








 超级会员免费看
超级会员免费看

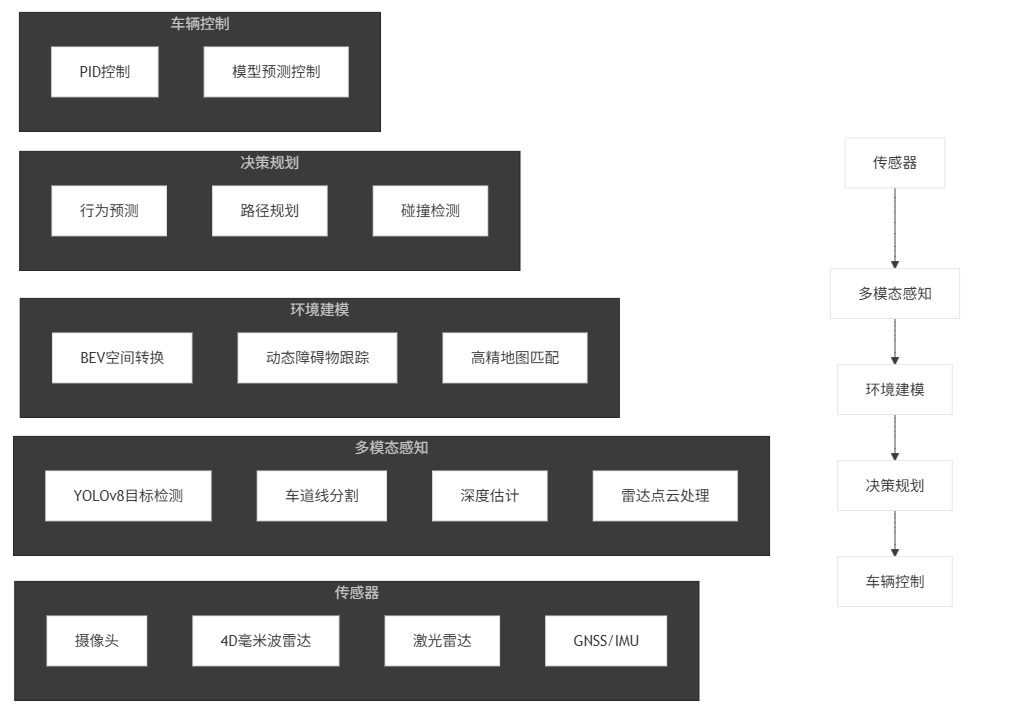
以下是一个完整的 YOLOv8 自动驾驶系统 技术方案,涵盖 感知、预测、规划、控制全栈实现,并提供模块化代码和部署指南。系统设计注重实时性、多传感器融合和嵌入式部署能力。
一、系统架构
二、核心模块实现
1. 多模态感知(Perception)
python
# perception/multimodal_detector.py
import torch
from ultralytics import YOLO
from pointnet2 import PointNet2
class MultimodalDetector:
def __init__(self):
self.yolo = YOLO("yolov8n-seg.pt") # 带分割的YOLOv8
self.lidar_model = PointNet2().eval()
self.calib = load_calibration()
def run(self, img, lidar_points):

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 672
672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











