







电机控制—霍尔采样原理
主要介绍一下基于霍尔传感器的位置检测方法的原理,在电机控制的过程中为了掌握好恰当的换相时刻,减少电机的转矩波动,得到最大的转矩,转子位置的检测非常重要。
位置传感器在电机中起着检测转子磁极位置、为控制提供正确换相信息的作用。大致的概述可以叙述如下:
- 位置传感器将转子磁极的位置信号转换成电信号后送入控制器中。
- 控制器控制定子绕组换相,使电枢绕组中的电流随着转子位置的变化按一定次序变化,通过气隙形成步进式旋转磁场,驱动永磁转子连续不断地旋转。
霍尔传感器一般为磁敏式的传感器,HALL传感器具有体积小,成本较低的特点,通常直接在电机的定子上安装三个开关型HALL传感器检测转子位置,间隔60°或者120°安装方式。
霍尔效应原理
- 磁场会对位于其中的带电导体内运动的电荷载流子施加一个垂直于其运动方向的力,该力会使得正负电荷分别积聚到导体的两侧。
- 电荷在导体两侧的积累会平衡磁场的影响,在导体两侧建立稳定的电势差。产生这一电势差的过程就叫做霍尔效应。
霍尔传感器使根据霍尔效应制作的一种磁场传感器,它可以有效的反映通过霍尔元件的此密度。
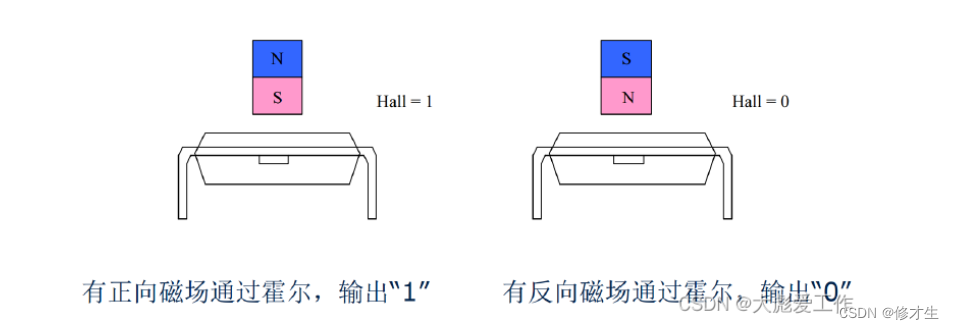
无论何时,只要转子的磁极掠过霍尔元件,根据转子当前的极性,霍尔元件会输出对应逻辑电平0或1,这样只要根据三个霍尔元件产生的电平,就可以判断当前转子的位置,决定电机换相的顺序。
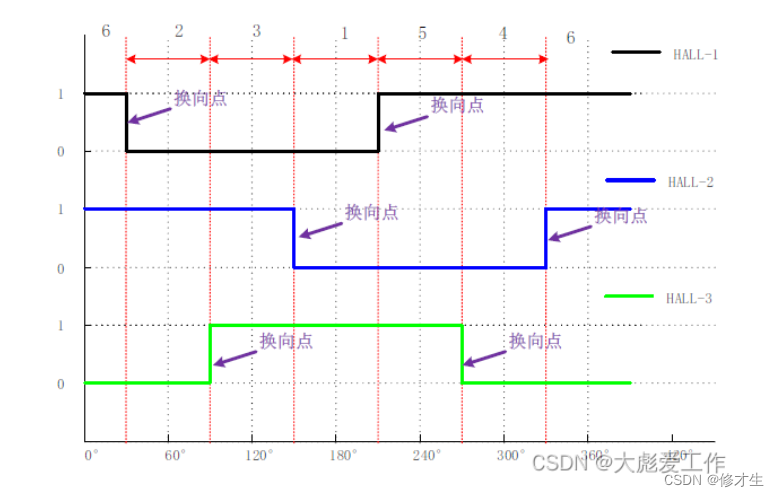
在一个电周期内,三相HALL传感器所产生的开关状态是不重复的,每一个开关状态所占的电角度相等。以120°安装的HALL传感器为例,3个HALL传感器的输出信号相位互差120°,每转过60°电角度,其中一个HALL传感器状态就会改变。在一个电周期内,3个HALL信号的组合有6种状态,正好对应于“六步换相”过程。
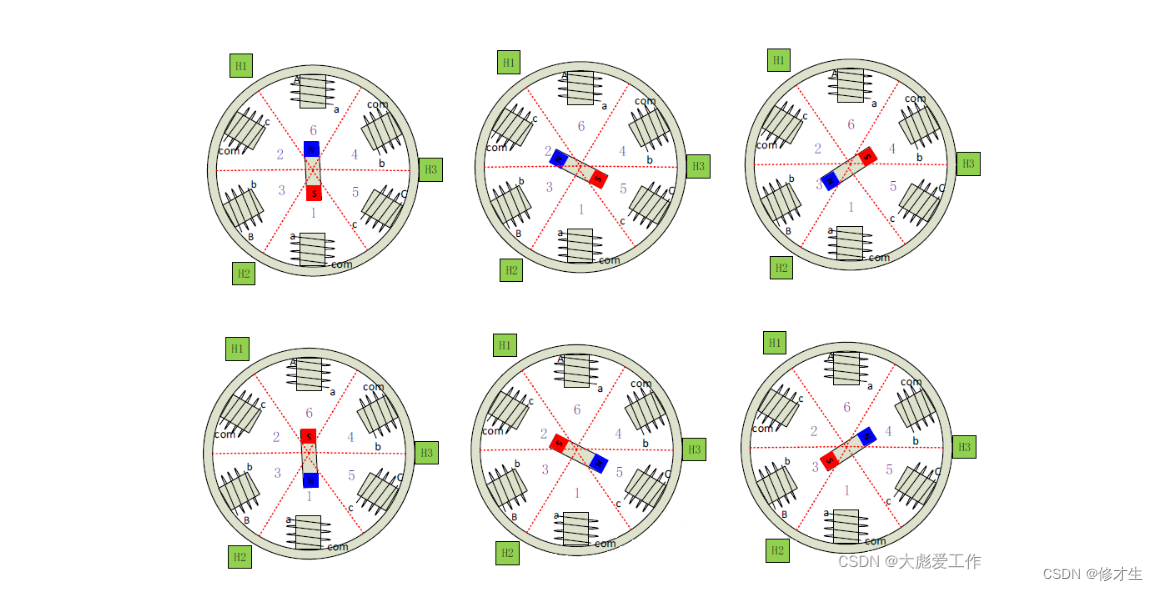
确定好转子位置后,根据转子位置进行换相控制,如下图所示,注意与上图位置稍作了变化。
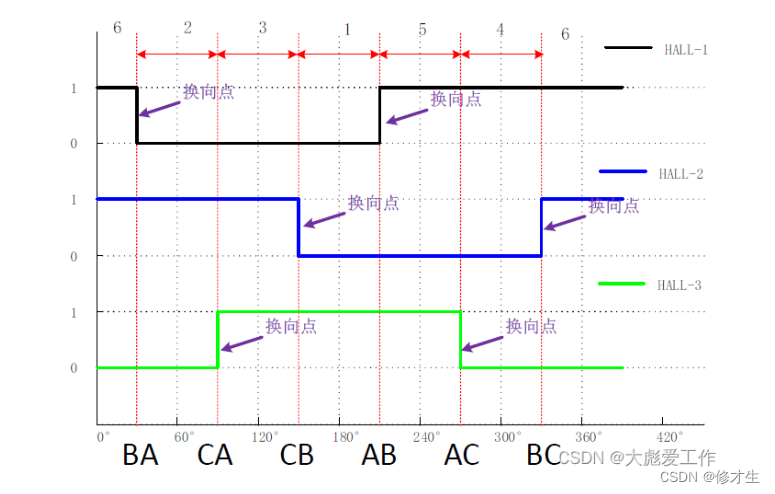
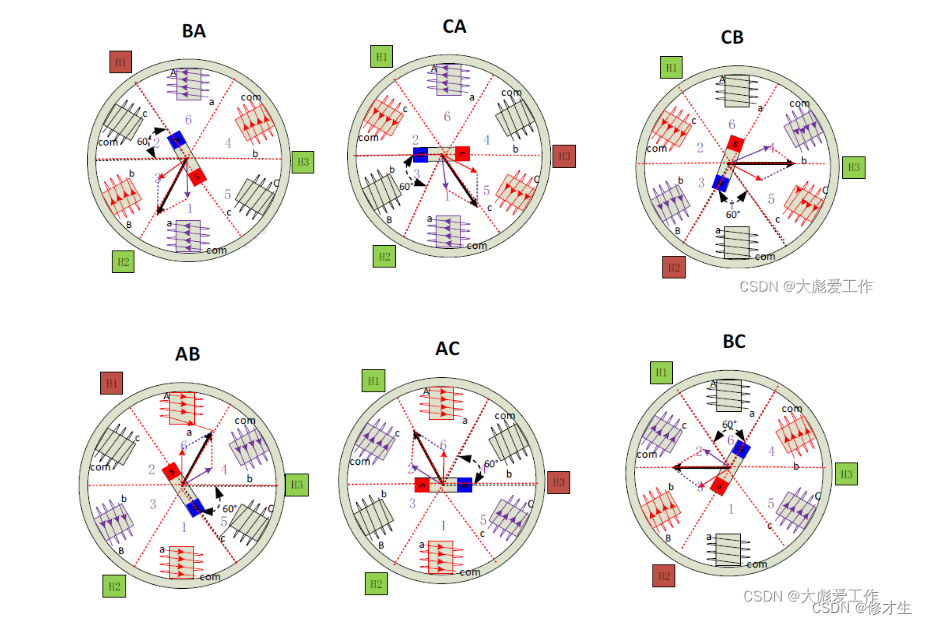
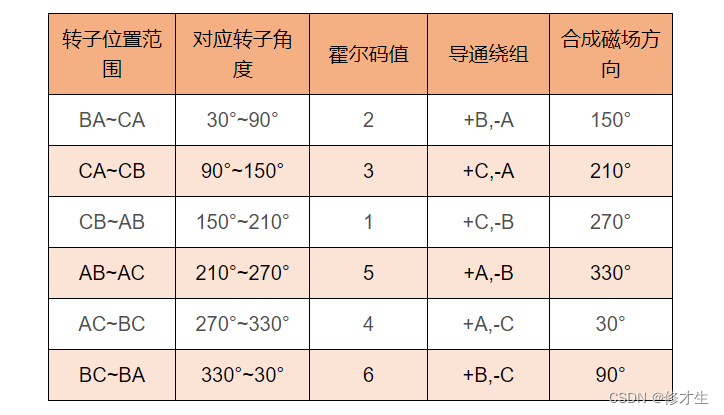
上面两幅图形象得表示出了六个换相点的位置。具体的转子位置与霍尔码值、导通绕组及合成磁场方向见下表。
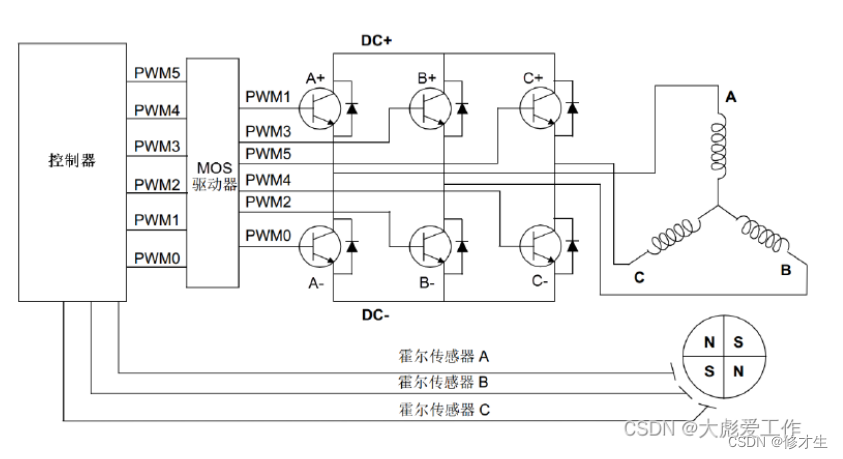
电机驱动电路和控制器组成的系统如下图。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









