







#include<Stepper.h>
#define KEY 2 //定义 key_1 I/O number is 2
// 参考文件
/*
28BYJ-48.pdf
该参数根据电机每一转的步数来修改
*/
const int stepsPerRevolution = 256;
const int stepsDelay = 10000;
int stepin=0;
int count=1;
/*
steps=5.68888 旋转1度
steps=170.666 旋转30度
steps=256 旋转45度
steps=341.333 旋转60度
steps=512 旋转90度
steps=1024 旋转180度
steps=2048 旋转360度
*/
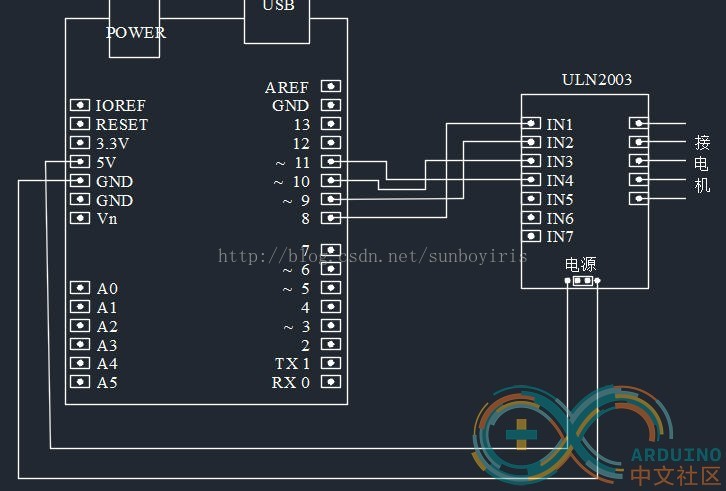
// 初始化步进电机要使用的Arduino的引脚编号
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup()
{
// 设置转速,单位r/min
myStepper.setSpeed(20);
// 初始化串口
Serial.begin(9600);
}
void clockwise()
{
// 顺时针一次旋转
Serial.println("clockwise");
mySte 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2263
2263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









