







之前已经介绍过了DTW算法,现在根据文章 toward accurate dynamic time warping in linear time and space,以及别人实现的fastdtw代码分析fast-DTW算法。参考博客:http://www.cnblogs.com/kemaswill/archive/2013/04/18/3029078.html
简单讲讲fast-DTW,该算法最主要有两个部分,第一个是约束
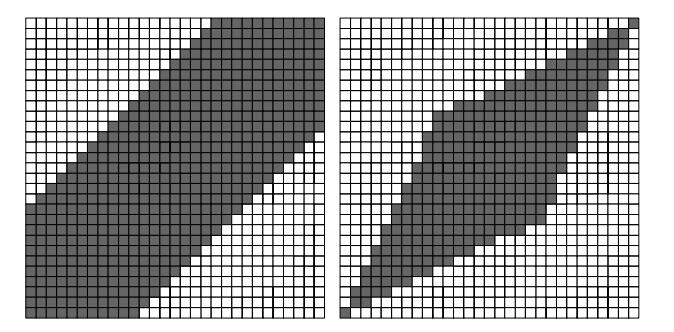
将搜索空间约束在阴影位置,减少了搜索的次数。
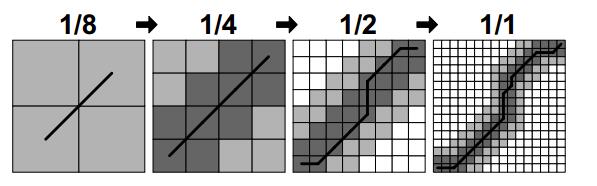
第二个是抽象(abstraction),将图像的像素合并,1/1–>1/2–>1/4–>1/8…知道可以确定路径。如下图,当像素合并为1/8时,已经可以确定路径,即从左下角到右上角。接着再像素粒度细化,从1/8回到1/4确定该像素下的路径,接着1/2,最后1/1。
接下来我们看看Python实现的fastdtw算法。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
从代码可以看出来这个过程实现是递归的,并且调用了三个函数,__expand_window,dtw,__reduce_by_half。我们先去弄懂这三个函数,再回头来把整个fastdtw算法理顺。
首先我们来看这个dtw算法。仔细理一理思路,就能很清晰的分析这个代码了,window就是限制了的搜索范围,只要在这个范围内按照这个条件搜索就行。
D[i, j] = min((D[i-1, j][0]+dt, i-1, j), (D[i, j-1][0]+dt, i, j-1),(D[i-1, j-1][0]+dt, i-1, j-1), key=lambda a: a[0])
这其中用到了python的collections的defaultdict模块,只要你传入一个默认的工厂方法,那么请求一个不存在的key时, 便会调用这个工厂方法使用其结果来作为这个key的默认值。寻找路径的时候是从终点寻到起点即可。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
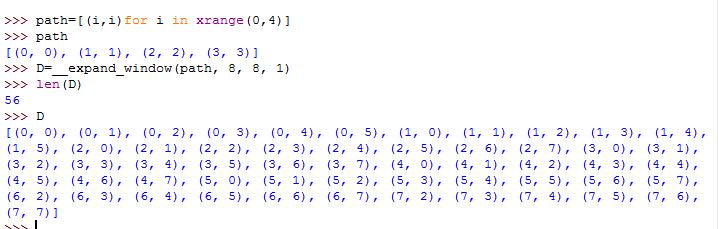
接着,看看constraint是怎么实现的,即dtw中的window。这一部分没太弄明白,我运行了一下这个程序,当2x2–> 4x4扩大的时候,path是整个大小,而4x4–>8x8扩大的时候path大小为56。我表示很惊讶,要是我写这个代码,写出来的path大小不会这么多。
paper里面写时间复杂度的时候提到
假设我们是在8*8的的大小下寻找搜索空间,按照paper的公式来说应该是56个,而按照图示和描述应该是44个,不信自己可以去数一数。当然我也知道当N趋于无穷时,搜索空间的差异就显得很小了。

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
最后返回去看整个代码,fastdtw就是一直递推调用自己,同时将两个序列二分压缩,直到达到可以直接计算出path的大小时,返回每一次调用。然后将粒度细化,就是图二的整个过程。















 1535
1535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









