









1. 写在前面
必须要先说一句,卡尔曼滤波是一个递归算法,可以用在任何存在不确定信息的系统中。
由于工作的原因,在研究多目标跟踪的过程中顺带详细研究了卡尔曼滤波。虽然早就开始接触,但不同时期的理解显然不一样。接下来,将分为几期与大家分享。
2. 卡尔曼的用途
卡尔曼滤波,虽然叫滤波,但实际上并不等同于传统意义上的滤波,更像是一种估计算法。
卡尔曼滤波的用途非常广泛,以下我们详细聊一聊。
(1)导航和定位
在导航系统中,卡尔曼滤波常用于整合来自GPS、惯性导航系统(IMU)和其他传感器的数据,以实现准确的位置和姿态估计。通过融合不同传感器的信息,卡尔曼滤波可以提高导航系统的精度和稳定性,尤其是在GPS信号不稳定或者部分遮挡的情况下。
(2)信号处理
在通信系统和雷达系统中,卡尔曼滤波常用于估计信号的参数,如信号的频率、幅度和相位。通过对信号进行滤波和估计,可以提高系统的信号检测性能和抗干扰能力。
(3)控制系统
在控制系统中,卡尔曼滤波常用于状态估计和系统诊断,以提供反馈控制器所需的状态信息。通过对系统状态进行实时估计和预测,可以实现控制系统的稳定性、响应速度和鲁棒性。
(4)目标跟踪
在多目标跟踪中,利用卡尔曼技术实现对多个目标的位置进行实时跟踪。
3. 卡尔曼的工作过程
在很多学习资料中都有讲到,卡尔曼滤波是经过两个阶段,分别是预测和新息(更新)来完成对状态变量的完全估计。但从另一方面讲,在预测和新息之间,还有一步叫做投影,即将状态预测投影到测量空间。因此,我们在本资料中,将卡尔曼分为三个步骤。
(1)预测
预测阶段是利用上一时刻的最优估计对下一时刻的状态进行预测,同时计算预测误差的协方差矩阵。
(2)投影
投影阶段是将“预测”阶段的状态投影到测量空间中,预测测量值和测量误差的协方差矩阵。
(3)新息(更新)
新息,或者叫更新阶段,是利用观测值对预测的状态进行调整,获得一个最优估计,同时获得最优估计的误差协方差矩阵。
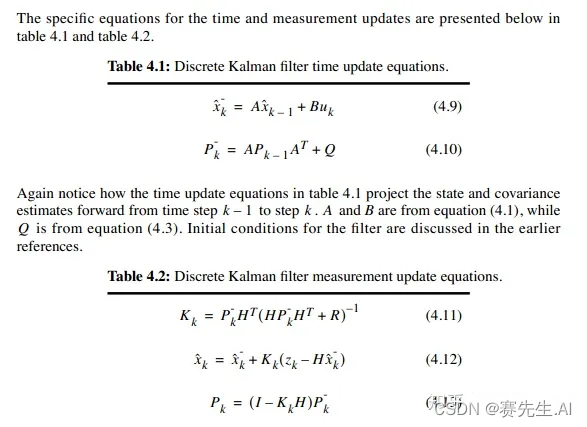
4. 黄金五公式
直接上截图,后面通过递推公式进行更详细的解释。















 926
926

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









