







倍福NC轴编码器Enc parameters释义
在应用倍福调试驱动器时,如果不是搭配倍福的AX系列驱动器,使用第三方驱动器的话,通常需要设置轴的参数和轴反馈编码器的参数,在实际应用时,一般以总线型伺服居多,例如第三方驱动器多以EtherCAT驱动器和CANopen驱动器为主,这里简要介绍几个关键的参数设置方法和设置的来由,以期帮助工程师们快速上手NC进行调试。
编码器参数设置

Invert EncoderCounting Direction:此参数用来决定NC对编码器的计数方向是否取反
默认是设置为FALSE的,即不对编码器计数方向取反,同时这个参数也需要注意和轴的运动方向保持一致,也就是说如果这里设为FALSE,Drive下的相应参数也应设为FALSE,如下图所示。

在实际应用中可能会存在这样的情况:
1、机械装配已经完成,但是发现这两个参数都为FALSE的时候,轴的运动方向并不是你想要的正方向(工艺正方向),此时这两个参数可以都取为TRUE。
需要特别注意的一点是,不能把这两个参数一个设为TRUE,一个设为FALSE,这样的设置会导致轴出现意外运动,例如飞车。

Scaling Factor Numerator:中文含义为“标度因子分子项”也可译为“比例系数分子项”
Scaling Factor Denominator:中文含义为“标度因子分母项”也可译为“比例系数分母项”
这两个参数配合使用用来进行单位换算,用来把实际编码器反馈值的增量换算成NC中显示的位置值增量,通常把Scaling Factor Denominator设置为电机转动一圈时编码器的反馈上来的脉冲值,Scaling Factor Numerator设置为电机转动一圈时所对应的工件位移量(注意这个参数的单位是mm/INC,即每个脉冲值对应的位移量)。
分两种情况来举例说明
1、工件是直线运动,电机经过减速机带动工件运动,若电机转动一圈工件的位移量为5mm,电机转动一圈编码器的反馈脉冲值为20000,则
Scaling Factor Numerator=5
Scaling Factor Denominator=20000
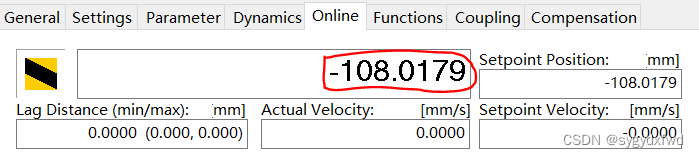
这样,在NC中调试时,如下图所示这个位置显示的值就是实际工件的位移量,这样工程师看起来就很直观,不必再通过编码器的原始数据去换算实际位移量。
2、工件是旋转运动,电机经过减速机带动工件旋转,若电机转动一圈工件旋转30°,此时编码器的反馈脉冲值为20000,则
Scaling Factor Numerator=30
Scaling Factor Denominator=20000
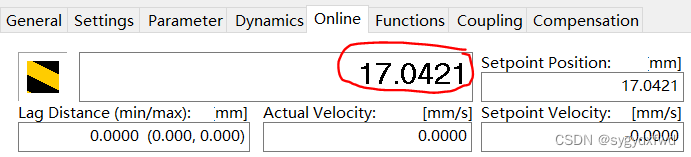
这样设置以后,我们在Online界面看到的下图就是实际工件的旋转角度,注意这个值是旋转角度,虽然它显示的单位是mm(其实这里是可以调整显示成角度的,请看文末设置方法)
Encoder Mask(maximum encoder value):此参数用来表示编码器在发生溢出前的最大反馈值,例如对于多圈绝对值编码器,假定其单圈分辨率为17位,多圈12位,即总脉冲数为:217*212=2^29=536870912,转换成16进制数值0x20000000,此时的Encoder Mask=0x20000000-1=0x1FFFFFFF;
Encoder Sub Mask(absolute range maximum value):此参数表示电机每转对应的编码器脉冲数,即单圈分辨率,沿用上述多圈绝对值编码器,则这个数就是2^17=131072,换算成16进制就是0x20000;即Encoder Sub Mask=0x20000-1=0x1FFFF;
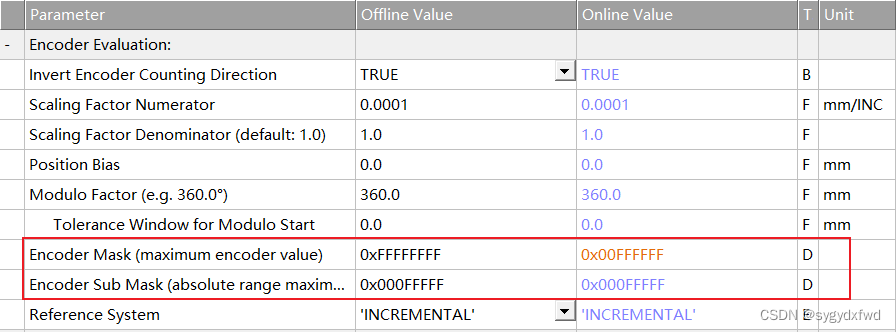
对于增量型编码器而言,其参数我们只关注编码器的分辨率(PPR参数),即电机每转编码器的输出脉冲数,理论上讲,增量编码器的计数值是无限的,只要电机沿着一个方向一直转,那么编码器的计数值就会一直增加,Encoder Mask就没有办法设置,但是TwinCAT NC中Encoder Mask允许的最大计数值是2^32,即4,294,967,296。大约42亿个值,这个值其实非常非常大,就实际应用而言,通常不会超过这个数(即使超过了,NC也会自动处理编码器过零问题,保证电机的反馈位置与实际位置不发生“跳变”,NC对编码器过零处理的策略与Reference System的设置有关),假如增量型编码器分辨率为24位,2^24=16777216,转换成16进制就是0x1000000,此时Encoder Mask和Encoder Sub Mask都应设置为0x1000000-1=0x0FFFFFF.
对于单圈绝对值编码器而言,其设置方法与增量型编码器相同,即Encoder Mask和Encoder submask的设置保持一致即可,其值=单圈绝对值编码器分辨率最大值-1,例如单圈绝对值编码器为12位,则
Encoder Mas=2^12-1=4096-1=4095=0xFFF;
Encoder submask=2^12-1=4096-1=4095=0xFFF;
对于一些日系单圈绝对值编码器,其内部设置有细分和倍频电路,这样的编码器输出分辨率一般都是物理分辨率X细分系数X倍频系数,例如编码器的物理分辨率只有10位,但是经过16倍细分和4倍频以后,这个分辨率就成了10+4+2=16位,那么在NC中设置的时候,是以编码器的输出分辨率为准的,即
Encoder Mas=2^16-1=65536-1=65535=0xFFFF;
Encoder submask=2^16-1=65536-1=65535=0xFFFF;
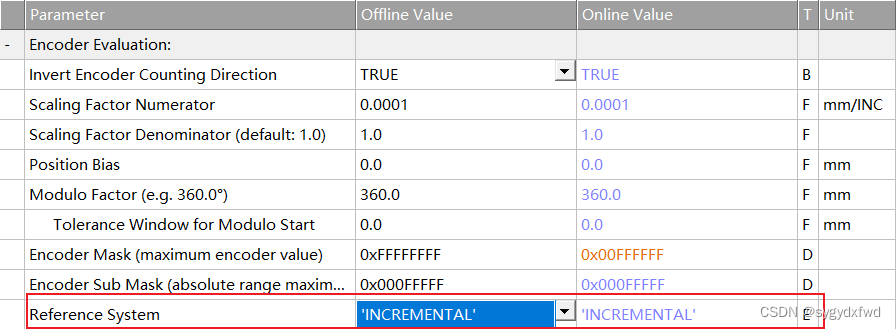
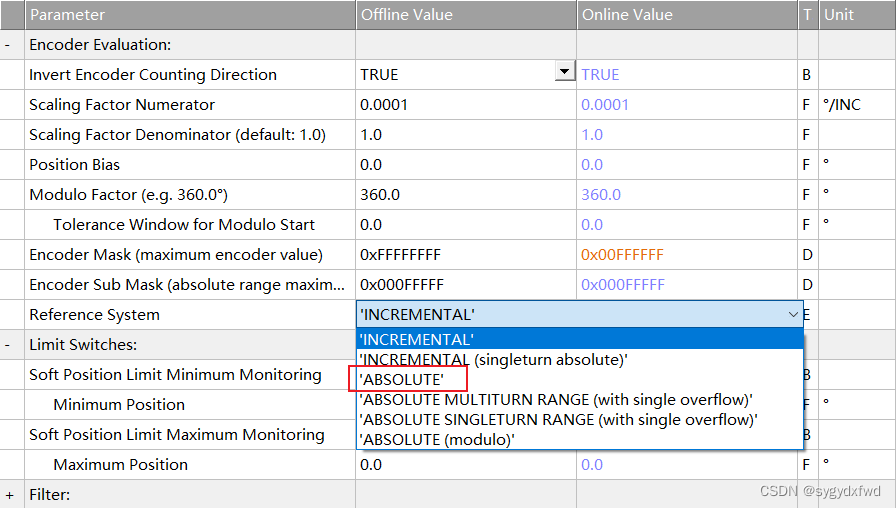
Reference System:参考系统,这个参数决定了NC如何解读encoder的读数,会影响NC对于编码器反馈值溢出时的处理策略,轴上电后当前位置的处理策略以及轴下电时校准机械位移的补偿策略,此参数未进行深入研究,就目前的应用而言,通常选INCREMENTAL即可。
INCREMENTAL实际上可以支持使用增量型编码器和绝对值型编码器,而且在编码器计数值溢出时,NC不会报错,而是继续计数(NC自动处理过零问题),这样我们实际使用时就不用考虑编码器的过零溢出处理了,这部分工作由NC来做。选择这个INCREMENTAL作为参考系统,需要我们自己做寻零位的处理,每次上电后需要自己走一边寻零程序,然后才能走实际的工艺行程。
也有一部分应用是需要在整个工艺行程中记忆绝对位置,需要使用多圈绝对值编码器,且其计数值可以覆盖整个工艺行程,要求无论何时上下电,都可以准确知道轴的实际位置,且若因为下电期间,轴意外动作,再次上电时需要知道轴移位后的当前实际位置值,这种情况下就可以选择ABSOLUTE,选择这个参考系统后,当计数值超过Encoder Mask的设定值时(即多圈溢出情况)就会导致轴报错,本质上是NC不再去处理编码器过零问题,一旦多圈溢出,NC就报告错误,选择这个参考系统的好处是无论何时上下电,NC都会认为当前Enc反馈上来的位置读数就是轴的实际位置,而不必进行寻零操作。
那用了多圈绝对值编码器,但是选择了INCREMENTAL参考系统会有什么影响呢?
二者的主要分别在于,NC是否处理编码器过零,选择了INCREMENTAL,NC就不处理编码器过零问题,如果由于设计原因或者实际使用时装配问题等等导致在一个工艺行程中发生了多圈溢出,那么使用INCREMENTAL参考系统,NC不会报错且会继续计数,但是编码器因为发生溢出,其计数值不再增加,一直输出最大计数值,这样经过几个NC周期后,就会发生超差报警(若启用了超差报警监控的话)或者飞车(关闭超差报警时,设定值与反馈值之差一直增大,导致驱动器不断增大设定值,直至轴飞车),当然了,驱动器本身也会有一些安全处理,不一定会发生飞车现象,要看具体驱动器的支持能力是否有对应的安全处理措施。
如何更改NC中的显示单位
如下图所示,NC默认的显示单位是mm
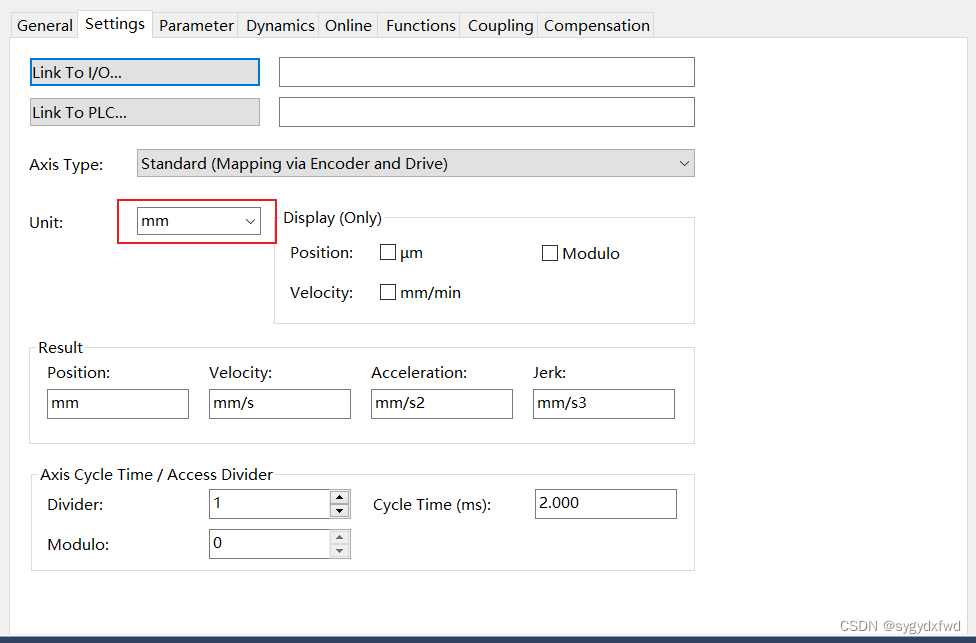
从此处的下拉箭头中选择不同的显示单位即可,如下图所示。
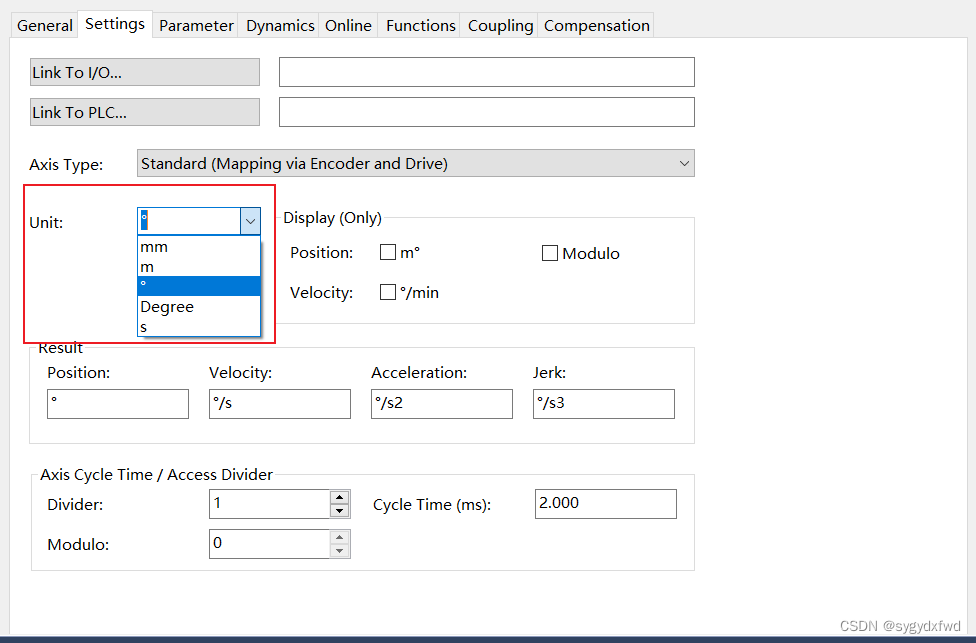
其中旋转工件可以选择°作为显示单位。

















 1535
1535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









