






这节课主要内容就是介绍连续随机系统的离散化、连续时间KF和噪声相关的卡尔曼滤波,更多的是一个公式推导,这里就不过多介绍,仅给一个最终结果。
1 连续随机系统的离散化与连续时间KF
1.1 连续时间方程系统离散化
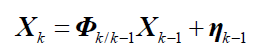
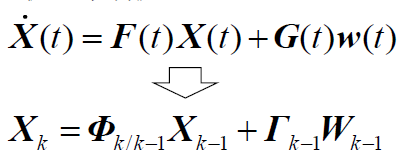
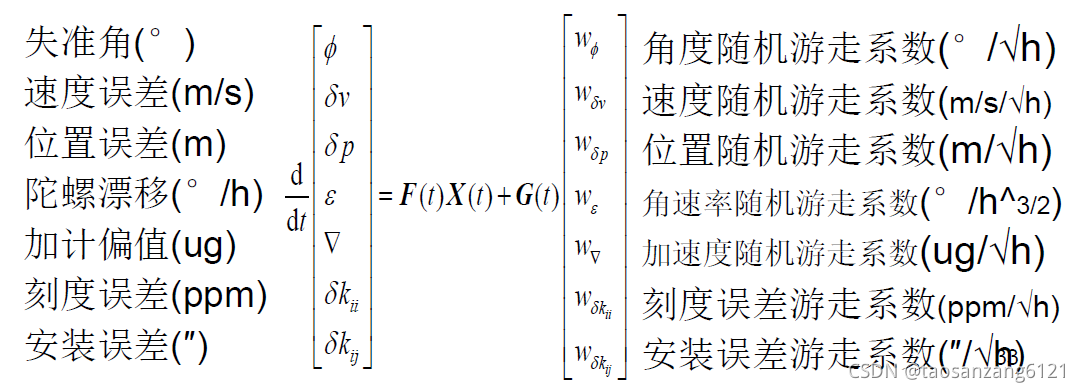
连续时间方程

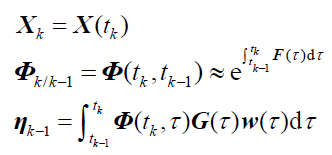
离散化后的形式
其中:
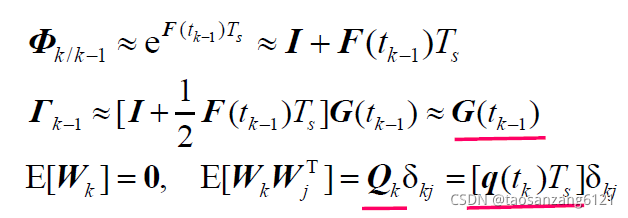
最终离散化结论
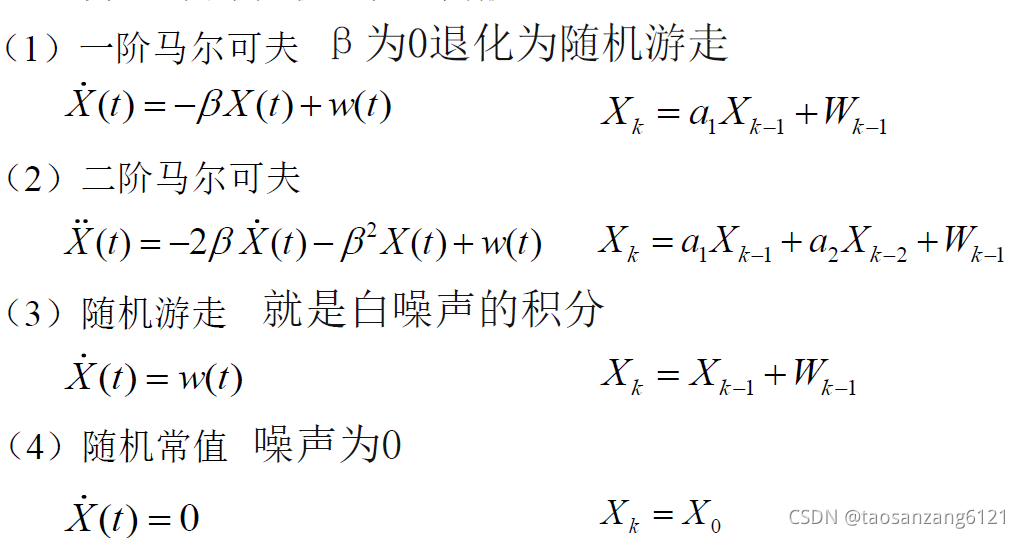
一些简单的随机过程离散化
1.2 量测方差离散化
量测方程

离散化结果
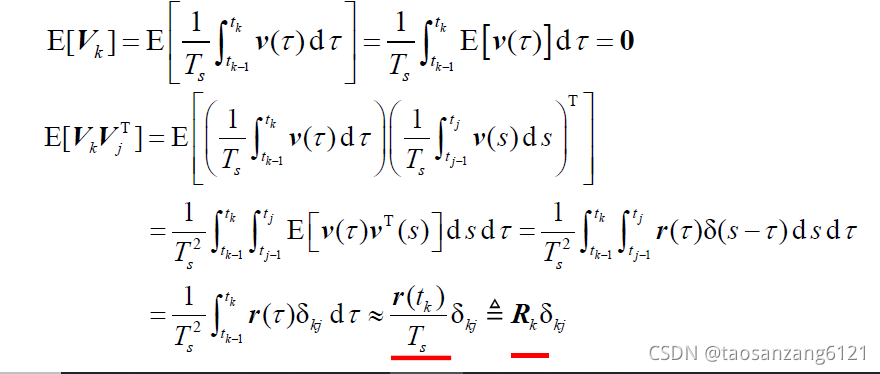
观测噪声方差阵与离散化间隔有关系,离散化间隔越小,等效的方差应该越大。
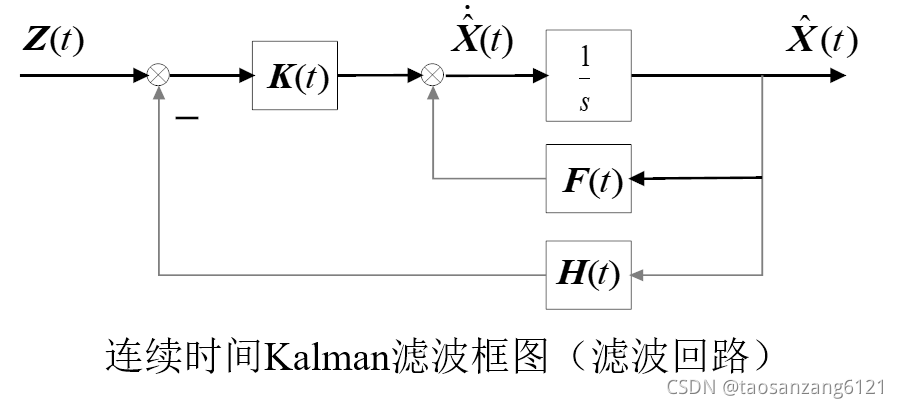
1.3 连续时间卡尔曼滤波

连续时间卡尔曼滤波是个微分方程,获得连续时间卡尔曼滤波结果需要解这个微分方程(矩阵黎卡蒂(Riccati)方程)。
2 噪声条件下相关的卡尔曼滤波
卡尔曼滤波噪声分为系统噪声和量测噪声,下面就分别讨论他们之间互相相关时的处理方法
2.1 系统噪声与量测噪声相关

可以将状态方程改写为

其中J是个待求矩阵。为求这个矩阵对新的系统噪声W进行分析,此时系统噪声与量测噪声的关系是如下式,两者无关需要其等于0,求得J的前提是必须准确知道S,实际情况中S很难获得,所以一般都认为系统噪声与量测噪声不相关。


新系统噪声为:

其滤波过程可以总结为:
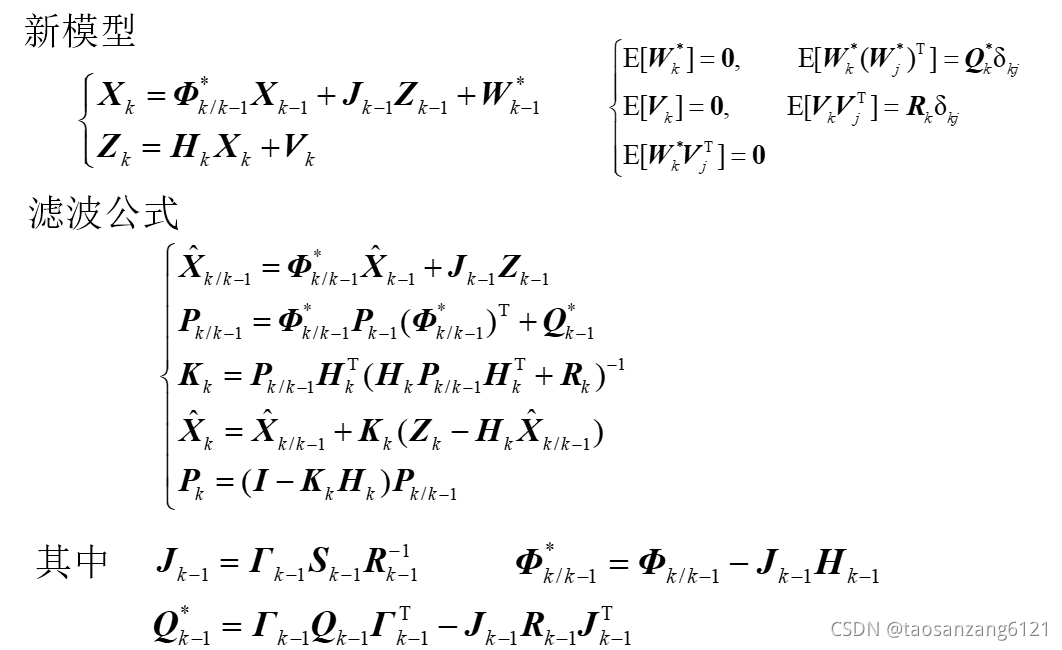
由上可知,当前时刻是由上一时刻推过来的,因为必须有两次观测才能得到结果。
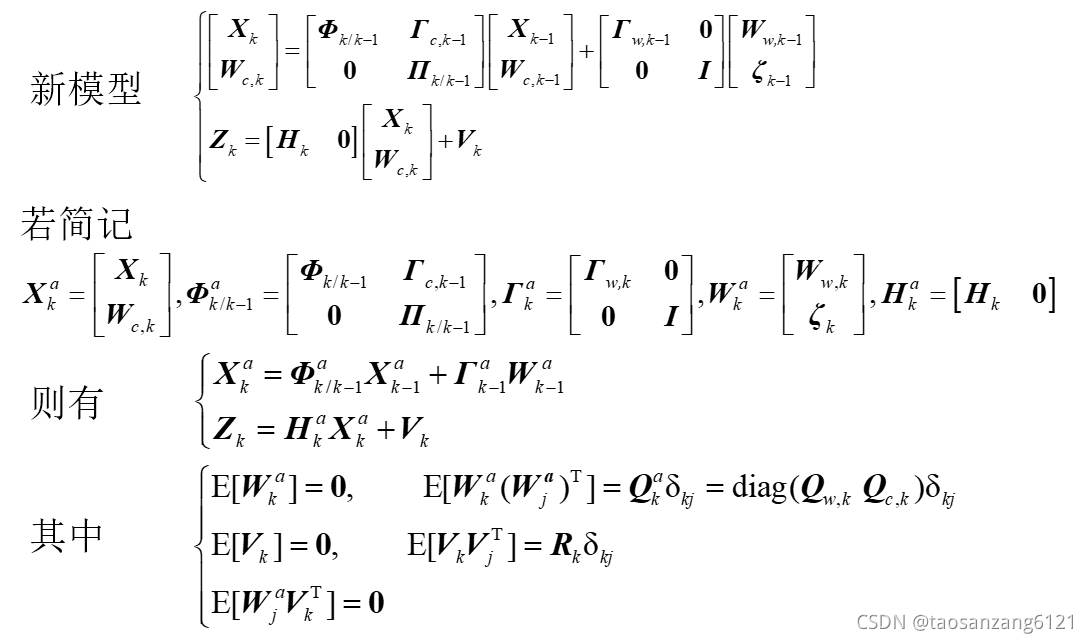
2.2 系统噪声为有色噪声
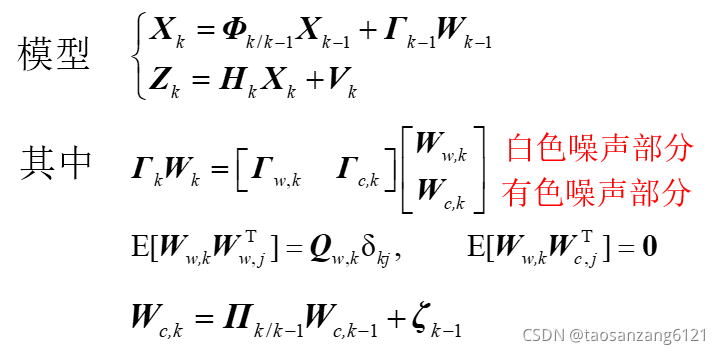
系统噪声为有色噪声处理的前提条件是有色部分必须可以建模
此时的处理方式为,对有色噪声进行建模,将其作为参数进行估计
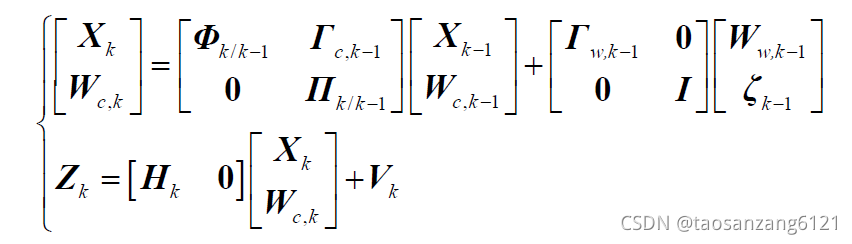
可以得到滤波模型
2.3 量测噪声为有色噪声
在实际情况下其实用白噪声去对其进行建模,其结果相差不了多少,不需要考虑是否有色。

此时有两种解决方法
方法一:与2.2一样对噪声建模
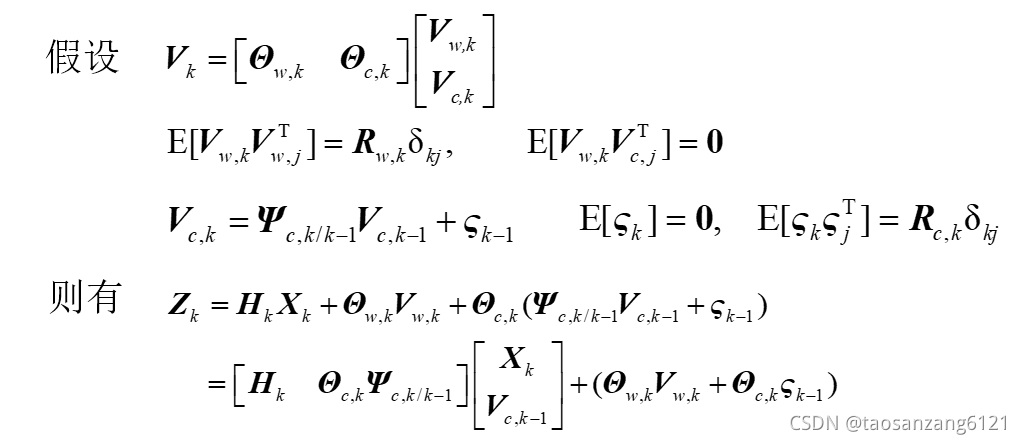
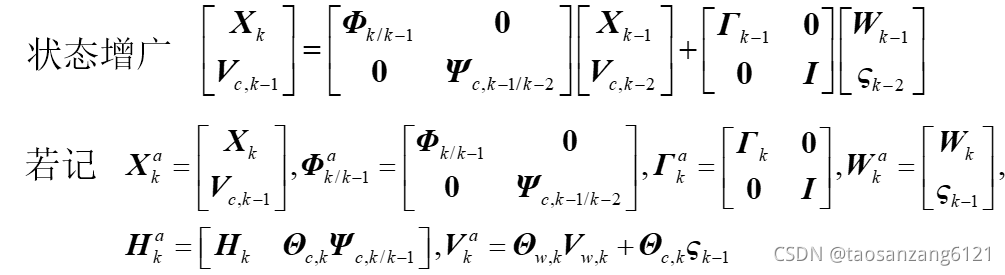
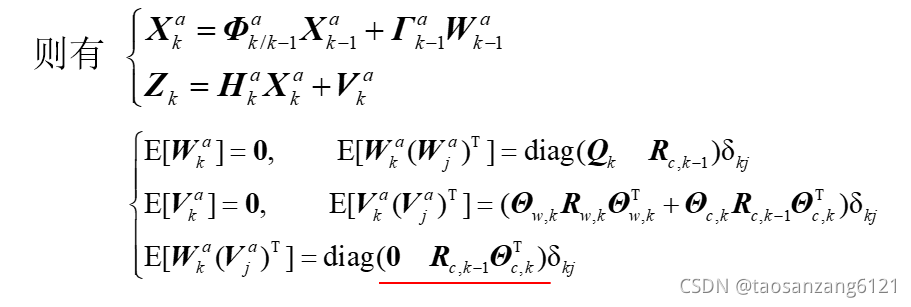
通过画红线的地方可以看出此时系统噪声和量测噪声是相关的,要再参考2.1中去相关
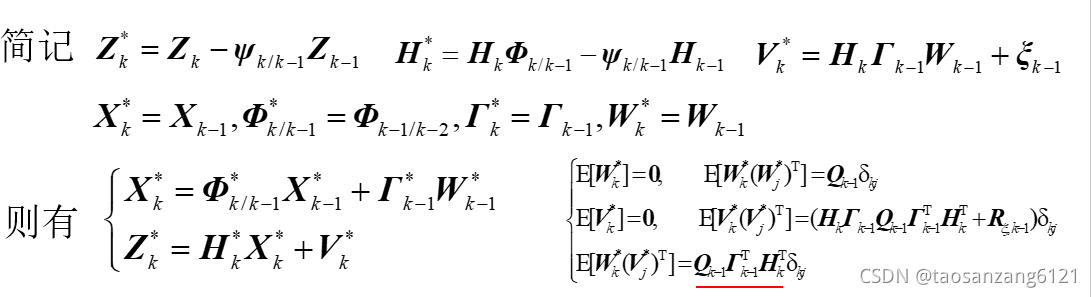
方法二 测量求差法
观测噪声模型为:

前后相邻历元量测求差

上式的后半部分则是新的量测噪声,是个白噪声。最后得到模型:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









