






视频课的第三期(隔了好久才捡起来,前面的都要忘记了),这节主要就是介绍序贯滤波、信息滤波和平方根滤波
1 序贯滤波
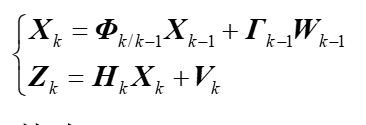
序贯滤波适用的情况为,观测为非常高维,每个观测可以看为一个小观测,例如用七天的观测值进行滤波,每一天为一个小观测,其模型可以表示为:

序贯滤波执行框图如下图所示

没有量测的时候就持续预测,有量测时则逐个观测值更新,每次量测更新相当于进行递推最小二乘,序贯滤波的好处就是矩阵维数变小,计算量更小。
如果量测噪声不是对角阵,可以做平方根分解:
可以得到新的量测方程:
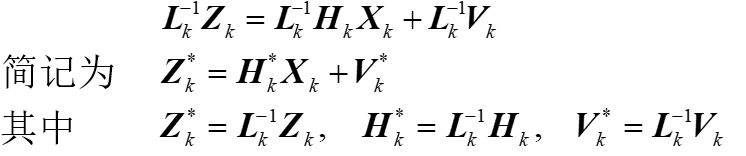
此时,新的量测噪声方差为单位阵

2.信息滤波和信息融合
2.1信息滤波
卡尔曼滤波的递推是需要初值的,当对初值信息一无所知时,初值的方差阵就是无穷大,但滤波方差阵不可能设置成无穷大,于是引用了信息滤波,信息是方差的逆,用I表示,意义为状态估计中含有信息量的大小,当方差阵P为无穷大时,信息I就为0,可以推出信息滤波的公式(IKF):

但此形式的IKF求逆过多,可由矩阵求逆定理转换为下式

KF的方差阵与IKF的信息阵之间存在对偶关系

对于KF:时间更新相当于上一历元的不确定度,加上预测的不确定度,使得误差增大;量测更新相当于增加了信息量,使得误差变小。
2.2信息融合
普通最小二乘方程:Z=HX+V
下面就是一组特殊的最小二乘问题(H为单位阵):对同一个值做不同的观测,每个观测的误差相互独立,

由递推最小二乘(RLS)可推导信息最小二乘(IRLS)公式:

信息最小二乘求全局的状态估计:全局的状态Ig=上一刻的
I
N
−
1
I_{N-1}
IN−1+本时刻
P
N
−
1
P_N^{-1}
PN−1,以此类推可以得到下图左式。对于S也可以相加递推得到右式。

由此可以得到信息融合的公式:

卡尔曼滤波可由最小二乘与信息融合推导过来
卡尔曼滤波状态方程和观测方程可以认为是两种相互独立的观测方式

采用信息融合进行推导就可以得到卡尔曼滤波公式
状态:

方差:

3.平方根滤波
电脑的存储精度有限,为了提升均方差计算精度,可以采用平方根滤波,平方根分解是指把一个矩阵分解成一个上三角阵与下三角阵相乘,卡尔曼滤波涉及到的方差包括:

卡尔曼滤波回路表示为:

平方根滤波需要把方差用平方根的方式参与计算,即

3.1Potter平方根滤波
直接给出结果,过程不再推导
(1)均方差阵的量测更新(必须标量量测,不是标量可以用序贯)
这一步要实现的递推为:

递推方法:

其中:


(2)均方差阵的时间更新

将红框中的矩阵QR分解得:

则
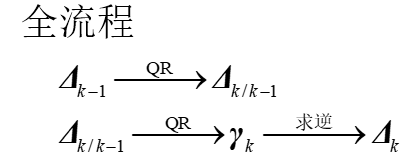
(3)平方根滤波流程

(4)向量量测情形下的均方差阵量测更新

3.2奇异值(SVD)分解滤波
(1)一步预测均方差SVD分解

其分解后

(2)量测更新分解

SVD分解计算量比较大,其用处不大
3.3 UD分解滤波
UD分解滤波运算量小,比较常用
(1)量测更新(必须是标量)


(2)时间更新


3.4平方根信息滤波(SRIKF)















 6494
6494











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









