







运动学与动力学
单腿运动学
正运动学
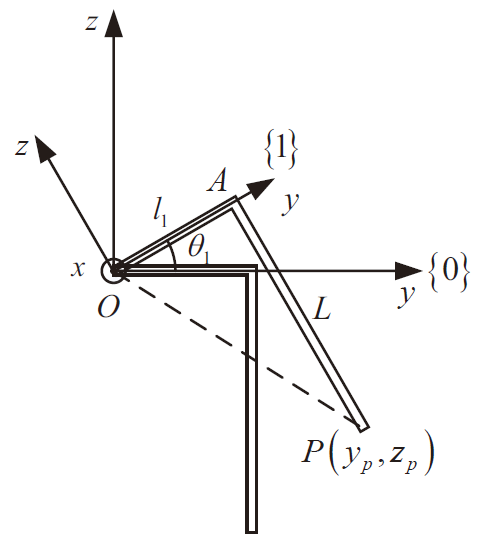
目标:已知三个关节的角度 (𝜃1,𝜃2,𝜃3) ,需要求出足端位置 (𝑥,𝑦,𝑧)
𝑇01=[rot𝑥(𝜃1)03×103×31]=[10000cos(𝜃1)−sin(𝜃1)00sin(𝜃1)cos(𝜃1)00001]𝑇12=[rot𝑦(𝜃2)03×103×31]=[cos(𝜃2)0sin(𝜃2)00100−sin(𝜃2)0cos(𝜃2)00001]𝑇23=[rot𝑦(𝜃3)[0𝑙1𝑙2]03×31]=[cos(𝜃3)0sin(𝜃3)0010𝑙1−sin(𝜃3)0cos(𝜃3)𝑙20001]𝑙1={−𝑙𝑎𝑏𝑎𝑑,right𝑙𝑎𝑏𝑎𝑑,left𝑙2=−𝑙ℎ𝑖𝑝𝑝3=[00𝑙31]𝑙3=−𝑙𝑘𝑛𝑒𝑒
根据以上变换即可求出足端位置:
(1)[𝑥𝑝𝑦𝑝𝑧𝑝1]=[𝑙3sin(𝜃1+𝜃2)+𝑙2sin(𝜃2)−𝑙3sin(𝜃1)cos(𝜃2+𝜃3)+𝑙1cos(𝜃1)−𝑙2cos(𝜃2)sin(𝜃1)𝑙3cos(𝜃1)cos(𝜃2+𝜃3)+𝑙1sin(𝜃1)+𝑙2cos(𝜃1)cos(𝜃2)1]
逆运动学
目标:已知足端位置 (𝑥,𝑦,𝑧) ,需要求出三个关节的角度 (𝜃1,𝜃2,𝜃3)
-
求 𝜃1
𝑃0=𝑅01𝑃1[𝑦𝑝𝑧𝑝]=[cos(𝜃1)−sin(𝜃1)sin(𝜃1)cos(𝜃1)][𝐿−𝐿]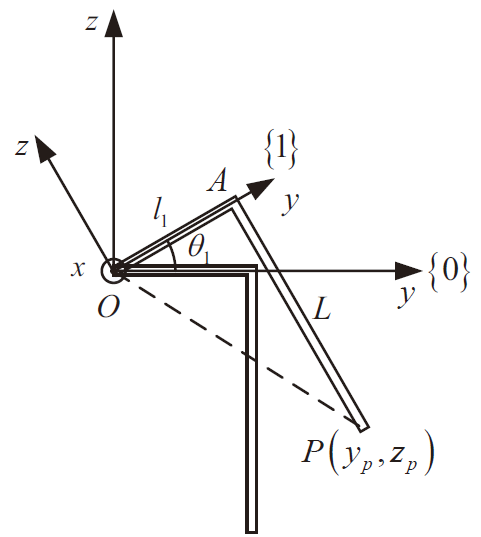
整理得
{𝑦𝑝=𝑙1cos(𝜃1)+𝐿sin(𝜃1)𝑧𝑝=𝑙1sin(𝜃1)−𝐿cos(𝜃1)⇒{𝑦𝑝cos(𝜃1)=𝑙1+𝐿tan(𝜃1)𝑧𝑝cos(𝜃1)=𝑙1tan(𝜃1)−𝐿由于 𝑧𝑝≠0 ,可以推出 𝑦𝑝𝑧𝑝=𝑙1+𝐿tan(𝜃1)𝑙1tan(𝜃1)−𝐿 ,从而可以解出 tan(𝜃1)=𝑧𝑝𝑙1+𝑦𝑝𝐿𝑦𝑝𝑙1−𝑧𝑝𝐿 ,即 𝜃1=arctan(𝑧𝑝𝑙1+𝑦𝑝𝐿𝑦𝑝𝑙1−𝑧𝑝𝐿)
-
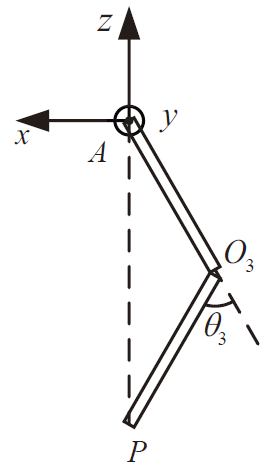
求 𝜃3 (余弦定理)
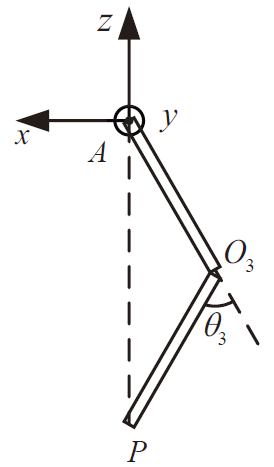
从图中可以得
其中∠𝐴𝑂3𝑃=arccos(|𝑂3𝐴→|2+|𝑂3𝑃→|2−|𝐴𝑃→|22|𝑂3𝐴→||𝑂3𝑃→|)其中{|𝐴𝑃→|=𝑥𝑝2+𝑦𝑝2+𝑧𝑝2−𝑙12|𝑂3𝐴→|=𝑙2|𝑂3𝑃→|=𝑙3=arccos((𝑙1+𝑙2+𝑙3)−(𝑥𝑝2+𝑦𝑝2+𝑧𝑝2)2𝑙2𝑙3)则可求出 |𝜃3|=𝜋−∠𝐴𝑂3𝑃 ,选定逆时针为正,则 𝜃3=|𝜃3|
-
求 𝜃2
由前文的正运动学公式 (1) 可得:
{𝑥𝑝=(𝑙3cos𝜃3+𝑙2)sin𝜃2+𝑙3sin𝜃3cos𝜃2𝑦𝑝=−𝑙3sin𝜃1cos(𝜃2+𝜃3)+𝑙1cos𝜃1−𝑙2cos𝜃2sin𝜃1𝑧𝑝=𝑙3cos𝜃1cos(𝜃2+𝜃3)+𝑙1sin𝜃1+𝑙2cos𝜃1cos𝜃2可以求出
(1)𝑦𝑝sin𝜃1−𝑧𝑝cos𝜃1=−𝑙3cos(𝜃2+𝜃3)(sin2𝜃1+cos2𝜃1)−𝑙2cos𝜃2(sin2𝜃1+cos2𝜃1)(2)=𝑙3sin𝜃3sin𝜃2−(𝑙3cos𝜃3+𝑙2)cos𝜃2同除 𝑥𝑝
𝑦𝑝sin𝜃1−𝑧𝑝cos𝜃1𝑥𝑝=𝑙3sin𝜃3sin𝜃2−(𝑙3cos𝜃3+𝑙2)cos𝜃2(𝑙3cos𝜃3+𝑙2)sin𝜃2+𝑙3sin𝜃3cos𝜃2令 {𝑎1=𝑦𝑝sin𝜃1−𝑧𝑝cos𝜃1𝑎2=𝑥𝑝𝑚1=𝑙3sin𝜃3𝑚2=𝑙3cos𝜃3+𝑙2 ,上式可以表示为:
𝑎1𝑎2=𝑚1sin𝜃2−𝑚2cos𝜃2𝑚1cos𝜃2+𝑚2sin𝜃2=𝑚1tan𝜃2−𝑚2𝑚1+𝑚2tan𝜃2同除 cos(𝜃2) 可以解得:
tan(𝜃2)=𝑎1𝑚1+𝑎2𝑚2𝑎2𝑚1−𝑎1𝑚2即可求出 𝜃2 :
𝜃2=arctan(𝑎1𝑚1+𝑎2𝑚2𝑎2𝑚1−𝑎1𝑚2)
至此完成逆运动学求解。
雅可比矩阵
对前文的正运动学公式 (1) 求导:
{𝑥˙𝑝=0⋅𝜃˙1+(𝑙3cos(𝜃2+𝜃3)+𝑙2cos𝜃2)⋅𝜃˙2+𝑙3cos(𝜃2+𝜃3)⋅𝜃˙3𝑦˙𝑝=(−𝑙1sin𝜃1−𝑙2cos𝜃1cos𝜃2−𝑙3cos𝜃1cos(𝜃2+𝜃3))⋅𝜃˙1+(𝑙2sin𝜃1sin𝜃2+𝑙3sin𝜃1sin(𝜃2+𝜃3))⋅𝜃˙2+𝑙3sin𝜃1sin(𝜃2+𝜃3)⋅𝜃˙3𝑧˙𝑝=(𝑙1cos𝜃1−𝑙2sin𝜃1cos𝜃2−𝑙3sin𝜃1cos(𝜃2+𝜃3))⋅𝜃˙1+(−𝑙2cos𝜃1sin𝜃2−𝑙3cos𝜃1sin(𝜃2+𝜃3))⋅𝜃˙2+(−𝑙3cos𝜃1sin(𝜃2+𝜃3))⋅𝜃˙3
整理成矩阵形式:
(2)[𝑥˙𝑝𝑦˙𝑝𝑧˙𝑝]=[𝐽11𝐽12𝐽13𝐽21𝐽22𝐽23𝐽31𝐽32𝐽33]⋅[𝜃˙1𝜃˙2𝜃˙3]=𝐽⋅[𝜃¨1𝜃˙2𝜃˙3]
对其求逆即可得到逆雅可比
(3)[𝜃1˙𝜃2˙𝜃3˙]=𝐽−1[𝑥˙𝑝𝑦˙𝑝𝑧˙𝑝]
单腿静力学
当机器人腿部静止于地面,其关节力矩 𝜏=[𝜏1𝜏2𝜏3] ,足端对地面的作用力 𝐹=[𝐹𝑥𝐹𝑦𝐹𝑧]
可以得到其关系
𝜏1𝜃1˙+𝜏2𝜃2˙+𝜏3𝜃3˙=𝐹𝑥𝑥𝑝˙+𝐹𝑦𝑦𝑝˙+𝐹𝑧𝑧𝑝˙
整理成矩阵形式
[𝜏1𝜏2𝜏3][𝜃˙1𝜃˙2𝜃˙3]=[𝐹𝑥𝐹𝑦𝐹𝑧][𝑥˙𝑝𝑦˙𝑝𝑧˙𝑝]𝜏𝑇⋅𝜃˙=𝐹𝑇⋅𝐽⋅𝜃˙
则可以得到:
𝜏=𝐽𝑇⋅𝐹
同样也可以通过关节力矩得到足端对地面的力
𝐹=𝐽−𝑇⋅𝜏
地面对足端的力 𝐹′=−𝐹
四足运动学
改变姿态
目标:已知机身姿态,求关节角度
令足端静止在地面上,将右前腿 𝑃0 点设为世界坐标系 {𝑠} 的原点,则 𝑝𝑠𝑖 为常量
当 {𝑠} 和 {𝑏} 平行,此时 𝑅𝑠𝑏=𝐼 ,可以得到四条腿相对于世界坐标系的位置:
𝑝𝑠𝑖=𝑅𝑠𝑏⋅[𝑝𝑏𝑖(0)−𝑝𝑏0(0)]=𝐼⋅[𝑝𝑏𝑖(0)−𝑝𝑏0(0)]=𝑝𝑏𝑖(0)−𝑝𝑏0(0)
在初始状态下,世界坐标系到机身坐标系的齐次变换矩阵为
𝑇𝑠𝑏(0)=[𝑅𝑠𝑏𝑂𝑠01×31]=[𝐼3−𝑝𝑏0(0)01×30]
此时改变机身姿态,将其分解为平移与旋转 平移旋转{平移𝑝𝑑旋转𝑟𝑝𝑦(𝛼𝛽𝛾)
𝑇𝑠𝑏=[𝑅𝑧(𝛼)𝑅𝑦(𝛽)𝑅𝑥(𝛾)−𝑝𝑏0(0)+𝑝𝑑01×31]
即可求出机身坐标系下的足端坐标
𝑝𝑏𝑖=𝑇𝑏𝑠⋅𝑝𝑠𝑖=𝑇𝑠𝑏−1⋅𝑝𝑠𝑖
经过平移可以得到机器人单腿坐标系下的足端坐标,通过运动学逆解可以得到关节角度。
足端速度
足端速度由两方面叠加产生
- 关节转动产生的足端速度,利用雅可比矩阵可以求得: 𝑣𝑏𝑗=𝐽𝜃˙
- 机身移动或旋转产生的足端速度: 𝑣𝑏𝑒 ,此项待求
首先考虑刚体上一点的速度与加速度。在刚体平移或转动时,对于刚体上位置为 𝑝 的质点𝑃 ,只考虑平移不考虑旋转,即只需要研究速度 𝑝˙ 与加速度 𝑝¨ 。
设刚体在 {𝑏} 中的平移速度为 𝑣𝑏 、旋转速度为 𝜔𝑏 ,即原点 𝑝𝑂 的平移速度为 𝑣𝑏 。刚体上位于 𝑝𝑃 的质点以 𝑣𝑏 平移,以 𝜔𝑏 绕 𝑝𝑂 旋转,则:
𝑝˙𝑃=𝑣𝑏+𝑤𝑏×(𝑝𝑃−𝑝𝑂)=𝑣𝑏+[𝑤𝑏]×(𝑝𝑃−𝑝𝑂)
对等式两边求导可得:
其中𝑝¨𝑃=𝑣˙𝑏+[𝜔˙𝑏]×(𝑝𝑃−𝑝𝑂)+[𝜔𝑏]×(𝑝˙𝑃−𝑝˙𝑂)其中 𝑝˙𝑂=𝑣𝑏=𝑣˙𝑏+[𝜔𝑏]×(𝑝𝑃−𝑝𝑂)+[𝜔𝑏]×[𝜔𝑏]×(𝑝𝑃−𝑝𝑂)
当前时刻原点与 {𝑏} 重合,𝑝𝑂=0 ,则:
(4)𝑝˙𝑃=𝑣𝑏+[𝜔𝑏]×𝑝𝑃𝑝¨𝑃=𝑣˙𝑏+[𝜔˙𝑏]×𝑝𝑃+[𝜔𝑏]×[𝜔𝑏]×𝑝𝑃
将机器人视为刚体,足端牵连速度为:(式中的bfB代表:{b}下feet2body)
𝑣𝑏𝑒=𝑣𝑏+[𝜔𝑏]×𝑝𝑏𝑓𝐵
结合开头的叠加, {𝑠} 下足端的速度可以表示为:
𝑣𝑠𝑓=𝑅𝑠𝑏(𝑣𝑏𝑒+𝑣𝑏𝑗)=𝑅𝑠𝑏𝑣𝑏+𝑅𝑠𝑏[𝜔𝑏]×𝑝𝑏𝑓𝐵+𝐽𝜃˙)=𝑣𝑠+𝑅𝑠𝑏([𝜔𝑏]×𝑝𝑏𝑓𝐵+𝐽𝜃˙)
但式中的 𝑣𝑠 无法测得。
{𝑠} 下足端相对于机身的速度可以表示为:
(5)𝑣𝑠𝑓𝐵=𝑣𝑠𝑓−𝑣𝑠=𝑅𝑠𝑏([𝜔𝑏]×𝑝𝑏𝑓𝐵+𝐽𝜃˙)
四足动力学
单刚体动力学
对于密度 𝜌(𝑥,𝑦,𝑧) ,质量 𝑚=∫𝑧∫𝑦∫𝑥𝜌(𝑥,𝑦,𝑧)d𝑥d𝑦d𝑧=∫𝐵𝜌d𝑉 的单刚体,将物体坐标系 {𝑏} 建在重心上,则 ∫𝐵𝜌𝑝𝑏d𝑉=03×1 , ∫𝐵𝜌[𝑝𝑏]d𝑉=03×3 。
根据牛二定律 𝐹=𝑚𝑎 与式 (4) ,可以求出重心处所受的合外力 𝑓𝑏 :
𝑓𝑏=∫𝐵𝜌𝑝¨𝑏d𝑉=∫𝐵𝜌(𝑣˙𝑏+[𝜔˙𝑏]×𝑝𝑏+[𝜔𝑏]×[𝜔𝑏]×𝑝𝑏)d𝑉
提取常量 𝑣𝑏 和 𝜔𝑏 :
𝑓𝑏=𝑣˙𝑏∫𝐵𝜌d𝑉+[𝜔˙𝑏]×∫𝐵𝜌𝑝𝑏𝑑𝑉+[𝜔𝑏]×[𝜔𝑏]×∫𝐵𝜌𝑝𝑏d𝑉
第一项中的 ∫𝐵𝜌d𝑉=𝑚 , ∫𝐵𝜌𝑝𝑏𝑑𝑉=0 ,则上式整理为:
(6)𝑓𝑏=𝑚𝑣˙𝑏
计算重心处的合外力矩(力矩的计算公式为 𝑀=𝑝×𝑓 ):
①②③𝑀𝑏=∫𝐵[𝑝𝑏]×d𝑓=∫𝐵[𝑝𝑏]×𝜌𝑝¨𝑏d𝑉=∫𝐵𝜌[𝑝𝑏]×d𝑉⋅𝑣˙𝑏―①+∫𝐵𝜌[𝑝𝑏]×[𝜔˙𝑏]×𝑝𝑏d𝑉―②+∫𝐵𝜌[𝑝𝑏]×[𝜔𝑏]×[𝜔𝑏]×𝑝𝑏d𝑉―③
分开看这三项:
-
对于式①:
∫𝐵𝜌[𝑝𝑏]×d𝑉=0 -
对于式②:( 𝑎×𝑏=−𝑏×𝑎 )
∫𝐵𝜌[𝑝𝑏]×[𝜔˙𝑏]×𝑝𝑏d𝑉=−∫𝐵𝜌[𝑝𝑏]×[𝑝𝑏]×𝜔˙𝑏d𝑉=(−∫𝐵𝜌[𝑝𝑏]×[𝑝𝑏]×d𝑉)―⋅𝜔˙𝑏=𝐼𝑏―𝜔˙𝑏定义刚体惯性张量 𝐼𝑏=−∫𝐵𝜌[𝑝𝑏]×[𝑝𝑏]×d𝑉
-
对于式③:( [𝑎]×[𝑏]×𝑐=(𝑎𝑇𝑐)𝑏−(𝑎𝑇𝑏)𝑐 , 𝑎×𝑎=[𝑎]×𝑎=0 )
∫𝐵𝜌[𝑝𝑏]×[𝜔𝑏]×𝑝𝑏d𝑉=∫𝐵𝜌[𝑝𝑏]×[(𝜔𝑏𝑇𝑝𝑏)𝜔𝑏−(𝜔𝑏𝑇𝜔𝑏)𝑝𝑏]d𝑉=∫𝐵𝜌[(𝜔𝑏𝑇𝑝𝑏)[𝑝𝑏]×𝜔𝑏−(𝜔𝑏𝑇𝜔𝑏)[𝑝𝑏]×𝑝𝑏]d𝑉=∫𝐵𝜌[(𝜔𝑏𝑇𝑝𝑏)[𝑝𝑏]×𝜔𝑏−0]d𝑉=−∫𝐵𝜌[(𝜔𝑏𝑇𝑝𝑏)[𝜔𝑏]×𝑝𝑏−0]d𝑉=−∫𝐵𝜌[(𝜔𝑏+𝑝𝑏)[𝜔𝑏]×𝑝𝑏−(𝑝𝑏𝑇𝑝𝑏)[𝜔𝑏]×𝜔𝑏]d𝑉=−∫𝐵𝜌[𝜔𝑏]×[(𝜔𝑏𝑇𝑝𝑏)𝑝𝑏−(𝑝𝑏𝑇𝑝𝑏)𝜔𝑏]d𝑉=−∫𝐵𝜌[𝜔𝑏]×[𝑝𝑏]×[𝑝𝑏]×𝜔𝑏d𝑉=[𝜔𝑏]×(−∫𝐵𝜌[𝑝𝑏]×[𝑝𝑏]×d𝑉―)𝜔𝑏=[𝜔𝑏]×𝐼𝑏―𝜔𝑏倒数第二项的下划线部分即为惯性张量。
综上可以得到旋转刚体的欧拉方程:
(7)𝑀𝑏=𝐼𝑏𝜔˙𝑏+[𝜔𝑏]×𝐼𝑏𝜔𝑏
上式中的惯性张量:
𝐼𝑏=−∫𝐵𝜌[𝑝𝑏]×[𝑝𝑏]×d𝑉=−∫𝐵𝜌[0−𝑝𝑧𝑝𝑦𝑝𝑧0−𝑝𝑥−𝑝𝑦𝑝𝑥0][0−𝑝𝑧𝑝𝑦𝑝𝑧0−𝑝𝑥−𝑝𝑦𝑝𝑥0]d𝑉=∫𝐵𝜌[𝑝𝑦2+𝑝𝑧2−𝑝𝑥𝑝𝑦−𝑝𝑥𝑝𝑧−𝑝𝑥𝑝𝑦𝑝𝑥2+𝑝𝑧2−𝑝𝑦𝑝𝑧−𝑝𝑥𝑝𝑧−𝑝𝑦𝑝𝑧𝑝𝑥2+𝑝𝑦2]d𝑉=[𝐼𝑥𝑥𝐼𝑥𝑦𝐼𝑥𝑧𝐼𝑥𝑦𝐼𝑦𝑦𝐼𝑦𝑧𝐼𝑥𝑧𝐼𝑦𝑧𝐼𝑧𝑧]
即可以得到下面的结论。可以计算形状不规则、密度不均匀的物体。
{𝐼𝑥𝑥=∫𝐵𝜌(𝑝𝑦2+𝑝𝑧2)d𝑉𝐼𝑦𝑦=∫𝐵𝜌(𝑝𝑥2+𝑝𝑧2)d𝑉𝐼𝑧𝑧=∫𝐵𝜌(𝑝𝑥2+𝑝𝑦2)d𝑉𝐼𝑥𝑦=−∫𝐵𝜌𝑝𝑥𝑝𝑦d𝑉𝐼𝑥𝑧=−∫𝐵𝜌𝑝𝑥𝑝𝑧d𝑉𝐼𝑦𝑧=−∫𝐵𝜌𝑝𝑦𝑝𝑧d𝑉
例如对于长方体:
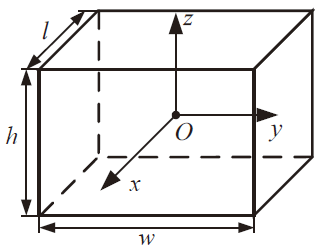
𝐼𝑏=112[𝑚(𝜔2+ℎ2)000𝑚(𝑙2+ℎ2)000𝑚(𝑙2+𝜔2)]
在机身坐标系中, 𝐼𝑏 为常量(只与形状、密度分布有关),刚体旋转后世界坐标系下的 𝐼𝑠 会改变。
单刚体动能
由式 (4) ,可以得到刚体整体的动能:( 𝑣𝑥2+𝑣𝑦2+𝑣𝑧2=𝑣𝑇𝑣 )
与有关①②③与有关④𝐾=∫𝐵12𝜌𝑣𝑇𝑣d𝑉=12∫𝐵𝜌(𝑣𝑏+[𝜔𝑏]×𝑝𝑏)𝑇(𝑣𝑏+[𝜔𝑏]×𝑝𝑏)d𝑉=12∫𝐵𝜌(𝑣𝑏𝑇+𝑝𝑏𝑇[𝜔𝑏]×𝑇)(𝑣𝑏+[𝜔𝑏]×𝑝𝑏)d𝑉=12∫𝐵𝜌𝑣𝑏𝑇𝑣𝑏―与𝑣𝑏有关d𝑉―①+12𝑣𝑏𝑇[𝜔𝑏]×∫𝐵𝜌𝑝𝑏d𝑉―0―②+12∫𝐵𝜌𝑝𝑏𝑇d𝑉―0[𝜔𝑏]×𝑇𝑣𝑏―③+12∫𝐵𝜌𝑝𝑏𝑇[𝜔𝑏]×𝑇[𝜔𝑏]×―与𝜔𝑏有关𝑝𝑏d𝑉―④
分开看这四项:
-
式②、③为0
-
式①与 𝑣𝑏 有关,定义为移动动能 𝐾𝑚
𝐾𝑚=12∫𝐵𝜌𝑣𝑏T𝑣𝑏d𝑉=12∫𝐵𝜌d𝑉𝑣𝑏T𝑣𝑏=12𝑚𝑣𝑏T𝑣𝑏 -
式③与 𝜔𝑏 有关,定义为转动动能 𝐾𝑡
𝐾𝑡=12∫𝐵𝜌𝑝𝑏𝑇[𝜔𝑏]×𝑇[𝜔𝑏]×𝑝𝑏d𝑉=−12∫𝐵𝜌𝑝𝑏𝑇[𝜔𝑏]×[𝜔𝑏]×𝑝𝑏d𝑉=−12∫𝐵𝜌𝑝𝑏𝑇[(𝜔𝑏𝑇𝑝𝑏)𝜔𝑏−(𝜔𝑏𝑇𝜔𝑏)𝑝𝑏]𝑑𝑉=−12∫𝐵𝜌[(𝜔𝑏𝑇𝑝𝑏)(𝑝𝑏𝑇𝜔𝑏)−(𝜔𝑏𝑇𝜔𝑏)(𝑝𝑏𝑇𝑝𝑏)]𝑑𝑉=−12∫𝐵𝜌[(𝑝𝑏𝑇𝜔𝑏)(𝜔𝑏𝑇𝑝𝑏)−(𝑝𝑏𝑇𝑝𝑏)(𝜔𝑏𝑇𝜔𝑏)]𝑑𝑉=−12∫𝐵𝜌𝜔𝑏𝑇[(𝑝𝑏𝑇𝜔𝑏)𝑝𝑏−(𝑝𝑏𝑇𝑝𝑏)𝜔𝑏]𝑑𝑉=12𝜔𝑏𝑇∫𝐵−𝜌[𝑝𝑏]×[𝑝𝑏]×𝜔𝑏𝑑𝑉=12𝜔𝑏𝑇𝐼𝑏𝜔𝑏在不同坐标系下,刚体的转动动能 𝐾𝑡 相等。又由 𝜔𝑏=𝑅𝑏𝑠𝜔𝑠 ,故:
𝐾𝑠𝑡=𝐾𝑏𝑡12𝜔𝑠T𝐼𝑠𝜔𝑠=12𝜔𝑏T𝐼𝑏𝜔𝑏𝜔𝑠T𝐼𝑠𝜔𝑠=(𝑅𝑏𝑠𝜔𝑠)T𝐼𝑏(𝑅𝑏𝑠𝜔𝑠)𝜔𝑠T𝐼𝑠𝜔𝑠=𝜔𝑠T(𝑅𝑠𝑏𝐼𝑏𝑅𝑠𝑏T)𝜔𝑠𝐼𝑠=𝑅𝑠𝑏𝐼𝑏𝑅𝑠𝑏T由此可以得到世界坐标系下刚体的惯性张量,这将在下一节中被用到。
四足动力学
目标:找到足端力与机器人运动的联系。
由式 (6) 和 (7) 可以得到:
{𝑓𝑏=𝑚𝑣˙𝑏𝑀𝑏=𝐼𝑏𝜔˙𝑏+[𝜔𝑏]×𝐼𝑏𝜔𝑏―
由于四足机器人运动时一般不会快速旋转,上式中 𝜔𝑏 很小,故划线部分可以忽略。则上式变为:
{𝑓𝑏=𝑚𝑣˙𝑏𝑀𝑏=𝐼𝑏𝜔˙𝑏
在世界坐标系中同样满足上式,即为:
{𝑓𝑠=𝑚𝑣˙𝑠𝑀𝑠=𝐼𝑠𝜔˙𝑠=𝑅sb𝐼𝑏𝑅sbT𝜔˙𝑠
其中,合外力 𝑓𝑠 由两部分组成:
- 重力 𝑚𝑔
- 足端力 𝑓𝑖𝑠
合力矩 𝑀𝑠 由两部分组成:
- 重力穿过重心,力矩为 0
- 足端力对重心的力矩 𝑝𝑔𝑖×𝑓𝑖𝑠=[𝑝𝑔𝑖]𝑓𝑖𝑠
则:
(8){𝑚𝑔+∑𝑖=03𝑓𝑖𝑠=𝑚𝑣˙𝑠∑𝑖=03[𝑝𝑖𝑔]×𝑓𝑖𝑠=𝑅𝑠𝑏𝐼𝑏𝑅𝑠𝑏T𝜔˙𝑠
整理成矩阵形式
[𝐼𝐼𝐼𝐼[𝑝𝑔0]×[𝑝𝑔1]×[𝑝𝑔2]×[𝑝𝑔3]×][𝑓𝑠0𝑓𝑠1𝑓𝑠2𝑓𝑠3]=[𝑚(𝑣˙𝑠−𝑔)𝑅𝑠𝑏𝐼𝑏𝑅𝑠𝑏T𝜔˙𝑠]
此时完成了足端力与机器人运动的联系。但此时无法获得机器人姿态 𝑅𝑠𝑏 ,且需要知道机器人在世界坐标系下的 𝑣𝑠 、 𝜔𝑠 。获取这些信息需要用到下一章的状态估计器。
状态估计器
状态估计器是四足机器人系统中比较重要的一环节,通过状态估计器可以获得四足机器人质心位姿(位置和姿态角)及速度。姿态角可根据IMU通过坐标变换得到;位置和速度需要使用最小二乘法或卡尔曼滤波器求得,最终将质心位姿和速度作为机械狗的MPC+WBC控制器及单刚体动力学的反馈输入,进而形成了整个系统的闭环控制。本章节分别介绍最小二乘估计和离散卡尔曼滤波器这两个优化方法。
最小二乘与卡尔曼滤波
在讲状态估计器之前有必要介绍一下最小二乘和卡尔曼滤波的关系。线性回归是一类问题的概念,而最小二乘估计、最小均方误差估计是参数估计方法,最小二乘法、Kalman、梯度下降都是参数优化方法。最小二乘是优化方法中的一种特殊情况,卡尔曼滤波是最小二乘法的一种特殊情况。 古典最小二乘中,假设了每一次测量的权重相同,但事实上这样并不合理,后来演化为加权最小二乘法,至此最小二乘估计所做的都是批处理(Batch),这样比较占内存,不符合动态系统状态估计的需要,即每一次更新输入时,都要从新计算之前所有的记录值。而后,提出递推最小二乘法,模型就不用每次都重新计算了。与递归最小二乘相似,卡尔曼滤波加入了系统内部变化的考虑。即利用process model对系统在下一时刻的状态进行预测。 当对于系统不够了解时,使用最小二乘法比较合适,而对于系统了解比较多时,可以采用Kalman滤波。改变量测噪声、系统噪声都会对Kalman滤波的效果产生影响,而不会对最小二乘滤波产生影响,而改变最小二乘的阶数会对其产生影响。
使用IMU获得姿态
使用IMU可以估计质心姿态。现有的IMU基本都可以返回四元数 𝑞=[𝑤𝑥𝑦𝑧] ,经过计算即可获得质心姿态角,其公式如下:
𝑅𝑠𝑏=[1−2𝑦2−2𝑧22𝑥𝑦−2𝑧𝑤2𝑥𝑧+2𝑦𝑤2𝑥𝑦+2𝑧𝑤1−2𝑥2−2𝑧22𝑦𝑧−2𝑥𝑤2𝑥𝑧−2𝑦𝑤2𝑦𝑧+2𝑥𝑤1−2𝑥2−2𝑦2]
当然,也可以通过旋转矩阵转成欧拉角(Roll、Pitch、Yaw):
Roll=arctan2(𝑅𝑠𝑏(3,2),𝑅𝑠𝑏(3,3))Pitch=arcsin(−𝑅𝑠𝑏(3,1))Yaw=arctan2(𝑅𝑠𝑏(2,1),𝑅𝑠𝑏(1,1))
在IMU的局部坐标系 {𝑏} 中:
𝑚𝑎=−𝑘𝑠+𝑚𝑅𝑏𝑠𝑔𝑠=𝑚𝑘(𝑅𝑏𝑠𝑔−𝑎)
上式中由于重力加速度 𝑔=[00\-9.8] 是世界坐标系下的,所以需要左乘旋转矩阵 𝑅𝑏𝑠 。则加速度计的读数为:
𝑎𝑏=𝑎𝑜𝑢𝑡=−𝑘𝑚𝑠=𝑎−𝑅𝑏𝑠𝑔=𝑎−𝑅𝑠𝑏T𝑔
上述公式建立了加速度计读数与质心姿态的关系,通过左乘旋转矩阵可以计算出IMU在 {𝑠} 坐标系下的加速度:
(9)𝑎𝑠=𝑅𝑠𝑏𝑎=𝑅𝑠𝑏𝑎𝑏+𝑅𝑠𝑏𝑅𝑠𝑏𝑇𝑔=𝑅𝑠𝑏𝑎𝑏+𝑔
状态空间模型
状态估计器需要一个描述四足机器人运动状态的状态空间模型。对于一个状态空间模型需要对其进行能控性和能观性的分析,来判断此学系统是否能够被输入所控制,但本文省略这一部分的内容。本章节先介绍连续状态空间模型,再推出离散状态空间模型。
连续状态空间模型
“连续”指的是时间连续、定常线性系统的状态空间模型:
(10){𝑥˙(𝑡)=𝐴𝑐𝑥(𝑡)+𝐵𝑐𝑢(𝑡)𝑦(𝑡)=𝐶𝑐𝑥(𝑡)
其中:
- 𝑥(𝑡) :状态向量
- 𝑢(𝑡) :控制向量
- 𝑦(𝑡) :输出向量
- 𝐴𝑐 :系统矩阵
- 𝐵𝑐 :输入矩阵
- 𝐶𝑐 :输出矩阵
则 𝑥 应为要估计的量, 𝑦 为能直接测量的量。
令机身加速度 𝑎𝑠 为系统输入量 𝑢 ,上式可变为标准形式:
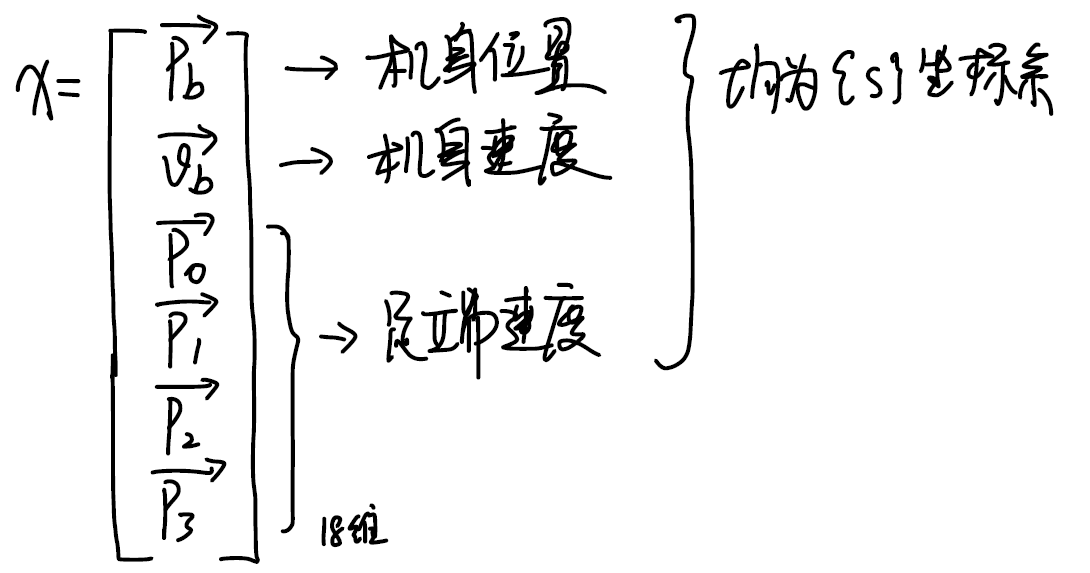
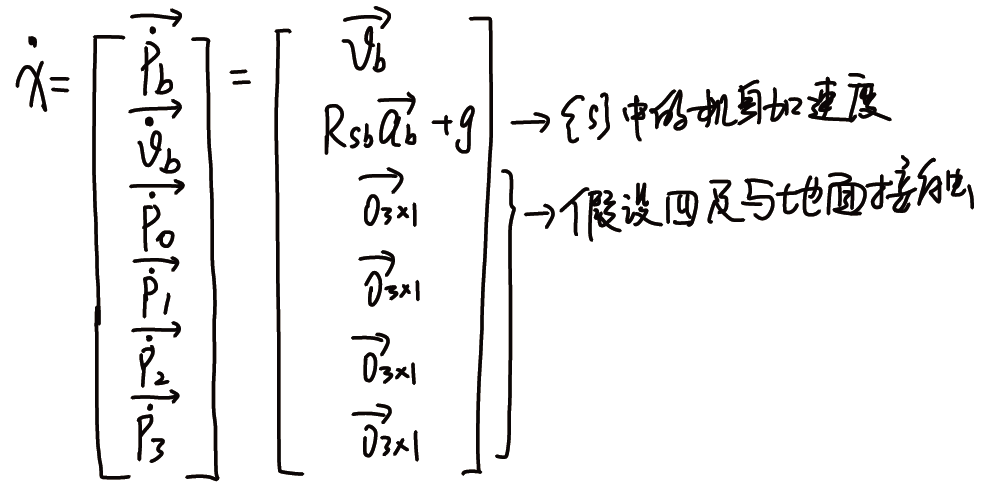
(11)𝑥˙=[03×3𝐼303×1203×1803×18]𝑥+[03×3𝐼303×3][𝑅𝑠𝑏𝑎𝑏+𝑔]
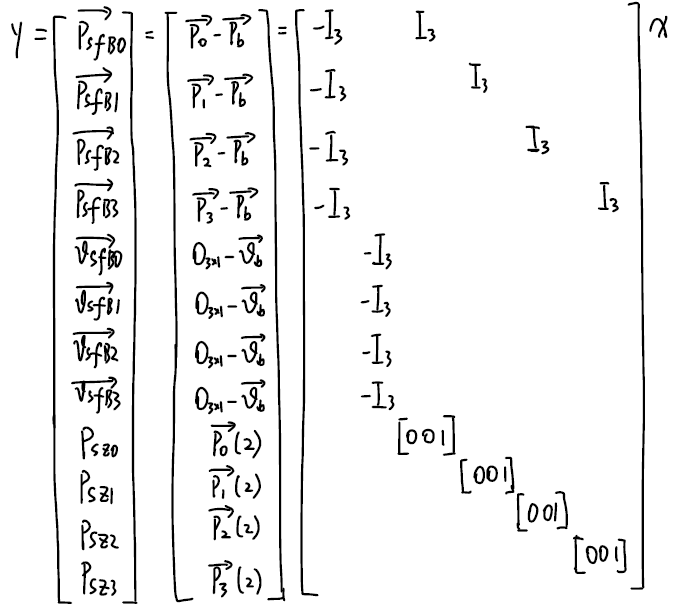
对于可测量的输出变量 𝑦 ,前文通过IMU可测得 {𝑠} 坐标系下的机身姿态 𝑅𝑠𝑏 ; {𝑏} 下的加速度 𝑎𝑏 、角速度 𝜔𝑏 ;通过正向运动学,可以求出 {𝑏} 坐标系下足端相对于机身的位置 𝑝𝑏𝑓𝐵 ,转换到 {𝑠} 坐标系下,即 𝑝𝑠𝑓𝐵=𝑅𝑠𝑏𝑝𝑏𝑓𝐵 (式12),即可写出输出变量:
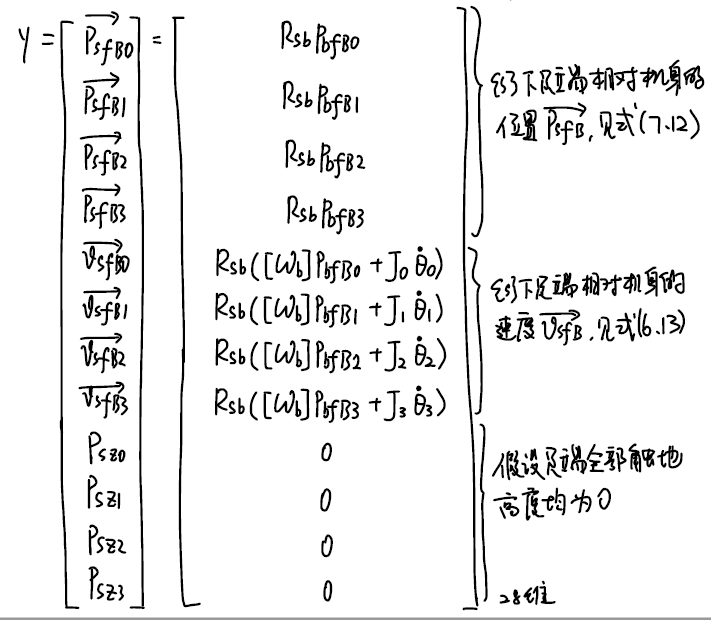
将其写成式 (10) 的标准形式:(式13)
离散状态空间模型
由于控制算法运行于计算机,需要对连续的状态空间模型离散化,使状态空间变量均为时间的函数。设采样时间间隔为 d𝑡 ,则:
𝑥˙(𝑘−1)=𝑥(𝑘)−𝑥(𝑘−1)𝑑𝑡⇒𝑥(𝑘)=𝑥(𝑘−1)+d𝑡𝑥˙(𝑘−1)
将式 (10) 带入
𝑥(𝑘)=𝑥(𝑘−1)+d𝑡(𝐴𝑐𝑥(𝑘−1)+𝐵𝑐𝑢(𝑘−1))=(𝐼+d𝑡𝐴𝑐)―𝑥(𝑘−1)+d𝑡𝐵𝑐―𝑢(𝑘−1)
则离散状态空间模型可以表示为:
其中{𝑥(𝑘)=𝐴𝑥(𝑘−1)+𝐵𝑢(𝑘−1)𝑦(𝑘)=𝐶𝑥(𝑘)其中{𝐴=𝐼+d𝑡𝐴𝑐𝐵=d𝑡𝐵𝑐𝐶=𝐶𝑐
最小二乘估计
输出向量 𝑦 的测量值中含有噪声向量 𝑣 ,假设状态向量 𝑥𝑘 为定值 𝑥 ,离散状态空间中的 𝑦 变为 𝑦𝑘=𝐶𝑥+𝑣𝑘 。假设测量噪声 𝑣∼(0,𝑅) ,其中 𝑅 为协方差矩阵, 𝑅=diag(𝜎12,𝜎22,…,𝜎𝑛2) 。需要在有噪声的情况下获得状态向量的最优估计值 𝑥^ 。
加权最小二乘估计
定义测量残差 𝜖𝑦=𝑦−𝐶𝑥^ 。根据各个传感器的误差方差定义为权重,方差越小权重越大。定义代价函数:
𝐽=𝜖𝑦12𝜎12+𝜖𝑦22𝜎22+⋯+𝜖𝑦𝑛2𝜎𝑛2=𝜖𝑦𝑇𝑅−1𝜖𝑦=(𝑦−𝐶𝑥^)𝑇𝑅−1(𝑦−𝐶𝑥^)=𝑦𝑇𝑅−1𝑦−𝑦𝑇𝑅−1𝐶𝑥^−𝑥^𝑇𝐶𝑇𝑅−1𝑦+𝑥^𝑇𝐶𝑇𝑅−1𝐶𝑥^
求 𝐽 的偏导数 𝜕𝐽𝜕𝑥^=−2𝑦𝑇𝑅−1𝐶+2𝑥^𝑇𝐶𝑇𝑅−1𝐶 ,令其为 0 ,可以计算出 𝑥^=(𝐶𝑇𝑅−1𝐶)−1𝐶𝑇𝑅−1𝑦 。
但此方法需要使用一段时间内所有的测量值 𝑦 ,其计算量及内存占用太大,故改用递推公式。
递推最小二乘估计
定义 𝑥^ 的递推公式:(其中 𝐾𝑘 为最优修正系数矩阵)
(13){𝑦𝑘=𝐶𝑥+𝑣𝑘𝑥^𝑘=𝑥^𝑘−1+𝐾𝑘(𝑦𝑘−𝐶𝑥^𝑘−1)
定义 𝑘 时刻的状态估计误差:
(14)𝜔𝑘=𝑥^−𝑥^𝑘=𝑥^−𝑥^𝑘−1−𝐾𝑘(𝑦𝑘−𝐶𝑥^𝑘−1)=𝜔𝑘−1−𝐾𝑘𝐶(𝑥−𝑥^𝑘−1)−𝐾𝑘𝑣𝑘=(𝐼−𝐾𝑘𝐶)𝜔𝑘−1−𝐾𝑘𝑣𝑘
再次使用二次规划,令 𝑘 时刻各状态估计误差方差和最小,则 𝑘 时刻的代价函数 𝐽𝑘 为:
𝐽𝑘=𝐸(𝜔𝑘12+𝜔𝑘22+⋯+𝜔𝑘𝑛2)=𝜎𝑘12+𝜎𝑘22+⋯+𝜎𝑘𝑛2=Tr(𝑃𝑘)
估计误差协方差 𝑃𝑘=𝐸(𝜔𝑘𝜔𝑘𝑇) ,将式 (14) 带入可以得到:
(15)𝑃𝑘=𝐸(𝜔𝑘𝜔𝑘𝑇)=(𝐼−𝐾𝑘𝐶)𝑃𝑘−1(𝐼−𝐾𝑘𝐶)𝑇+𝐾𝑘𝑅𝐾𝑘𝑇
目的为使 𝐽 最小,对其求偏导:
𝜕𝐽𝑘𝜕𝐾𝑘=2(𝐼−𝐾𝑘𝐶)𝑃𝑘−1(−𝐶𝑇)+2𝐾𝑘𝑅=0
解得最优的 𝐾𝑘 为:
(16)𝐾𝑘=𝑃𝑘−1𝐶𝑇(𝑅+𝐶𝑃𝑘−1𝐶𝑇)−1
最小二乘估计流程总结
- 确定初始状态的最优估计值 𝑥^0 和估计值的协方差 𝑃0 。如果对系统状态 𝑥 完全不了解,则可以将 𝑥^0 设为任意值,同时令 𝑃0=∞𝐼 ,表示无穷大的协方差,即完全不信任 𝑥^0 。
- 估计器运行开始,在 𝑘=1 时刻,机器人从各个传感器得到输出向量 𝑦1 ,并根据式 (16) 计算出当前时刻的最优修正系数矩阵 𝐾1=𝑃0𝐶𝑇(𝑅+𝐶𝑃0𝐶𝑇)−1 。根据式 (13) 可以计算出当前时刻的最优估计值 𝑥^1=𝑥^0+𝐾1(𝑦1−𝐶𝑥^0) 。根据式 (15) 可以计算出估计误差协方差 𝑃1=(𝐼−𝐾1𝐶)𝑃0(𝐼−𝐾1𝐶)𝑇+𝐾1𝑅𝐾1𝑇 。
- 当 𝑘=2,3,⋯ ,估计器重复第二步,估计值 𝑥^ 不断逼近真实状态 𝑥 。
过程噪声
前文假设状态向量为定值。若状态向量是变化的,增加过程噪声 𝑤 ,且其期望为0。则离散状态空间模型变为:
𝑥𝑘=𝐴𝑥𝑘−1+𝐵𝑢𝑘−1+𝑤
状态期望为:
𝑥𝑘―=𝐸(𝑥𝑘)=𝐴𝐸(𝑥𝑘−1)+𝐵𝐸(𝑢𝑘−1)+𝐸(𝑤𝑘−1―0)=𝐴𝑥―𝑘−1+𝐵𝑢―𝑘−1
状态向量 𝑥𝑘 的协方差为:( 𝑄=𝑤𝑤𝑇 为过程噪声协方差)
𝑃𝑘=𝐸[(𝑥𝑘−𝑥―𝑘)(𝑥𝑘−𝑥―𝑘)𝑇]=𝐴𝑃𝑘−1𝐴𝑇+𝑤𝑘−1𝑤𝑘−1𝑇=𝐴𝑃𝑘−1𝐴𝑇+𝑄―
扩展卡尔曼滤波器
最小二乘估计只能对固定状态 𝑥 进行估计,而扩展卡尔曼滤波器可以对变化的状态 𝑥𝑘 进行估计。
TODO
步态轨迹规划
落脚点的选取
平移
TODO 图
上图为四足机器人的一条腿从抬起到落下的过程,分区看图中的几个过程:
- ➂为中性落脚点
- ➀~➁阶段为摆动相,机器人速度为 𝑣𝑥 ,摆动时间为 𝑇𝑠𝑤𝑖𝑛𝑔 ,则 𝑑12=𝑣𝑥𝑇𝑠𝑤𝑖𝑛𝑔 。
- ➁~➃阶段为支撑相,机器人速度为 𝑣𝑥 ,触底时间为 𝑇𝑠𝑡𝑎𝑛𝑐𝑒 ,则 𝑑23=Δ𝑥=12𝑣𝑥𝑇𝑠𝑡𝑎𝑛𝑐𝑒 。
图中落脚点 𝑥𝑓=𝑥𝑏+𝑑12+𝑑23=𝑥𝑏+𝑣𝑥𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑥𝑇𝑠𝑡𝑎𝑛𝑐𝑒
设相位 𝑝𝑡=𝑡−𝑡0𝑡1−𝑡0 ,则落脚点变为 𝑥𝑓=𝑥𝑝(𝑝)+𝑣𝑥(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑥𝑇𝑠𝑡𝑎𝑛𝑐𝑒
若落脚点位于中性落脚点左侧,重力会对落脚点产生顺时针的力矩从而向右加速,所以若 𝑣𝑥<𝑣𝑥𝑑 ,则需左移落脚点。
{𝑥𝑓=𝑥𝑝(𝑝)+𝑣𝑥(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑥𝑇𝑠𝑡𝑎𝑛𝑐𝑒+𝑘𝑥(𝑣𝑥−𝑣𝑥𝑑)𝑦𝑓=𝑦𝑝(𝑝)+𝑣𝑦(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑦𝑇𝑠𝑡𝑎𝑛𝑐𝑒+𝑘𝑦(𝑣𝑦−𝑣𝑦𝑑)
旋转
𝜃𝑓=𝜃𝑝+𝜃0+𝜔(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝜔𝑇𝑠𝑡𝑎𝑛𝑐𝑒+𝑘𝜔(𝜔−𝜔𝑑)
则世界坐标系下的落脚点为
{𝑥𝑓=𝑅cos𝜃𝑓𝑦𝑓=𝑅sin𝜃𝑓
结合平移与旋转,落脚点坐标为:
{𝑥𝑖=𝑥𝑏+𝑅cos𝜃𝑓+𝑣𝑥(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑥𝑇𝑠𝑡𝑎𝑛𝑐𝑒+𝑘𝑥(𝑣𝑥−𝑣𝑥𝑑)𝑦𝑖=𝑦𝑏+𝑅sin𝜃𝑓+𝑣𝑦(1−𝑝)𝑇𝑠𝑤𝑖𝑛𝑔+12𝑣𝑦𝑇𝑠𝑡𝑎𝑛𝑐𝑒+𝑘𝑦(𝑣𝑦−𝑣𝑦𝑑)
MPC控制器
目标
通过MPC可以得到:
- 质心位置、速度、加速度、旋转角度、角速度
- 足底力
- 足端位置、速度、加速度
让机器狗质心跟踪最新的参考轨迹,计算未来一段时间内的足底力
简化单刚体动力学
下面考虑单刚体动力学:
𝑝¨=∑𝑖=1𝑛𝑓𝑖𝑚−𝑔𝑑𝑑𝑡(𝐼𝜔)=∑𝑖=1𝑛𝑟𝑖×𝑓𝑖
对上式其进行简化
-
𝑑𝑑𝑡(𝐼𝜔)=𝐼𝜔+𝜔×(𝐼𝜔)≈𝐼𝜔˙ ,其中 𝐼=𝑅𝐼𝑏𝑅𝑇≈𝑅𝑧(𝜓)𝐼𝑏𝑅𝑧𝑇(𝜓)
-
简化pitch和row
IMU获得的角速度为身体坐标系:
𝜔𝑠=𝑅𝑧(𝜓)𝑅𝑦(𝜃)𝑅𝑥(𝜙)𝜔𝑏𝜔𝑏=[𝑅𝑧(𝜓)𝑅𝑦(𝜃)𝑅𝑥(𝜙)]−1𝜔𝑠[𝜙˙𝜃˙𝜓˙]=[cos(𝜓)/cos(𝜃)sin(𝜓)/cos(𝜃)0−sin(𝜓)cos(𝜓)0cos(𝜓)tan(𝜃)sin(𝜓)tan(𝜃)1]𝜔在运动过程中机器人的pitch和row均接近于0,故可以忽略
[𝜙˙𝜃˙𝜓˙]=[cos(𝜓)sin(𝜓)0−sin(𝜓)cos(𝜓)0001]𝜔=𝑅𝑧𝑇(𝜓)𝜔
状态方程
下面写出状态方程:
-
状态变量
位置 𝑝=[𝑥𝑦𝑧] ,速度 𝑝˙=[𝑥˙𝑦˙𝑧˙] ,姿态角 𝛩=[𝜃𝜙𝜓] ,姿态角速度 𝜔=[𝜃˙𝜙˙𝜓˙] ,重力加速度 𝑔=[00−9.8] 。状态变量则为13维变量: 𝑥=[𝜃𝑝𝑤𝑝˙𝑔(3)] 。
-
控制变量
控制变量为12维变量: 𝑢=[𝑓1𝑓2𝑓3𝑓4] 。其中 𝑓𝑖 为足底力。
-
状态方程
{𝑥˙=𝐴𝑥+𝐵𝑢𝑦=𝐶𝑥+𝐷𝑢将各个已知量带入:
𝑑𝑑𝑡[𝜃𝑝𝜔𝑝˙𝑔(3)]=[03×303×3𝑅𝑧𝑇(𝜓)03×303×103×303×303×3𝐼303×103×303×303×303×303×103×303×303×303×3[001]01×301×301×301×31][𝜃𝑝𝜔𝑝˙𝑔(3)]+[03×303×303×303×303×303×303×303×3𝐼−1[𝑟1]×𝐼−1[𝑟2]×𝐼−1[𝑟3]×𝐼−1[𝑟4]×𝐼3/𝑚𝐼3/𝑚𝐼3/𝑚𝐼3/𝑚01×301×301×301×3][𝑓1𝑓2𝑓3𝑓4]要想写成代码,需要对其离散化。使用前向欧拉法离散化状态方程:
𝑥˙=𝑥𝑘+1−𝑥𝑘Δ𝑡=𝐴𝑥𝑘+𝐵𝑢𝑘𝑥𝑘+1=(𝐼+Δ𝑡𝐴)―+Δ𝑡𝐵―𝑢𝑘=𝐴―𝑥𝑘+𝐵―𝑢𝑘其中的 𝐴― 和 𝐵― 表示为:
𝐴―=[𝐼303×3𝑅𝑧𝑇(𝑑𝜓𝑘)Δ𝑇03×303×103×3𝐼303×3𝐼3Δ𝑇03×103×303×3𝐼303×303×103×303×303×3𝐼3[001]Δ𝑇01×301×301×301×31]𝐵―=[03×303×303×303×303×303×303×303×3𝐼𝑘−1[𝑟1𝑘]×Δ𝑇𝐼𝑘−1[𝑟2𝑘]×Δ𝑇𝐼𝑘−1[𝑟3𝑘]×Δ𝑇𝐼𝑘−1[𝑟4𝑘]×Δ𝑇𝐼3Δ𝑇/𝑚𝐼3Δ𝑇/𝑚𝐼3Δ𝑇/𝑚𝐼3Δ𝑇/𝑚01×301×301×301×3]
约束
MPC最大的优势就是可以对输入量和状态变量进行约束,所以可以对输入进行约束。输入约束可以分为以下两个约束条件:
-
足底反力
摆动时足底力为0,state=0, 𝑓𝑖=03×1
触地时最大足底力为 𝑓𝑚𝑎𝑥 ,state=1, 𝑓𝑖𝑧≤𝑓𝑚𝑎𝑥
-
摩擦锥
为保证足底与地面不滑动,足底反力的水平分量不能大于竖直分量 ×𝜇 ,即
|𝑓𝑖𝑥|≤𝜇𝑓𝑖𝑧|𝑓𝑖𝑦|≤𝜇𝑓𝑖𝑧𝑓𝑖𝑧>0
结合以上两个约束,可以得到总的输入约束:
[00000]≤[−10𝜇0−1𝜇10𝜇01𝜇001][𝑓𝑖𝑥𝑓𝑖𝑦𝑓𝑖𝑧]≤[+∞+∞+∞+∞𝑓max]
优化问题
首先建立代价函数(式中 𝑄 、 𝑅 为对角正定/半正定矩阵,需要对其进行调参)
误差加权和输入加权和min𝑥,𝑢∑𝑖=0𝐾−1‖𝑥𝑖+1−𝑥𝑖+𝑖,𝑟𝑒𝑓‖𝑄𝑖―误差加权和+‖𝑢𝑖‖𝑅𝑖―输入加权和
使其满足:
支撑相摆动相{𝑥𝑖+1=𝐴𝑖𝑥𝑖+𝐵𝑖𝑢𝑖,𝑖=0⋯𝑘−1𝑐𝑖―≤𝐶𝑖𝑢𝑖≤𝑐𝑖―,𝑖=0⋯𝑘−1(支撑相)𝐷𝑖𝑢𝑖=0,𝑖=0⋯𝑘−1(摆动相)
对其进行二次规划,化为qpOASES标准形式:
min𝑥12𝑥𝑇𝐻𝑥+𝑥𝑇𝑔(𝑤0)𝑠.𝑡.𝑙𝑏𝐴(𝜔0)≤𝐴𝑥≤𝑢𝑏𝐴(𝜔0)𝑙𝑏(𝜔0)≤𝑥≤𝑢𝑏(𝜔0)
预测步长为 𝑛 ,状态量 𝑋𝑘=[𝑥𝑘𝑘+1𝑥𝑘𝑘+2⋮𝑥𝑘𝑘+𝑛] ,输入量 𝑈𝑘=[𝑢𝑘𝑘𝑢𝑘𝑘+1⋮𝑢𝑘𝑘+𝑛−1] ,则
𝑋𝑘=[𝐴―𝐴―2⋮𝐴―𝑁]𝑥𝑘+[𝐵―0⋯0𝐴―𝐵―𝐵―⋯⋮⋮⋮⋱⋮𝐴―𝑁−1𝐵―𝐴―𝑁−2𝐵―⋯𝐵―]𝑈𝑘
上式可以记为 𝑋=𝐴𝑞𝑝𝑥0+𝐵𝑞𝑝𝑈 。对于目标值 𝑋ref=[𝑥𝑘+1𝑥𝑘+2⋮𝑥𝑘+𝑛] ,优化问题可以转化为:
min𝑈𝐽(𝑈)=‖𝑋−𝑋ref‖𝐿+‖𝑈‖𝐾=(𝑋−𝑋𝑟𝑒𝑓)𝑇𝐿(𝑋−𝑋𝑟𝑒𝑓)+𝑈𝑇𝐾𝑈=(𝐴𝑞𝑝𝑥0+𝐵𝑞𝑝𝑈−𝑦)𝑇𝐿(𝐴𝑞𝑝𝑥0+𝐵𝑞𝑝𝑈−𝑦)+𝑈𝑇𝐾𝑈=(𝑥0𝑇𝐴𝑞𝑝𝑇+𝑈𝑇𝐵𝑞𝑝𝑇−𝑦𝑇)𝐿(𝐴𝑞𝑝𝑥0+𝐵𝑞𝑝𝑈−𝑦)+𝑈𝑇𝑘𝑈=𝑈𝑇(𝐵𝑞𝑝𝑇𝐿𝐵𝑞𝑝+𝐾)𝑈+𝑈𝑇𝐵𝑞𝑝𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)+(𝐴𝑞𝑝𝑥0−𝑦)𝑇𝐿𝐵𝑞𝑝𝑈+(𝐴𝑞𝑝𝑥0−𝑦)𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)=𝑈𝑇(𝐵𝑞𝑝𝑇𝐿𝐵𝑞𝑝+𝐾)𝑈+𝑈𝑇𝐵𝑞𝑝𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)+[𝑈𝑇𝐵𝑞𝑝𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)]𝑇+(𝐴𝑞𝑝𝑥0−𝑦)𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)
观察上式,第二第三项L左右均为向量且L为对角阵,故两者相同;第四项中的 𝐴𝑞𝑝𝑥0−𝑦 无控制量的影响,仅为状态量的变化,为常数项,可以省略。故上式可以整理为:
min𝑈𝐽(𝑈)=𝑈𝑇(𝐵𝑞𝑝𝑇𝐿𝐵𝑞𝑝+𝐾)𝑈+2𝑈𝑇𝐵𝑞𝑝𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)
即可以整理为:
min𝑈12𝑈𝑇𝐻𝑈+𝑈𝑇𝑔𝑠.𝑡.𝑐―≤𝐶𝑈≤𝑐―
其中:(维度中的 𝑛 为足数4, 𝑘 为单次MPC的迭代次数)
𝐻=2(𝐵𝑞𝑝𝑇𝐿𝐵𝑞𝑝+𝐾)∈𝑅3𝑛𝑘×3𝑛𝑘𝑔=2𝐵𝑞𝑝𝑇𝐿(𝐴𝑞𝑝𝑥0−𝑦)∈𝑅3𝑛𝑘×1
至此可得机器狗跟踪质心轨迹的一组最优足端支撑力, 𝑢0=[𝑓1𝑓2𝑓3𝑓4]
WBC控制器
计算关节位置、速度、加速度
零空间
通过MPC可得到最优足端力 𝑢0 ,可通过 𝜏=𝐽(𝜃)𝑇𝐹 计算关节力矩,但只适用于低速场景。在高速场景下,足端与地面的接触时间非常短,无法进行优化,此时动态性能较差,故需要使用WBC控制器,其输入参数为接触状态、支撑力、足端轨迹、质心轨迹。且其控制频率比MPC快。
当机器人高速运动时,四条腿触地时间很短,机器人大部分时间处于欠驱动状态,与无人机欠驱动系统不同,四足机器人与地面的频繁接触变成了干扰项。此时机器人相当于与一个虚拟浮动基座相连。此虚拟浮动基座有6个自由度(冗余),此时机器人的状态变得不确定。
将需要控制的变量进行优先级划分,使用零空间理论:
| 级别 | 内容 | 约束 |
|---|---|---|
| 0级 | 足端接触力 | 高级别 |
| 1级 | 机器人姿态 | 不能翻 |
| 2级 | 机器人位置 | 可适量浮动 |
| 3级 | 摆动退轨迹 | 低级别 |
冗余自由度机器人的优化
𝐴 的零空间是 𝐴𝑥=0 的所有解 𝑥 的集合,也就是 𝑥 固定,无论 𝐴 取何值,结果均为0。类比串联机械臂,末端固定而其他关节转动时,所有能转动的位形构成零空间。
前文推导了末端速度与关节角速度之间的关系:𝑥˙=𝐽(𝜃)𝜃˙ ,若 𝐽(𝜃) 可逆,可以得到 𝜃˙=𝐽−1(𝜃)𝑥˙ 。
若对于机械臂,遇到奇异位形,或关节数大于末端坐标数,此时 𝐽(𝜃) 不可逆。故引入伪逆, 𝐽(𝜃) 的伪逆表示为 𝐽†(𝜃) ,无论 𝐽(𝜃) 是否可逆,关节角速度均可表示为 𝜃˙=𝐽†(𝜃)𝑥˙ 。
伪逆的计算可以分两种情况
- 欠约束,关节数n<末端坐标数m, 𝐽†𝐽=𝐼,𝐽†=(𝐽𝑇𝐽)−1 ,此时方程可能无解,用代价函数使结果逼近设定值。
- 冗余约束,关节数n>末端坐标数m, 𝐽𝐽†=𝐼,𝐽†=𝐽𝑇(𝐽𝐽𝑇)−1 ,此时方程有无数解,设定关节约束得到最优结果。
对于冗余约束机械臂,若想在保持末端位姿不变的前提下控制其他关节的状态,则需利用零空间。
𝜃˙=𝐽†(𝜃)𝑥˙ 是一个特解,其通解为 𝜃˙=𝐽†(𝜃)𝑥˙+(𝐼−𝐽†(𝜃)𝐽(𝜃))𝑧 TODO原理
将 𝑥˙ 称为任务空间, 𝜃˙ 称为控制空间, 𝑧 称为零空间。 𝑥˙ 中为高优先级的任务, 𝑧 中为低优先级的任务。
两个任务
对于两个任务,高优先级任务为 𝑤˙1 ,低优先级任务为 𝑤˙2
𝑤˙1=𝐽1(𝜃)𝜃˙𝑤˙2=𝐽2(𝜃)𝜃˙
对于第一个高优先级任务的式子,其冗余控制方程为:
𝜃˙=𝐽1†(𝜃)𝑤˙1+(𝐼−𝐽1†(𝜃)𝐽1(𝜃))𝑧
将其带入第二个式子,得到:
𝑤˙2=𝐽2(𝜃)(𝐽1†(𝜃)𝑤˙1+(𝐼−𝐽1†(𝜃)𝐽1(𝜃))𝑧)
整理得:
𝐽2(𝜃)(𝐼−𝐽1†(𝜃)𝐽1(𝜃))𝑧=𝑤˙2−𝐽2(𝜃)𝐽1†(𝜃)𝑤˙1
此时结果可能不唯一,使用最小二乘法优化代价函数。同样需要分为以下两种情况:
- 欠约束, min|𝑧|2
- 冗余约束, min|𝐽2(𝜃)(𝐼−𝐽1†(𝜃)𝐽1(𝜃))𝑧−𝑤˙2+𝐽2(𝜃)𝐽1†(𝜃)𝑤˙1|2
多个任务
推广到一般形式,对于n个任务,符合任务优先级的关节速度为:
𝑞˙=∑𝑖=1𝑛𝑁𝑖𝑞˙𝑖𝑞˙𝑖=(𝐽𝑖𝑁𝑖―)†(𝑥˙𝑖∗−𝐽𝑖∑𝑛=1𝑛−1𝑁𝑘𝑞˙𝑘)
式中 𝑥˙𝑖∗ 为最优解, 𝑁𝑖― 为组合雅可比矩阵 𝐽𝑖― 的零空间投影矩阵, 𝐽𝑖―=[𝐽1𝐽2⋮𝐽𝑖−1] 为所有任务优先级高于 𝑖 的任务的雅可比矩阵的组合。
写成迭代形式:
𝑞˙𝑖=𝑞˙𝑖−1+(𝐽𝑖𝑁𝑖−1)†(𝑥˙𝑖∗−𝐽𝑖𝑞˙𝑖−1)
关节位置
根据上文的推导,可以得到关节位置的迭代形式:
Δ𝑞1=𝐽1†(𝑥1𝑑𝑒𝑠−𝑥1)Δ𝑞2=Δ𝑞1+𝐽2|𝑝𝑟𝑒†(𝑥2des−𝑥2−𝐽2Δ𝑞1)⋮Δ𝑞𝑖=Δ𝑞𝑖−1+𝐽𝑖|𝑝𝑟𝑒†(𝑥𝑖des−𝑥𝑖−𝐽𝑖Δ𝑞𝑖−1)
其中:
𝐽𝑖|𝑝𝑟𝑒=𝐽𝑖𝑁𝑖−1,𝑁𝑖−1=𝑁0𝑁1|0⋯𝑁𝑖−1|𝑖−2,𝑁0=𝐼−𝐽𝑐†𝐽𝑐,𝑁𝑖|𝑖−1=𝐼−𝐽𝑖|𝑖−1†𝐽𝑖|𝑖−1.
其中 𝐽𝑖 为第 𝑖 项任务雅可比矩阵; 𝑥𝑖des 为第 𝑖 项任务的期望位置; Δ𝑞𝑖 为根据第 𝑖 项任务迭代计算出的关节位置增量; 𝐽𝑖|𝑝𝑟𝑒 为第 𝑖 项任务到先前任务的零空间投影; 𝐽𝑐 为接触约束雅可比矩阵;
关节速度与加速度
同理可以得到关节速度与加速度( dyn 代表动态一致伪逆: 𝐽dyn―=𝐴−1𝐽𝑇(𝐽𝐴−1𝐽𝑇)−1 ):
𝑞˙𝑖cmd=𝑞˙𝑖−1cmd+𝐽𝑖|𝑝𝑟𝑒†(𝑥˙𝑖des−𝐽𝑖𝑞˙𝑖−1cmd),𝑞¨𝑖cmd=𝑞¨𝑖−1cmd+𝐽𝑖|𝑝𝑟𝑒dyn―(𝑥¨𝑖cmd−𝐽˙𝑖𝑞˙−𝐽𝑖𝑞¨𝑖−1cmd)
其中( 𝐾𝑝 和 𝐾𝑑 分别是位置和速度反馈增益,cmd代表控制命令):
𝑞𝑖cmd=𝑞𝑖+Δ𝑞𝑖𝑥¨𝑖cmd=𝑥¨des+𝐾𝑝(𝑥𝑖des−𝑥𝑖)+𝐾𝑑(𝑥˙des−𝑥˙)
计算出的 𝑞𝑖cmd 和 𝑞˙𝑖cmd 发送到关节PD控制器、 𝑞¨𝑖cmd 发送到QP规划器计算扭矩命令
计算关节力矩
浮动基动力学模型
对于固定机械臂这种基坐标系固定的机器人,只需知道每个关节的角度即可知道机器人的姿态。但对于四足机器人来说基座是不固定的,故需要在世界系与浮动基座机器人本体系之间建立一个没有实体的 6 自由度关节,其关节空间向量为 𝑞=[𝑞𝑓𝑞𝑗] ,其中 𝑞𝑓 代表身体浮动基的6个自由度, 𝑞𝑗 代表关节的12个自由度。浮动基动力学方程为:
𝐴𝑞¨+𝑏+𝑔=𝑆𝑗𝑇𝜏+𝐽𝑖𝑛𝑡𝑇𝑓𝑖𝑛𝑡−𝐽𝑐𝑇𝑓𝑖
上式中 𝐴 为质量(惯量)矩阵; 𝑏 为可科氏力与离心力项; 𝑔 为重力项; 𝑆𝑗 为驱动关节选择矩阵,将驱动关节的扭矩映射到整个配置空间; 𝑓𝑖𝑛𝑡 为内力; 𝑓𝑖 为足底力; 𝐽 为约束雅可比矩阵,其中 𝑖𝑛𝑡 代表内部约束; 𝑐 代表接触约束, 𝐽 满足下式:
0=𝐽𝑞˙0=𝐽𝑞¨+𝐽˙𝑞˙
松弛优化
在机器人的运动过程中需要遵循动力学方程以及满足一些不等式约束来保证机器人的稳定,故使用QP优化。引入松弛变量 𝛿𝑓𝑟 、 𝛿𝑓 ,允许机器人基座与期望状态之间存在偏差,这使得机械狗在一些不可控制的姿态条件下,仍能计算出相应的控制信号,更有利于机器人的高速运动。
浮动基动力学方程加速度足端接触反力足端摩擦约束min𝛿𝑓𝑟𝑇𝑄1𝛿𝑓𝑟+𝛿𝑓𝑇𝑄2𝛿𝑓s.t𝑆𝑓(𝐴𝑞¨+𝑏+𝑔)=𝑆𝑓𝐽𝑐𝑇𝑓𝑟(浮动基动力学方程)𝑞¨=𝑞¨cmd+[𝛿𝑓𝑜𝑛𝑗](加速度)𝑓𝑟=𝑓𝑟MPC+𝛿𝑓𝑟(足端接触反力)𝑊𝑓𝑟≥0(足端摩擦约束)
其中, 𝑓𝑟MPC 为MPC计算的支撑腿的反作用力; 𝑆𝑓 为选择矩阵; 𝑊 为权重矩阵;
将优化出的地面反力、关节加速度及前文计算得到的关节位置、速度带到动力学方程里,可以求出支撑腿、摆动腿的关节力矩(对于摆动腿来说 𝑓𝑟=0 ):
[𝜏𝑓𝜏𝑗]=𝐴𝑞¨+𝑏+𝑔−𝐽𝑐𝑓𝑟
向电机发送控制力矩
之后使用求得的关节力矩做为前馈,再加上关节位置、速度的PD控制,对机器人的支撑腿、摆动腿进行控制。
𝜏𝑖=𝜏cmd+𝐾𝑝(𝑞𝑖cmd−𝑞𝑖)+𝐾𝑑(𝑞˙𝑖cmd−𝑞˙𝑖)
参考文献
足式机器人
基于稳定性的仿生四足机器人控制系统设计(于宪元)
Legged Robots That Balance
Quadrupedal Locomotion : An Introduction to the Control of Four-legged Robots
状态估计器
【干货|开源MIT Min cheetah机械狗设计(十)】|状态估计控制器设计
卡尔曼滤波(kalman)相关理论以及与HMM、最小二乘法关系
MPC部分
Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive Control
MIT四足机器人Cheetah 3控制方案理解笔记(2)——Convex Mpc身体姿态控制
【干货|开源MIT Min cheetah机械狗设计(七)】|MPC控制器之状态方程建立
【干货|开源MIT Min cheetah机械狗设计(八)】|MPC控制器设计
四足机器人学习笔记(3)cheetah3 convexMPC论文学习笔记
WBC部分
Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control
MIT四足机器人控制方案理解笔记(3)——Mini Cheetah 19年的MPC+WBC控制方案
【干货|开源MIT Min cheetah机械狗设计(九)】|WBC控制器设计
ETH机器人动力学讲义:基于零空间方法的全身运动控制(WBC)-1
其他
Computationally-Robust and Efficient Prioritized Whole-Body Controller with Contact Constraints
机器人学相关书籍
Robot Modeling and Control(机器人建模和控制)
Robotics, Vision and Control Fundamental Algorithms In MATLAB(机器人学 机器视觉与控制 MATLAB算法基础)
Introduction to Robotics Mechanics and Control(机器人学导论)
Modern Robotic Mechanics, Planning, and Control(现代机器人学:机构、规划与控制)
Control of Robot Manipulators in Joint Space
Rigid-Body Dynamics Algorithms
Springer Handbook of Robotics(机器人手册)
Theory of applied robotics: kinematics, dynamics, and control.(应用机器人学:运动学、动力学与控制技术)
Robot Dynamics Lecture Notes(机器人动力学课程笔记)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









