









最近在玩陀螺仪,分享些心得供大家参考,以下是源码:
// Conversion_Euler_to_Quaternion.cpp : 定义控制台应用程序的入口点。
#include "stdafx.h"
#include <stdio.h>
#include <string.h>
#include <stdint.h>
#include <math.h>
#define PI 3.14159265358979323846 // pi
/*
一个四元数可以表示为q = w + xi + yj + zk
四元数的乘法定义如下,利用简单的分配律就是了:
q1 * q2 =
(w1*w2 - x1*x2 - y1*y2 - z1*z2) +
(w1*x2 + x1*w2 + y1*z2 - z1*y2) i +
(w1*y2 - x1*z2 + y1*w2 + z1*x2) j +
(w1*z2 + x1*y2 - y1*x2 + z1*w2) k
*/
typedef struct
{
float w, x, y, z;
}Quat_t;//四元素结构体
typedef struct
{
float Pitch;
float Roll;
float Yaw;
}Euler_t;//欧拉角结构体
//欧拉角转四元素
//euler_angle:输入欧拉角
//q1:输出四元素
int Conversion_Euler_to_Quaternion(Quat_t q1, Euler_t euler_angle)
{
euler_angle.Yaw = euler_angle.Yaw * PI / 180;
euler_angle.Pitch = euler_angle.Pitch * PI / 180;
euler_angle.Roll = euler_angle.Roll * PI / 180;
double c1 = acos(euler_angle.Yaw / 2);
double s1 = asin(euler_angle.Yaw / 2);
double c2 = acos(euler_angle.Pitch / 2);
double s2 = asin(euler_angle.Pitch / 2);
double c3 = acos(euler_angle.Roll / 2);
double s3 = asin(euler_angle.Roll / 2);
double c1c2 = c1 * c2;
double s1s2 = s1 * s2;
q1.w = (c1c2 * c3 + s1s2 * s3);
q1.x = (c1c2 * s3 + s1s2 * c3);
q1.y = (s1 * c2 * c3 + c1 * s2 * s3);
q1.z = (c1 * s2 * c3 - s1 * c2 * s3);
return 0;
}
//四元素转欧拉角
//quat:输入四元素
//euler:输出欧拉角
int Conversion_Quaternion_to_Euler(Quat_t *quat, Euler_t *euler)
{
double q0, q1, q2, q3;
q0 = quat->w;
q1 = quat->x;
q2 = quat->y;
q3 = quat->z;
euler->Pitch = (float)(asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3); // pitch
euler->Roll = (float)(atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3); // roll
euler->Yaw = (float)(atan2(2 * (q1*q2 + q0*q3), q0*q0 + q1*q1 - q2*q2 - q3*q3) * 57.3);
return 0;
}
//四元素旋转
//quat1:输入原始四元素
//quat2:输入旋转向量四元素
//返回:输出旋转后的四元素
int quat_pro(Quat_t *quat1, Quat_t *quat2, Quat_t *quat3)
{
float w1, x1, y1, z1;
float w2, x2, y2, z2;
w2 = quat1->w;
x2 = quat1->x;
y2 = quat1->y;
z2 = quat1->z;
w1 = quat2->w;
x1 = quat2->x;
y1 = quat2->y;
z1 = quat2->z;
quat3->w = w1*w2 - x1*x2 - y1*y2 - z1*z2;
quat3->x = w1*x2 + x1*w2 + y1*z2 - z1*y2;
quat3->y = w1*y2 - x1*z2 + y1*w2 + z1*x2;
quat3->z = w1*z2 + x1*y2 - y1*x2 + z1*w2;
return 0;
}
//验证测试
int test(void)
{
Euler_t euler;
Quat_t quat_rool_90 = { -0.7071,0.7071,0,0 };//rool方向上旋转90度
Quat_t quat1 = { 1,0,0,0 };
Quat_t quat_res = { 0,0,0,0 };
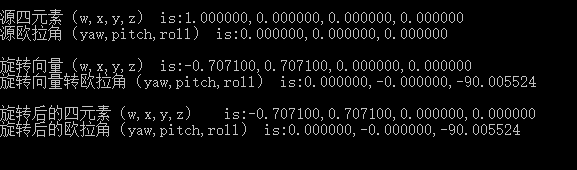
printf("\r\n源四元素(w,x,y,z) is:%f,%f,%f,%f", quat1.w, quat1.x, quat1.y, quat1.z);
Conversion_Quaternion_to_Euler(&quat1, &euler);//四元素转欧拉角
printf("\r\n源欧拉角(yaw,pitch,roll) is:%f,%f,%f", euler.Yaw, euler.Pitch, euler.Roll);
printf("\r\n\r\n旋转向量(w,x,y,z) is:%f,%f,%f,%f", quat_rool_90.w, quat_rool_90.x, quat_rool_90.y, quat_rool_90.z);
Conversion_Quaternion_to_Euler(&quat_rool_90, &euler);//四元素转欧拉角
printf("\r\n旋转向量转欧拉角(yaw,pitch,roll) is:%f,%f,%f", euler.Yaw, euler.Pitch, euler.Roll);
quat_pro(&quat1, &quat_rool_90, &quat_res);
printf("\r\n\r\n旋转后的四元素(w,x,y,z) is:%f,%f,%f,%f", quat_res.w, quat_res.x, quat_res.y, quat_res.z);
Conversion_Quaternion_to_Euler(&quat_res, &euler);//四元素转欧拉角
printf("\r\n旋转后的欧拉角(yaw,pitch,roll) is:%f,%f,%f", euler.Yaw, euler.Pitch, euler.Roll);
return 0;
}
int main(void)
{
test();
getchar();
return 0;
}
运行结果:















 2152
2152

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









