







来源:专知
本文为论文介绍,建议阅读5分钟
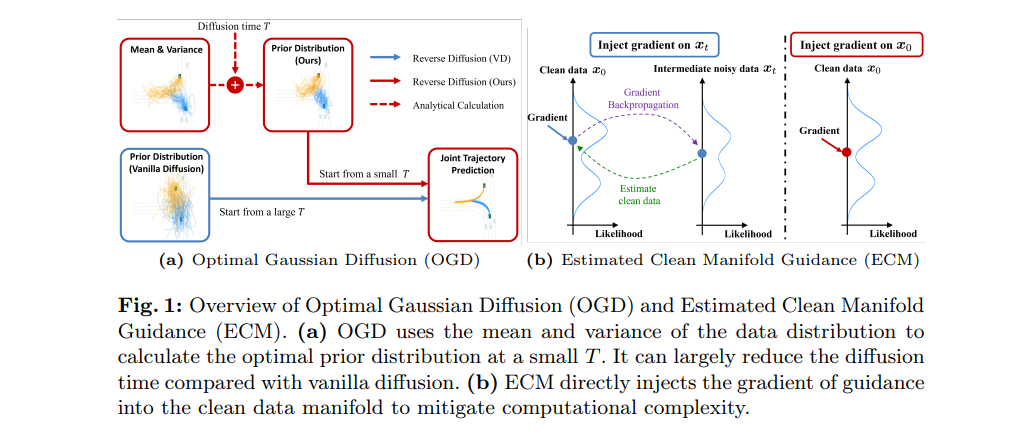
为了应对这些挑战,我们引入了最优高斯扩散(OGD)和估计清洁流形(ECM)引导。
扩散模型在自动驾驶的联合轨迹预测和可控生成方面展现出了潜力,但它们面临着推理步骤效率低下和计算需求高的挑战。为了应对这些挑战,我们引入了最优高斯扩散(OGD)和估计清洁流形(ECM)引导。OGD优化了小扩散时间T的先验分布,并从此开始逆向扩散过程。ECM直接向估计的清洁流形注入引导梯度,消除了整个网络中广泛的梯度反向传播。我们的方法简化了生成过程,使实际应用能够减少计算开销。在大规模的Argoverse 2数据集上进行的实验验证表明,我们的方法性能卓越,为自动驾驶的计算效率高、质量高的联合轨迹预测和可控生成提供了一个可行的解决方案。我们的项目网页位于
https://yixiaowang7.github.io/OptTrajDiff_Page/
关键词:扩散模型、自动驾驶、轨迹预测、可控轨迹生成。
关于我们
数据派THU作为数据科学类公众号,背靠清华大学大数据研究中心,分享前沿数据科学与大数据技术创新研究动态、持续传播数据科学知识,努力建设数据人才聚集平台、打造中国大数据最强集团军。

新浪微博:@数据派THU
微信视频号:数据派THU
今日头条:数据派THU















 6
6

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









