







 文章讲述了在RobotOperatingSystem(ROS)中,如何使用`
文章讲述了在RobotOperatingSystem(ROS)中,如何使用`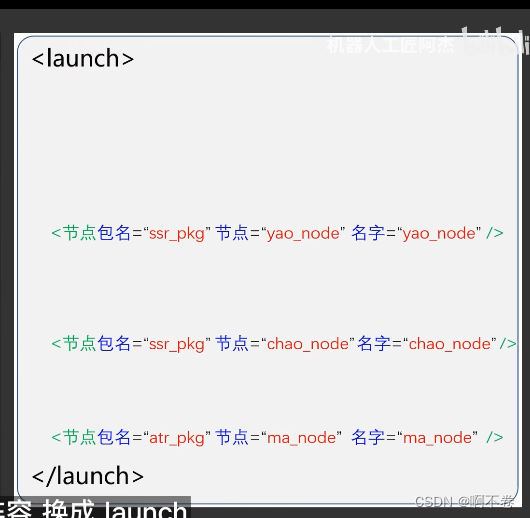
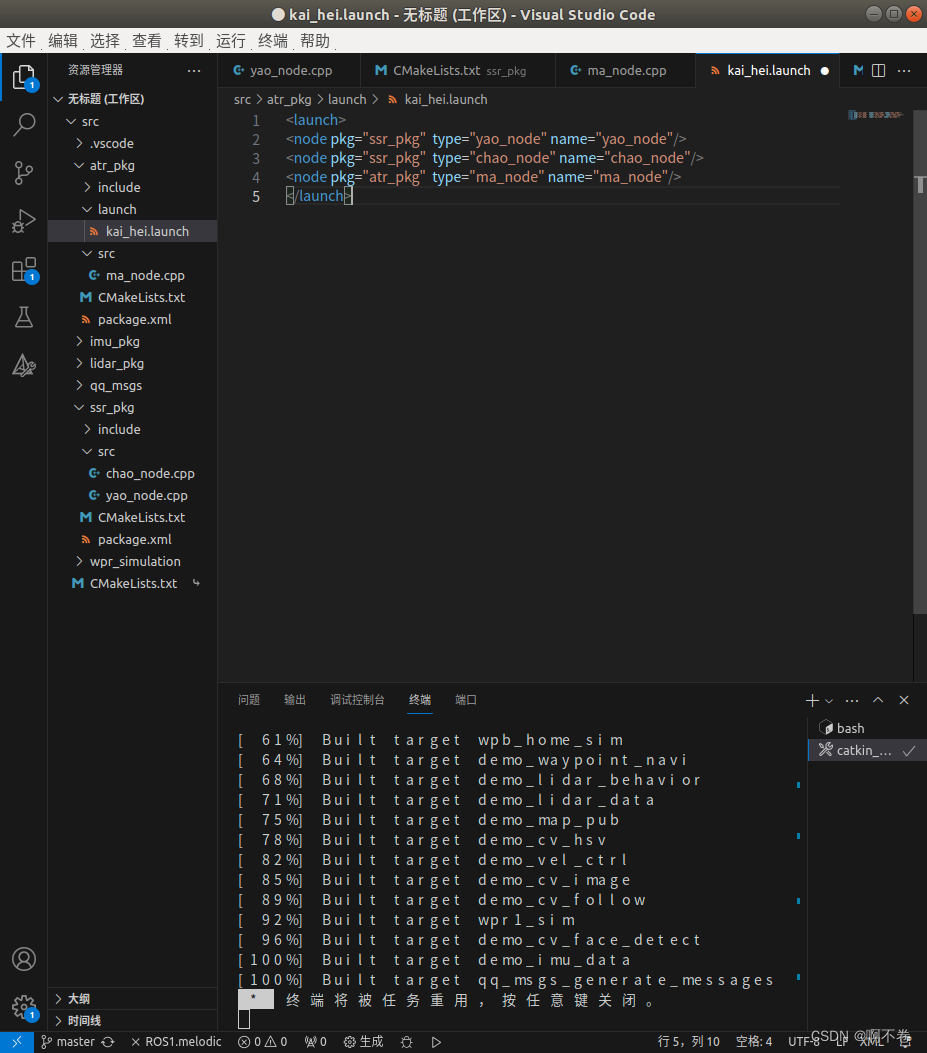
<launch>
<node pkg="ssr_pkg" type="yao_node" name="yao_node"/>
<node pkg="ssr_pkg" type="chao_node" name="chao_node"/>
<node pkg="atr_pkg" type="ma_node" name="ma_node"/>
</launch>

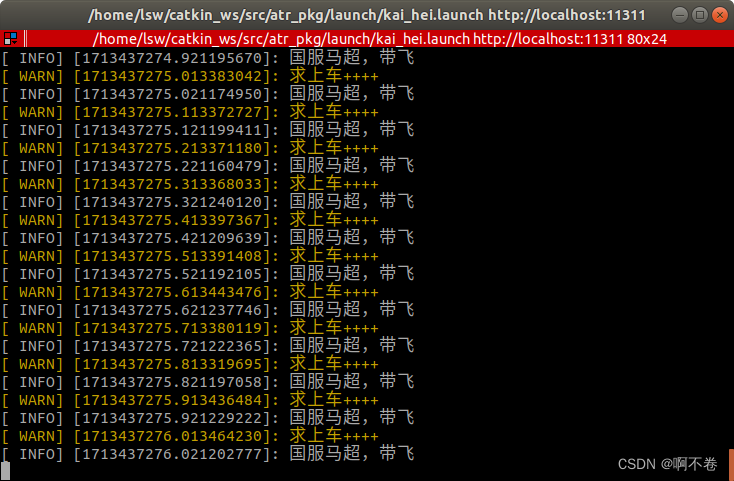
问题只有一个话题内容
解决方案
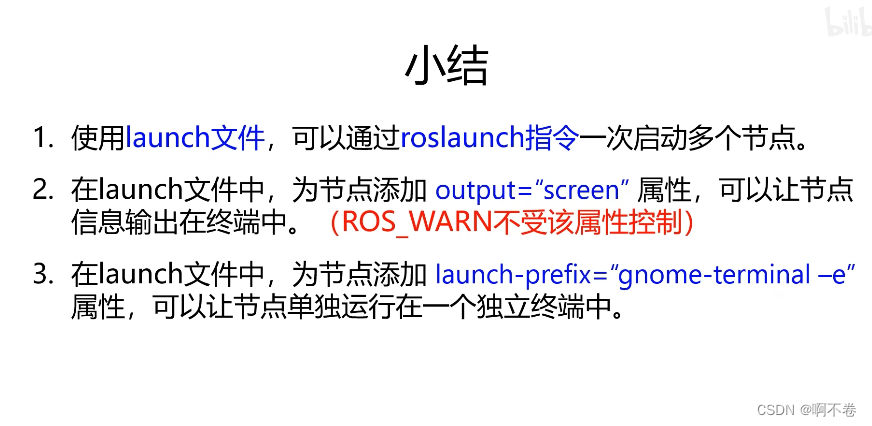
<node pkg="atr_pkg" type="ma_node" name="ma_node" output="screen"/>
<launch>
<node pkg="ssr_pkg" type="yao_node" name="yao_node"/>
<node pkg="ssr_pkg" type="chao_node" name="chao_node"/>
<node pkg="atr_pkg" type="ma_node" name="ma_node" output="screen"/>
</launch>
单独调试单独输出一个窗口
<node pkg="ssr_pkg" type="chao_node" name="chao_node" launch-prefix="gnome-terminal -e"/>
<launch>
<node pkg="ssr_pkg" type="yao_node" name="yao_node"/>
<node pkg="ssr_pkg" type="chao_node" name="chao_node" launch-prefix="gnome-terminal -e"/>
<node pkg="atr_pkg" type="ma_node" name="ma_node" output="screen"/>
</launch>















 2930
2930











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









