










空时二维自适应处理-相控阵雷达二维杂波谱分布仿真
非均匀性杂波回波
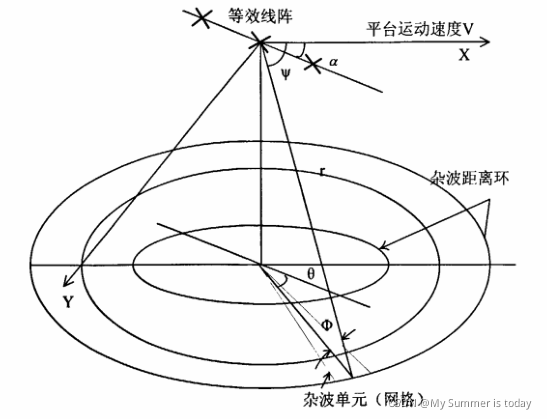
在机载雷达杂波仿真时,需要综合考虑杂波单元的反射率模型、杂波的幅度分布形式、杂波的频谱结构以及雷达系统参数是影响杂波的四大主要因素。通常,雷达杂波的信号的仿真是按距离门进行的,由于存在距离模糊,落入某一距离门内的杂波回波信号是由来自地面多个距离环的杂波反射信号共同叠加组成的,雷达杂波距离环的关系如图所示。
在进行杂波模拟时,首先将杂波反射面按雷达的分辨单元划分成
Δ
θ
×
Δ
r
\Delta \theta×\Delta r
Δθ×Δr的网格,然后对单个杂波反射单元的视频回波信号进行模拟,通过对来自同一距离环的各个网络的回波信号进行叠加得到单一距离环的杂波信号,然后重复上述过程求得各个模糊距离环的杂波信号,最后,将来自各个距离环的杂波信号进行叠加求和,从而得到指定距离门的杂波信号。
假设以1号单元为相位参考点,那么在t时刻该单元所接收的来自
(
θ
,
ϕ
)
(\theta,\phi )
(θ,ϕ)方向的杂波散射源的回波信号为:
s
(
θ
,
ϕ
,
t
)
=
A
(
θ
,
ϕ
)
c
(
θ
,
ϕ
,
t
)
u
(
t
−
t
r
)
e
j
2
π
f
d
t
e
−
j
4
π
R
/
λ
s(\theta,\phi,t)=\sqrt{A(\theta,\phi)}c(\theta,\phi,t)u(t-t_r)e^{j2\pi f_dt}e^{-j4\pi R/\lambda}
s(θ,ϕ,t)=A(θ,ϕ)c(θ,ϕ,t)u(t−tr)ej2πfdte−j4πR/λ
其中,
t
r
=
2
R
/
c
t_r=2R/c
tr=2R/c为回波的时间延迟,
u
(
t
)
u(t)
u(t)为雷达发射波形调制包络,
4
π
R
/
λ
4\pi R/\lambda
4πR/λ为空间距离引起的相位差,
f
d
=
(
2
V
p
/
λ
)
c
o
s
θ
c
o
s
ϕ
f_d=(2V_p/\lambda)cos\theta cos\phi
fd=(2Vp/λ)cosθcosϕ为散射源的多普勒频率,
A
(
θ
,
ϕ
)
A(\theta,\phi)
A(θ,ϕ)为功率函数,由雷达方程决定,
c
(
θ
,
ϕ
,
t
)
c(\theta,\phi,t)
c(θ,ϕ,t)为该杂波散射源归一化调制包络
相控阵雷达二维杂波谱分布
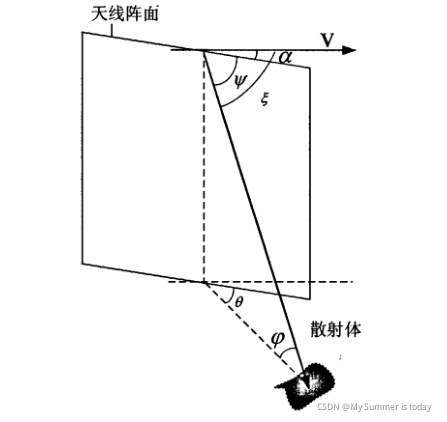
如图所示,载机水平飞行,速度V,雷达波长为
λ
\lambda
λ,天线轴与V的夹角为
α
\alpha
α,载机速度与散射体波达方向的夹角为
ξ
\xi
ξ,地杂波散射体相对于天线轴的方位角和高低角分别为
θ
\theta
θ和
φ
\varphi
φ,
Ψ
\varPsi
Ψ为相对于天线轴的锥角,
c
o
s
Ψ
=
c
o
s
θ
c
o
s
φ
cos\varPsi =cos\theta cos\varphi
cosΨ=cosθcosφ,该散射体回波的多普勒频率为:
f
=
2
v
λ
c
o
s
(
θ
+
α
)
c
o
s
(
φ
)
=
f
d
M
(
c
o
s
Ψ
c
o
s
α
−
c
o
s
φ
2
−
c
o
s
φ
2
s
i
n
α
)
f=\frac{2v}{\lambda}cos(\theta+\alpha)cos(\varphi)=f_{dM}(cos\varPsi cos\alpha-\sqrt{cos\varphi^2-cos\varphi^2}sin\alpha)
f=λ2vcos(θ+α)cos(φ)=fdM(cosΨcosα−cosφ2−cosφ2sinα)
其中,
f
d
M
=
2
v
λ
f_{dM}=\frac{2v}{\lambda}
fdM=λ2v
对于空时二维处理,控制时域滤波权相当于改变其多普勒频率 f d f_d fd的相应特性,控制空域等效线阵的权相当于改变其锥角余弦 c o s Ψ cos\varPsi cosΨ的波束响应。因此,从空时二维滤波的角度研究二维杂波谱,取 2 f d / f r 2f_d/f_r 2fd/fr和 c o s Ψ cos\varPsi cosΨ作坐标, f r f_r fr为脉冲重复频率
相控阵雷达二维杂波谱分布仿真
仿真参数:
相控阵大小:面阵8×10
慢时间大小:8
飞机速度:120
PRF:1500
(1)阵元等效位置

(2)正侧视
α
=
0
°
\alpha=0°
α=0°

(3)斜视
α
=
45
°
\alpha=45°
α=45°

(4)前视
α
=
90
°
\alpha=90°
α=90°



















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











