2 ∣ s 2 ) ⋅ ⋯ ⋅ P ( s T ∣ s T − 1 , a T − 1 ) ⋅ P ( a T ∣ s T ) P(\tau) = P(s_1) \cdot P(a_1 | s_1) \cdot P(s_2 | s_1, a_1) \cdot P(a_2 | s_2) \cdot \dots \cdot P(s_T | s_{T-1}, a_{T-1}) \cdot P(a_T | s_T) P(τ)=P(s1)⋅P(a1∣s1)⋅P(s2∣s1,a1)⋅P(a2∣s2)⋅⋯⋅P(sT∣sT−1,aT−1)⋅P(aT∣sT);
南溪:这样看起来会更容易理解一些;
6.2 计算轨迹的期望目标
E τ ∼ p θ ( τ ) [ ∑ t = 1 T r ( s t , a t ) ] = ∑ τ p θ ( τ ) ( ∑ t = 1 T r ( s t , a t ) ) E_{\tau \sim p_\theta(\tau)}\left[\sum_{t=1}^T r\left(\mathbf{s}_t, \mathbf{a}_t\right)\right] = \sum_{\tau} p_\theta(\tau) \left( \sum_{t=1}^T r\left(\mathbf{s}_t, \mathbf{a}_t\right) \right) Eτ∼pθ(τ)[t=1∑Tr(st,at)]=τ∑pθ(τ)(t=1∑Tr(st,at))
6.3 边缘化性质(Marginalization Property)
对于两个随机变量
X
X
X和
X
X
X,以及函数
f
(
X
)
f(X)
f(X),如果我们想计算
f
(
X
)
f(X)
f(X)的期望值,那么无论是基于联合分布
(
X
,
Y
)
(X, Y)
(X,Y)还是仅基于
X
X
X的边缘分布,结果都是相同的。也就是说:
E
(
X
,
Y
)
[
f
(
X
)
]
=
E
X
[
f
(
X
)
]
E_{(X,Y)}[f(X)] = E_X[f(X)]
E(X,Y)[f(X)]=EX[f(X)]
Note:在公式证明时用于化简。
6.4 优化目标公式:最大化期望累积奖励
θ ⋆ = arg max θ E τ ∼ p θ ( τ ) [ ∑ t r ( s t , a t ) ] \theta^{\star}=\arg \max _\theta E_{\tau \sim p_\theta(\tau)}\left[\sum_t r\left(\mathbf{s}_t, \mathbf{a}_t\right)\right] θ⋆=argθmaxEτ∼pθ(τ)[t∑r(st,at)]
3.2.1 Finite horizon case
θ ⋆ = arg max θ E τ ∼ p θ ( τ ) [ ∑ t r ( s t , a t ) ] = arg max θ ∑ t = 1 T E ( s t , a t ) ∼ p θ ( s t , a t ) [ r ( s t , a t ) ] \begin{aligned} \theta^{\star} & =\arg \max _\theta E_{\tau \sim p_\theta(\tau)}\left[\sum_t r\left(\mathbf{s}_t, \mathbf{a}_t\right)\right] \\ & =\arg \max _\theta \sum_{t=1}^T E_{\left(\mathbf{s}_t, \mathbf{a}_t\right) \sim p_\theta\left(\mathbf{s}_t, \mathbf{a}_t\right)}\left[r\left(\mathbf{s}_t, \mathbf{a}_t\right)\right] \end{aligned} θ⋆=argθmaxEτ∼pθ(τ)[t∑r(st,at)]=argθmaxt=1∑TE(st,at)∼pθ(st,at)[r(st,at)]
RAIL:可以直接使用 linearity of expectation 来交换 ∑ \sum ∑和 E E E符号的位置。
南溪:这里的推导没有用到 Markov property.
Proof
Step 1: Expand the Expected Total Reward
E
τ
∼
p
θ
(
τ
)
[
∑
t
=
1
T
r
(
s
t
,
a
t
)
]
=
∑
τ
p
θ
(
τ
)
∑
t
=
1
T
r
(
s
t
,
a
t
)
E_{\tau \sim p_\theta(\tau)}\left[\sum_{t=1}^T r(\mathbf{s}_t, \mathbf{a}_t)\right] = \sum_{\tau} p_\theta(\tau) \sum_{t=1}^T r(\mathbf{s}_t, \mathbf{a}_t)
Eτ∼pθ(τ)[t=1∑Tr(st,at)]=τ∑pθ(τ)t=1∑Tr(st,at)
Step 2: Swap the Order of Summations
We can interchange the order of summations because summation is a linear operator:
∑
τ
p
θ
(
τ
)
∑
t
=
1
T
r
(
s
t
,
a
t
)
=
∑
t
=
1
T
∑
τ
p
θ
(
τ
)
r
(
s
t
,
a
t
)
\sum_{\tau} p_\theta(\tau) \sum_{t=1}^T r(\mathbf{s}_t, \mathbf{a}_t) = \sum_{t=1}^T \sum_{\tau} p_\theta(\tau) r(\mathbf{s}_t, \mathbf{a}_t)
τ∑pθ(τ)t=1∑Tr(st,at)=t=1∑Tτ∑pθ(τ)r(st,at)
Step 3: Recognize Marginal Distributions
∑
τ
p
θ
(
τ
)
r
(
s
t
,
a
t
)
=
E
τ
∼
p
θ
(
τ
)
[
r
(
s
t
,
a
t
)
]
=
E
(
s
t
,
a
t
)
∼
p
θ
(
s
t
,
a
t
)
[
r
(
s
t
,
a
t
)
]
\begin{aligned} \sum_{\tau} p_\theta(\tau) r(\mathbf{s}_t, \mathbf{a}_t) &= E_{\tau \sim p_\theta(\tau)}\left[r(\mathbf{s}_t, \mathbf{a}_t)\right] \\ &= E_{(\mathbf{s}_t, \mathbf{a}_t) \sim p_\theta(\mathbf{s}_t, \mathbf{a}_t)}\left[r(\mathbf{s}_t, \mathbf{a}_t)\right] \end{aligned}
τ∑pθ(τ)r(st,at)=Eτ∼pθ(τ)[r(st,at)]=E(st,at)∼pθ(st,at)[r(st,at)]
这里的推导我们使用了边缘化性质。
6.5 A convenient identity
p θ ( τ ) ∇ θ log p θ ( τ ) = ∇ θ p θ ( τ ) p_\theta(\tau)\nabla_\theta\log p_\theta(\tau)=\nabla_\theta p_\theta(\tau) pθ(τ)∇θlogpθ(τ)=∇θpθ(τ)
6.6 Log Probability of Gaussian Policy(高斯策略的对数概率)
log
π
θ
(
a
t
∣
s
t
)
=
−
1
2
∥
f
(
s
t
)
−
a
t
∥
Σ
2
+
const
\log \pi_{\theta}(\mathbf{a}_t | \mathbf{s}_t) = -\frac{1}{2} \left\| f(\mathbf{s}_t) - \mathbf{a}_t \right\|_{\Sigma}^2 + \text{const}
logπθ(at∣st)=−21∥f(st)−at∥Σ2+const
相关推导说明请参考博客;
6.7 Causal On-Policy Policy Gradient(因果性在线策略梯度)
∇ θ J ( θ ) ≈ 1 N ∑ i = 1 N ∑ t = 1 T ∇ θ log π θ ( a i , t ∣ s i , t ) Q ^ i , t \quad \nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=1}^T \nabla_\theta \log \pi_\theta\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right) \hat{Q}_{i, t} ∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)Q^i,t
- Q ^ i , t \hat{Q}_{i,t} Q^i,t:动作价值函数 ( Q(s,a) ) 的估计值。
6.8 Natural Policy Gradient(自然策略梯度)
自然策略梯度的参数更新公式如下:
θ
←
θ
+
α
F
−
1
∇
θ
J
(
θ
)
\theta \leftarrow \theta+\alpha \mathbf{F}^{-1} \nabla_\theta J(\theta)
θ←θ+αF−1∇θJ(θ)
其中,
- α \alpha α表示学习率
- F = E π θ [ ∇ θ log π θ ( a ∣ s ) ∇ θ log π θ ( a ∣ s ) T ] \mathbf{F}=E_{\pi_\theta}\left[\nabla_\theta \log \pi_\theta(\mathbf{a} \mid \mathbf{s}) \nabla_\theta \log \pi_\theta(\mathbf{a} \mid \mathbf{s})^T\right] F=Eπθ[∇θlogπθ(a∣s)∇θlogπθ(a∣s)T]
6.8.1 为什么“NPG听上去似乎很有道理”,但是在常见的RL算法库中并没有看到有算法实际使用NPG呢?(from Claude-3.7-Sonnet-Reasoning-Poe)
(1)计算成本高昂
- Fisher信息矩阵计算复杂:对于现代深度神经网络(可能有数百万参数),计算和存储完整的Fisher矩阵几乎不可行;
- 需要矩阵求逆:自然梯度需要计算Fisher矩阵的逆,这对大型网络来说计算复杂度为O(n³),极其昂贵;
(2)更实用的替代方案已经出现
- TRPO (Trust Region Policy Optimization):保留了自然梯度的核心思想(约束策略更新),但使用了更有效的计算方法;
- PPO (Proximal Policy Optimization):进一步简化了TRPO,通过目标函数裁剪实现类似效果,更容易实现;
- 这些算法在实践中表现良好,同时计算效率更高;
(3)现代优化器的改进
- Adam等自适应优化器在某种程度上缓解了不同参数敏感度不同的问题;
- 结合经验性技巧,这些更简单的方法通常已经足够好。

















 1065
1065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









