







 本文介绍了三维空间中使用欧拉角表示物体朝向的方法,包括俯仰角、偏航角和滚转角的数学计算过程及应用实例。
本文介绍了三维空间中使用欧拉角表示物体朝向的方法,包括俯仰角、偏航角和滚转角的数学计算过程及应用实例。
1. 定义
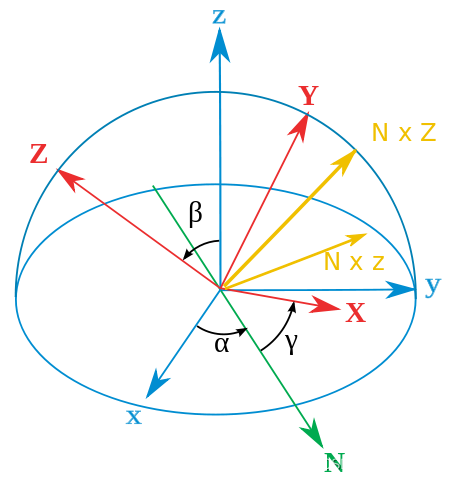
在三维空间中通过指定与三个旋转轴相关联的三个角度来最小参数化表示任意方向。
作者理解:依次围绕xyz 3个轴转3次之后的3个值,用来表示物体朝向。
- 轴的顺序没有要求
- 每次围绕的轴在每次旋转后已经变了

分别绕着原坐标z轴(蓝),一次旋转以后的x轴(绿)以及两次旋转以后的z轴(红)旋转,最终产生的红色坐标系即表示出目标方向。
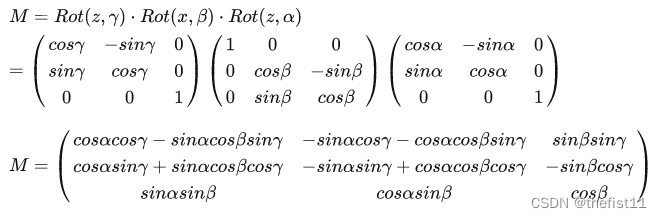
1.1 数学计算
新生成的坐标系 (XYZ) 由原坐标系 (xyz)乘以矩阵。

2. 一共有3种欧拉角:俯仰角(Pitch)、偏航角(Yaw)和滚转角(Roll)
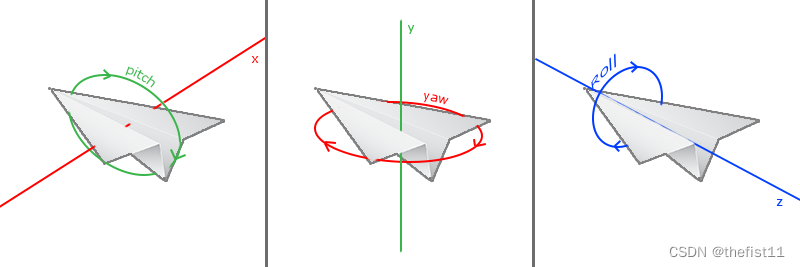
2.1 俯仰角pitch
y值等于sin θ
direction.y = sin(glm::radians(pitch)); // 注意我们先把角度转为弧度
direction.x = cos(glm::radians(pitch));
direction.z = cos(glm::radians(pitch));
2.2 偏航角yaw
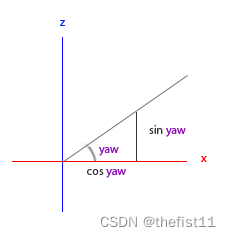
direction.x = cos(glm::radians(pitch)) * cos(glm::radians(yaw)); // 译注:direction代表摄像机的前轴(Front),这个前轴是和本文第一幅图片的第二个摄像机的方向向量是相反的
direction.y = sin(glm::radians(pitch));
direction.z = cos(glm::radians(pitch)) * sin(glm::radians(yaw));


















 7457
7457

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











