









之前做FOC算法的时候,用到了TLV493D磁传感芯片通过两个相差90°的正弦曲线计算角度,所以需要计算arctan的值。这里就基于CORDIC(坐标旋转数字计算方法,Coordinate Rotation Digital Computer)理论,实现一种arctan的定点计算方法。
一、原理
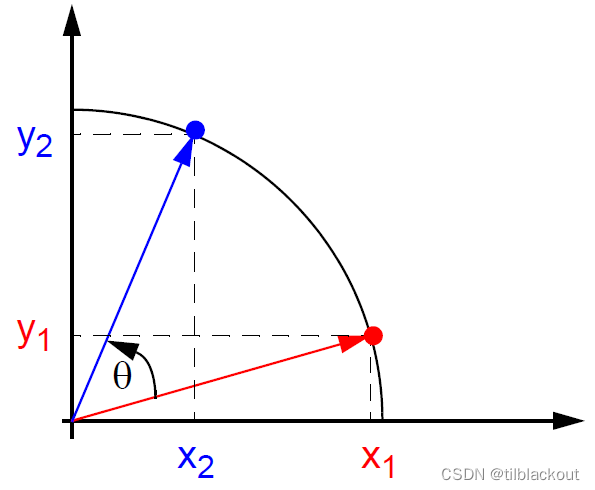
坐标旋转
与FOC中的Park变换原理相同,CORDIC也是通过旋转坐标轴来求解反正切值的。
如果去掉cosθ,这样不会影响角度旋转的结果,只是x和y都被缩小了cosθ,这样能简化计算,这称为伪旋转。得到下式:
而CORDIC的核心则是令,此时得到下式:
(1) 为什么用呢?
因为在实际代码中,可以使用右移操作来完成,能加快计算速度。
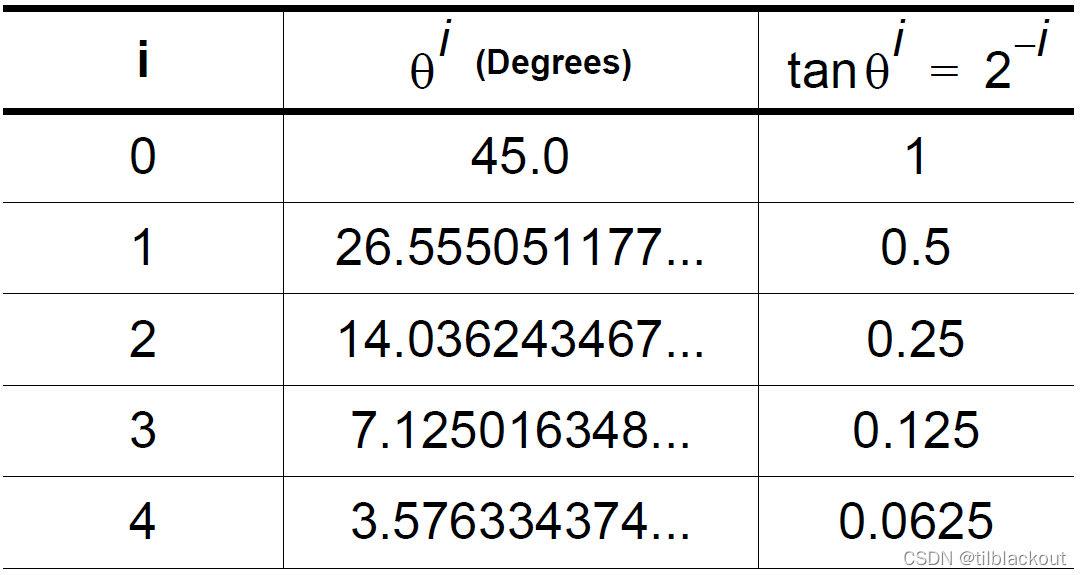
(2)这个方法能计算的角度范围?
上表中列出了5个θ值,若为无穷个呢?由可得
所以可以看出用这个方法能求的角度范围在[-99.8829°,99.8829°]。而在大多数场合,我们的计算范围是在[-180°,180°]。四个象限内的arctan都可以相互转换,且arctan是个奇函数,所以我们只需要将其它角度都转到[0°,45°]范围内计算,得到结果后变换一下即可。
迭代
迭代求arctan的方法的原理就是:每次旋转上面表中计算出的角度,累加这个角度,使y趋近于0。
- y趋近于0的意思,可以把旋转坐标系想象为Park变换。如图所示,坐标轴在以表中的角度旋转,假设此时要求点(1,1)相对x轴的角度,即θ = arctan(1/1) = 45°,坐标轴第一次旋转,则为表中最大的45°,此时在旋转坐标系(下图黑色)中,(1,1)点变为(
,0)。当然在计算的过程中,x最后不会是
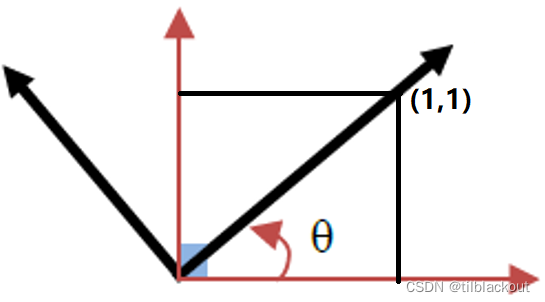
因此,我们只需要不断让坐标轴旋转表中的角度,得到下式:
- 坐标轴在逆时针旋转时
,顺时针旋转时
。其实就是因为
,规定以逆时针旋转为正,顺时针旋转为负。
假设θ=30°,初始角度为0°。第一次逆时针旋转45°,。此时45°>30°,坐标轴要往回旋转26°,
,此时角度为19°<30°,所以
,就这样按表中的角度继续旋转,直到y趋近于0。
二、C语言实现
1、定义tan表格,即表示1、0.5、0.25.....的表格,采用Q15格式保存
#define DEPTH 16 //最大赋值为16
#define DEP_SHIFT (DEPTH-1) //tan数组中的标幺值移位
static uint16_t _tan[DEPTH];
for(i=0; i<DEPTH; i++)
{
_tan[i] = 1<<(DEPTH-i-1); //减1,最大支持Q15表示
}
//如果DEPTH为16,则0号元素为32768,超过int16范围,后续会溢出,故最大元素减1
if(DEPTH == 16)
_tan[0] -= 1;2、定义angle表格
#include <math.h>
#define DIVPI 57.295779513082 //即弧度转角度,180/pi
#define ANG_AMP 64 //角度放大的倍数,理论上来说越大精度越高,建议设为2的倍数
#define ANG_PRECICE 100 //计算出来的结果是小数点后几位的,100表示后两位
#define ANG_MUL (ANG_AMP*ANG_PRECICE)
static uint32_t _angle[DEPTH]; //tanθ = 2^(-i)时对应的θ值
double ang_tmp = 1;
for(i=0; i<DEPTH; i++)
{
res = (int)(1.0 * atan(ang_tmp) * DIVPI * ANG_MUL);
_angle[i] = res;
ang_tmp /= 2;
}- 在确定好求解深度DEPTH后,上述表格都可以先求出来放在一个const数组中,而不用每次初始化中计算。
由于FOC中使用的是int16_t来表示0~360°,故将宏定义定义为如下:
#define ANG_AMP 182.5487465181058
#define ANG_PRECICE 32最后的结果右移5位赋值给int16_t变量,即为FOC表示的电角度。
3、CORDIC算法
(1)预处理:所有角度都转为第一象限的[0°,45°]范围内处理
①保证x、y都大于0,即位于第一象限
②保证x>y,否则交换,结果根据arctan(y/x)+arctan(x/y)=π/2得出
if(x < 0)
{
x = -x;
flag |= 1<<0;
}
if(y < 0)
{
y = -y;
flag |= 1<<1;
}
if(y > x)
{
tmp = y;
y = x;
x = tmp;
flag |= 1<<2;
}(2)防溢出处理
不能直接将x、y用于计算,否则后面的乘法过程可能会超出int32变量的范围。
/* 限制范围在uint16范围内,后续乘法不会超过uint32范围,防止溢出 */
_y = ((y << DEPTH)-1)/x; //前面保证x>y,所以这里_y<65535
_x = (1<<DEPTH)-1; //即为1(3)CORDIC迭代计算
/* 迭代计算 */
int x_tan,y_tan,_y,_x;
uint16_t *ptan = (uint16_t *)&_tan; //指针访问比数组访问快
uint32_t *pang = (uint32_t *)&_angle;
uint32_t res = 0;
for(i=0; i<DEPTH ;i++)
{
//由于x_tan和y_tan有正有负,设置为int类型,但最大值为31位,故前面的tan用Q15来表示
x_tan = (_x * (*ptan)) >> DEP_SHIFT; //Q15的tan * Q16的用户输入,计算后要右移Q15
y_tan = (_y * (*ptan++)) >> DEP_SHIFT;
if(_y > 0)
{
_x += y_tan;
_y -= x_tan;
res += *pang++;
}else
{
_x -= y_tan;
_y += x_tan;
res -= *pang++;
}
}(4)角度还原
前面把所有的角度都转化为[0°,45°]范围内,这里要转化回去,输出[0°,360°]范围的角度
if(flag & 0x04)
{
switch(flag)
{
case 7:
res = 270 * ANG_MUL - res;
break;
case 4:
res = 90 * ANG_MUL - res;
break;
case 5:
res = 90 * ANG_MUL + res;
break;
case 6:
res = 270 * ANG_MUL + res;
break;
}
}else
{
switch(flag)
{
case 0:
break;
case 1:
res = 180 * ANG_MUL - res;
break;
case 2:
res = 360 * ANG_MUL - res;
break;
case 3:
res = 180 * ANG_MUL + res;
break;
}
}最终的结果除以ANG_AMP,即为精度为ANG_PRECICE的角度值。



















 1667
1667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











