







 本文深入探讨了计算机图形学中的图形管线,包括顶点处理中的坐标变换和剔除,光栅化过程中的直线和三角形处理,片段处理中的抗锯齿、着色与纹理映射,以及混合阶段的深度测试。通过这些步骤,3D模型被转换成2D图像并显示在屏幕上,其中光栅化和片段处理是关键环节。
本文深入探讨了计算机图形学中的图形管线,包括顶点处理中的坐标变换和剔除,光栅化过程中的直线和三角形处理,片段处理中的抗锯齿、着色与纹理映射,以及混合阶段的深度测试。通过这些步骤,3D模型被转换成2D图像并显示在屏幕上,其中光栅化和片段处理是关键环节。
图形管线是目前使用最为广泛的渲染方式。
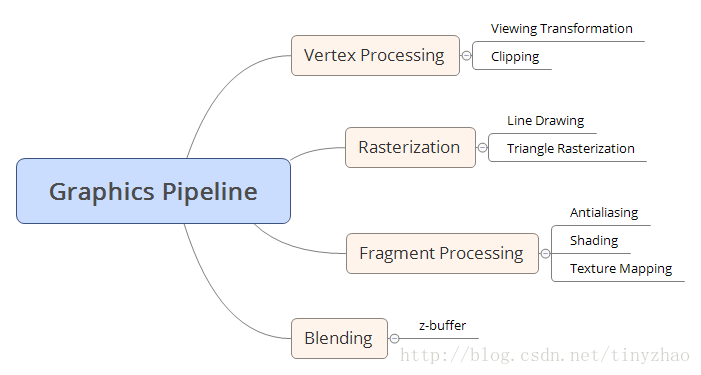
图形管线
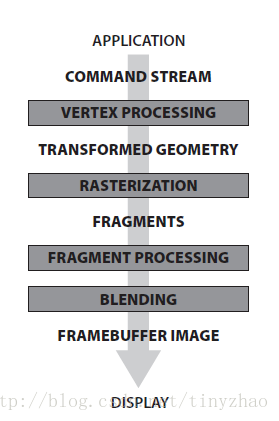
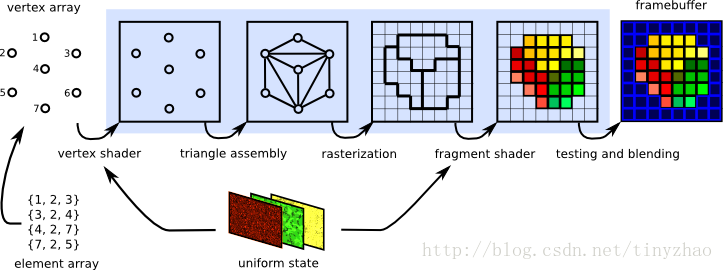
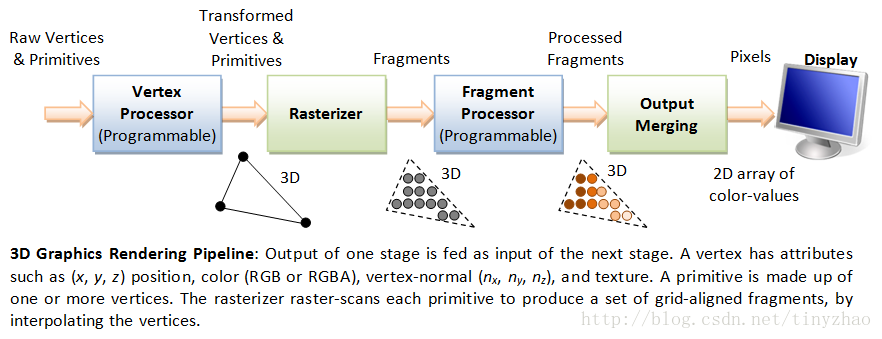
图形管线中,顶点处理将3D的顶点转换到屏幕2D空间上,光栅化寻找每个图元对应的像素生成未着色的片段(fragments),片段处理步骤将每个片段着色,最后混合每个片段生成最终显示的图像。
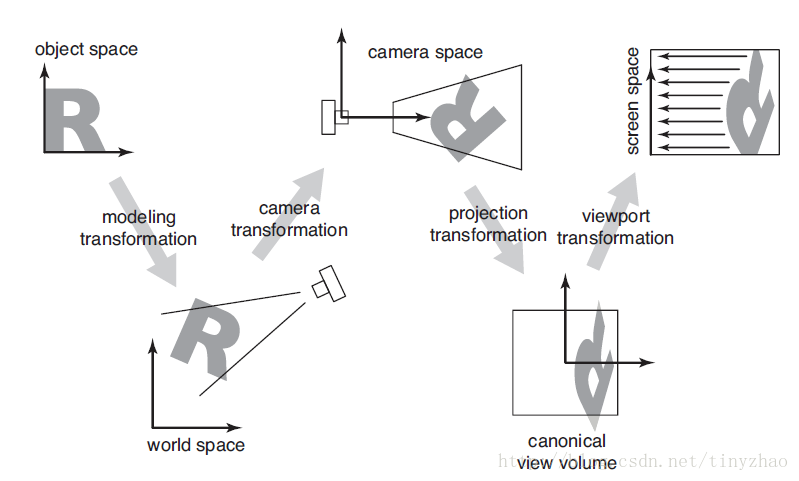
更形象的几张图用来帮助理解,从中可以看到每一个操作的输入和输出。
顶点处理
在顶点处理中,主要用到的技术是坐标变换。
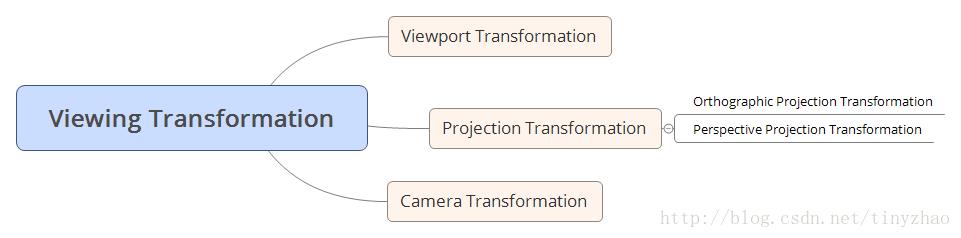
经过多次坐标变化,物体从世界坐标系中最终变换到2D的屏幕上。
其间,还需要剔除视野之外的物体。
光栅化
屏幕是像素点阵组成,而变换得到的屏幕空间仍然是连续的。光栅化就是将连续空间分配到每个离散像素的过程。
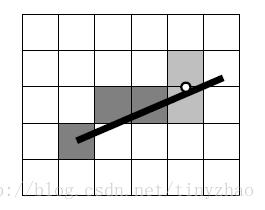
直线
对于直线来说,根据像素中点决定哪个像素在直线上:
三角形
对于三角形,使用质心坐标系计算每个像素的 (α,β
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4698
4698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









