






本工具箱教程以控制系统模型创建、分析与设计流程为主线,通过大量示例介绍MWORKS控制系统工具箱的功能和具体使用。共计10篇文章,上一篇主要介绍了控制系统模型创建。
同元软控:【MWORKS专业工具箱系列教程】控制系列工具箱第一期:控制系统模型创建
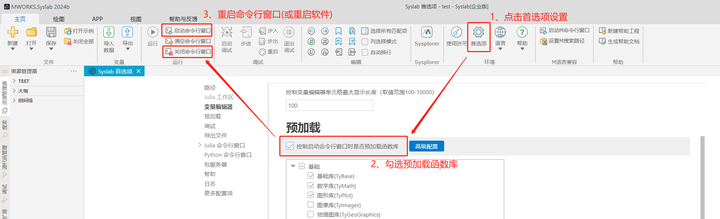
本教程代码均可直接复制到Syslab中运行,使用教程中代码前需参照下述方法加载函数库内容:
方法一:在Syslab的命令行窗口分别输入using TyControlSystems、using TyPlot并回车(重启软件或命令行窗口后需重新输入);
方法二:按照下图中的方法预加载函数库(设置好后每次启动软件默认加载)。
第二期:控制系统模型转换
本期介绍的控制系统模型转换包括两部分:模型类转换、连续离散转换。
1. 模型类转换
系统的各种模型之间可以相互转换。
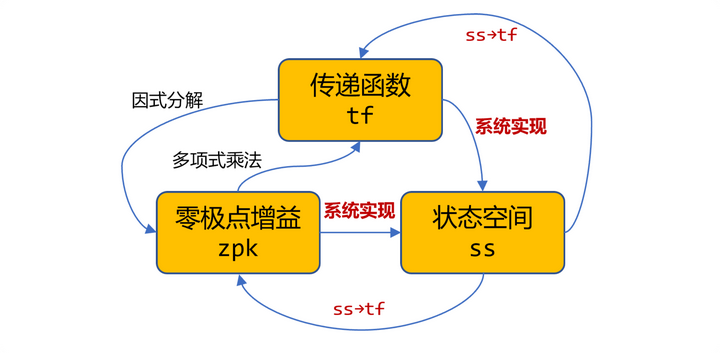
传递函数模型 tf 与零极点增益模型 zpk 之间的转换比较简单,对多项式进行处理即可。从传递函数模型 tf 到状态空间模型 ss 的转换称之为系统实现,反之,也可通过计算方式得到。
-
系统实现:对以下形式的传递函数转化为状态空间表达式,即为系统实现。
将上述形式传递函数转化为以下的状态空间模型:

-
状态空间模型到传递函数的转化 ss→tf
![]()
上述两种形式转换的具体推导不在此赘述。
Syslab 中可以直接通过 tf()、ss()、zpk() 函数实现不同表达形式模型之间的相互转换
示例9:将以下状态空间模型转化为传递函数模型

output:
输入 1 到输出 1
1.0s
-------------------
1.0s^2 + 4.0s + 5.0
输入 2 到输出 1
1.0s^2 + 5.0s + 8.0
-------------------
1.0s^2 + 4.0s + 5.0
Delay: 0.0
连续时间传递函数模型示例10:将以下零极点增益模型转化为状态空间模型

output:
A =
0.0 4.0 0.0
0.0 0.0 8.0
-5.0 -14.5 -20.0
B =
0.0
0.0
2.0
C =
0.78125 0.625 0.0
D =
0.0
连续时间状态空间模型2. 连续离散转换
Syslab支持连续-离散系统模型的相互转换,以及离散系统之间的重采样。
示例11:将以下连续模型离散化,采样时间为 ts = 0.1s

output:
julia> Gd
0.07735946566180907z - 0.08556727104741424
-------------------------------------------------
1.0z^2 - 1.6292810191076135z + 0.6703200460356392
Delay: 0.0
Sample Time: 0.1 (seconds)
离散时间传递函数模型
julia> Gd1
0.042263385959546824z^2 - 0.010930071156678337z - 0.03954112018847361
--------------------------------------------------------------------
1.0z^2 - 1.6292810191076135z + 0.6703200460356392
Delay: 0.0
Sample Time: 0.1 (seconds)
离散时间传递函数模型
示例12:将以下离散时间系统进行重采样,重采样时间为 ts = 0.02s

output:
julia> H
1.0z - 1.0
-------------------
1.0z^2 + 1.0z + 0.3
Delay: 0.0
Sample Time: 0.1 (seconds)
离散时间传递函数模型
julia> Hc
2.0527782215874124z - 2.052778221587414
-------------------------------------------------
1.0z^2 - 1.5169814293463761z + 0.7860030855966229
Delay: 0.0
Sample Time: 0.02 (seconds)
离散时间传递函数模型时、频域响应对比




模型转换相关主要Syslab函数如下
| 函数及调用方式 | 说明 |
|---|---|
| sys = tf(ltisys) | 将ltisys系统转化为传递函数模型,ltisys可以为ss、zpk |
| sys = ss(ltiSys) | 将ltisys系统转化为状态空间模型,ltisys可以为tf、zpk |
| sys = zpk(ltiSys) | 将ltisys系统转化为零极点增益模型,ltisys可以为tf、ss |
| sysd = c2d(sysc, Ts) sysd = c2d(sysc, Ts, method) | 将连续时间模型转化为离散时间模型 |
| sysc = d2c(sysd) sysc = d2c(sysd, method) | 将离散时间模型转化为连续时间模型 |
| sys1 = d2d(sysc, Ts) sys1 = d2d(sysc, Ts, method) | 对离散时间动态系统模型进行重新采样,以产生具有新采样时间 Ts (以秒为单位) 的等效离散时间模型 |
其余函数请参阅Syslab-控制系统工具箱帮助文档
本系列第三期文章将对控制系统的连接与化简进行详尽解读,敬请关注!















 1189
1189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









