






Sage-Husa自适应滤波
自适应滤波的状态空间模型为:
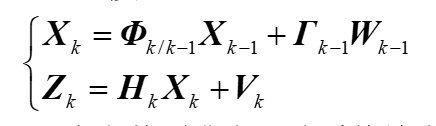
自适应滤波适用的系统为噪声和噪声的方差未知,且不是零均值。由于噪声未知,噪声参数的不准确可能会影响系统输出,此时自适应滤波采用一边进行参数估计一边进行状态识别来处理。
自适应滤波的原则:噪声均值均可等效于状态增广(作为参数进行估计),激励噪声方差难以自适应,量测噪声方差相对容易自适应(可观测性更强的系统,才适用于自适应滤波),应尽量减少噪声自适应参数的数目。
量测噪声的自适应方法:


观测噪声方差R未知,由上式可以表示为:

上式是一种统计的满足,用时间平均来估计R
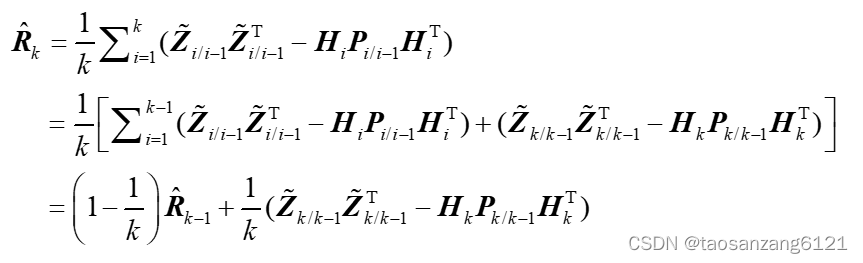
上式为一种等加权平均,但随着时间的增长,1/k区域0,则随着时间的增长其自适应能力越差,因此可以采用一种指数渐消记忆的方法:


渐消因子的确定方式就是自己不断的尝试,一般的取值都是0.9,0.99等比较接近于1的数。
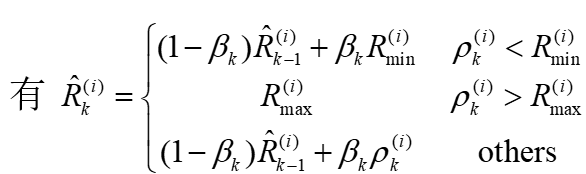
当实际噪声比较小时,容易出现量测方差负定,可改用“序贯量测+方差受限”自适应方法加以解决:


自适应滤波过程就如下图所示:
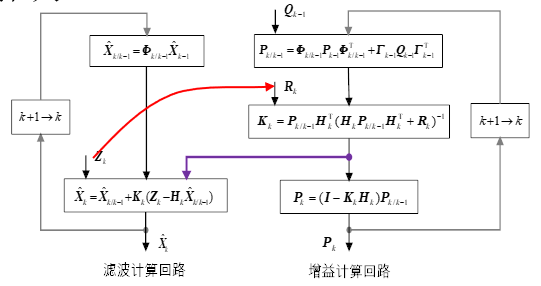 普通的卡尔曼滤波滤波计算回路与增益计算回路之间是独立的,只有增益计算回路中的增益矩阵用于滤波计算回路(紫色箭头),但是自适应中的R受观测值影响(红色箭头),所以自适应滤波系统是一个复杂的非线性系统,系统的稳定性难以证明,只能通过仿真来测试。
普通的卡尔曼滤波滤波计算回路与增益计算回路之间是独立的,只有增益计算回路中的增益矩阵用于滤波计算回路(紫色箭头),但是自适应中的R受观测值影响(红色箭头),所以自适应滤波系统是一个复杂的非线性系统,系统的稳定性难以证明,只能通过仿真来测试。

















 555
555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









