









CubeMx的设置方法
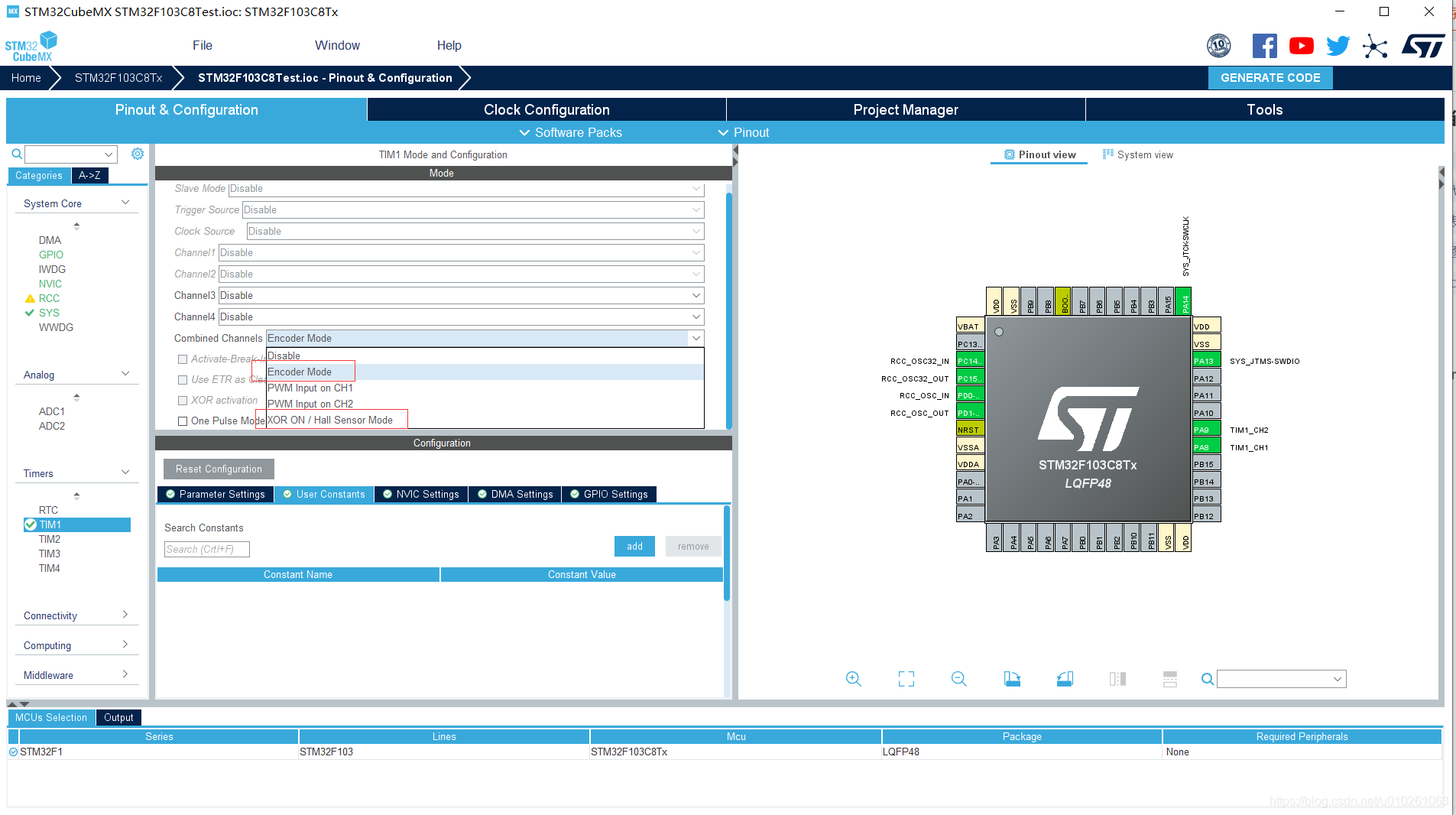
CubeMx生成编码的相关代码
底层初始化
/**
* @brief TIM_Encoder MSP Initialization
* This function configures the hardware resources used in this example
* @param htim_encoder: TIM_Encoder handle pointer
* @retval None
*/
void HAL_TIM_Encoder_MspInit(TIM_HandleTypeDef* htim_encoder)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim_encoder->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* Peripheral clock enable打卡定时器1的时钟 */
__HAL_RCC_TIM1_CLK_ENABLE();
// 打开GPIO的时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM1 GPIO Configuration
PA8 ------> TIM1_CH1
PA9 ------> TIM1_CH2
配置GPIO
*/
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
}
/**
* @brief TIM_Encoder MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_encoder: TIM_Encoder handle pointer
* @retval None
*/
void HAL_TIM_Encoder_MspDeInit(TIM_HandleTypeDef* htim_encoder)
{
if(htim_encoder->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspDeInit 0 */
/* USER CODE END TIM1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM1_CLK_DISABLE();
/**TIM1 GPIO Configuration
PA8 ------> TIM1_CH1
PA9 ------> TIM1_CH2
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_8|GPIO_PIN_9);
/* USER CODE BEGIN TIM1_MspDeInit 1 */
/* USER CODE END TIM1_MspDeInit 1 */
}
}
功能初始化代码
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 65535;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 0;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 0;
if (HAL_TIM_Encoder_Init(&htim1, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
从以上初始化代码中并没有打卡中断
HAL_StatusTypeDef HAL_TIM_Encoder_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel)
从上述打开编码器的中断函数推测可能还需要打开更新中断,防止 定时器的溢出
//个人认为这种打开编码器中断有可能有问题
__HAL_TIM_ENABLE_IT(&htimer,TIM_IT_UPDATE);
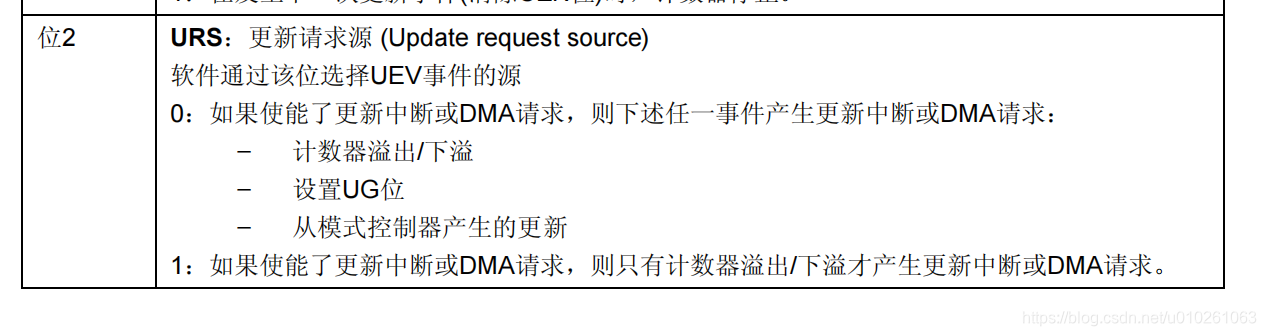
/* 野火提示 : 设置更新事件请求源为:计数器溢出 这个地方可能会忘记设置 */
__HAL_TIM_URS_ENABLE(&TIM_EncoderHandle);
骄阳的板子特别注明设置URS的位置,但是个人觉得不需要设置
__HAL_TIM_URS_ENABLE(&TIM_EncoderHandle);
个人觉得编码器打卡需要这样做但是没有测试
//打开编码器
HAL_TIM_Encoder_Start(&htim, uint32_t Channel)
//打开更细中断
__HAL_TIM_ENABLE_IT(&htimer,TIM_IT_UPDATE);
参考相关文章 https://blog.csdn.net/u010261063/article/details/116209579















 1210
1210











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











