







 本文深入探讨了永磁同步电机的FOC(磁场定向控制)中的Clarke变换和Park变换。通过介绍自然坐标系ABC、αβ坐标系和dq坐标系,详细阐述了变换原理,并提供了Simulink仿真实例。同时,文章附带了相关程序代码和资料链接。
本文深入探讨了永磁同步电机的FOC(磁场定向控制)中的Clarke变换和Park变换。通过介绍自然坐标系ABC、αβ坐标系和dq坐标系,详细阐述了变换原理,并提供了Simulink仿真实例。同时,文章附带了相关程序代码和资料链接。

文章目录
1 前言
永磁同步电机是复杂的非线性系统,为了简化其数学模型,实现控制上的解耦,需要建立相应的坐标系变换,即Clark变换和Park变换。
2 自然坐标系ABC
三相永磁同步电机的驱动电路如下图所示;

根据图示电路可以发现在三相永磁同步电机的驱动电路中,三相逆变输出的三相电压为
U
A
U_{A}
UA,
U
B
U_{B}
UB,
U
C
U_{C}
UC将作用于电机,那么在三相平面静止坐标系ABC中,电压方程满足以下公式:
{ U A = U m c o s θ e U B = U m c o s ( θ e + 2 π 3 ) U C = U m c o s ( θ e − 2 π 3 ) \begin{cases}U_{A} = U_{m}cos\theta_{e} \\ U_{B} = U_{m}cos(\theta_{e} + \cfrac{2\pi}{3}) \\ U_{C} = U_{m}cos(\theta_{e} - \cfrac{2\pi}{3}) \end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧UA=UmcosθeUB=Umcos(θe+32π)UC=Umcos(θe−32π)
θ e \theta_{e} θe为电角度
U m U_{m} Um为相电压基波峰值
所以根据上述公式可以发现,三相电压的大小是随时间变化的正弦波形,相位依次相差120°,具体如下图所示;

3 α β \alpha\beta αβ 坐标系
由静止三相坐标系
A
B
C
ABC
ABC变换到静止坐标系
α
β
\alpha\beta
αβ的过程称之为Clarke变换;在
α
β
\alpha\beta
αβ静止坐标系中,
α
\alpha
α轴和
β
\beta
β轴的相位差为90°,且
α
β
\alpha\beta
αβ的大小是随时间变化的正弦波形,具体如下图所示;

从自然坐标系
A
B
C
ABC
ABC 变换到静止坐标系
α
β
\alpha\beta
αβ,满足以下条件:
[
f
α
f
β
f
0
]
=
T
3
s
/
2
s
∗
[
f
A
f
B
f
C
]
\begin{bmatrix} f_{\alpha} \\ f_{\beta} \\ f_{0} \end{bmatrix} = T_{3s/2s}*\begin{bmatrix} f_{A} \\ f_{B} \\ f_{C} \end{bmatrix}
⎣⎡fαfβf0⎦⎤=T3s/2s∗⎣⎡fAfBfC⎦⎤
其中
T
3
S
/
2
S
T_{3S/2S}
T3S/2S为变换矩阵:
T
3
S
/
2
S
=
N
∗
[
1
−
1
2
−
1
2
0
3
2
−
3
2
2
2
2
2
2
2
]
T_{3S/2S} = N*\begin{bmatrix} 1 &-\cfrac{1}{2} &-\cfrac{1}{2} \\ \\ 0 &\cfrac{\sqrt{3}}{2} &-\cfrac{\sqrt{3}}{2} \\ \\ \cfrac{\sqrt{2}}{2} &\cfrac{\sqrt{2}}{2} &\cfrac{\sqrt{2}}{2} \end{bmatrix}
T3S/2S=N∗⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡1022−212322−21−2322⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
注意: N N N为系数,做等幅值变换和等功率变换 N N N系数不同;
等幅值变换 N = 2 3 N =\cfrac{2}{3} N=32
等功率变换 N = 2 3 N =\sqrt\cfrac{2}{3} N=32
下面均为等幅值变换
3.1 Clarke变换
三相电流
A
B
C
ABC
ABC分别为
i
A
i_{A}
iA,
i
B
i_{B}
iB,
i
C
i_{C}
iC,根据基尔霍夫电流定律满足以下公式:
i
A
+
i
B
+
i
C
=
0
i_{A}+i_{B}+i_{C} = 0
iA+iB+iC=0
静止坐标系
α
β
\alpha\beta
αβ,
α
\alpha
α轴的电流分量为
i
α
i_{\alpha}
iα,
i
β
i_{\beta}
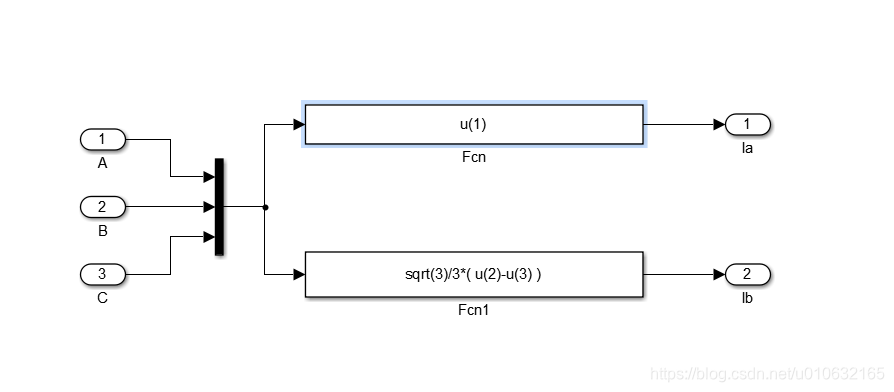
iβ,则Clark变换满足以下公式:
i α = i A i β = 1 3 ∗ i A + 2 3 ∗ i B i_{\alpha} = i_{A} \\ \\ i_{\beta} = \cfrac{1}{\sqrt{3}}*i_{A}+\cfrac{2}{\sqrt{3}}*i_{B} iα=iAiβ=31∗iA+32∗iB
在matlab的simulink仿真如下图所示;
最终得到三相电流
i
A
i_{A}
iA,
i
B
i_{B}
iB,
i
C
i_{C}
iC的仿真结果如下;

得到
α
β
\alpha\beta
αβ 坐标的
i
α
i_{\alpha}
iα 和
i
β
i_{\beta}
iβ 的仿真结果如下图所示;

由上述两张图分析可以得到,等幅值Clark变换前后峰值不变,
α
β
\alpha\beta
αβ坐标系中
i
α
i_{\alpha}
iα和
i
β
i_{\beta}
iβ相位相差90°。
3.2 Clarke反变换
暂略
Clarke反变换的simulink仿真如下图所示;

4 d q dq dq 坐标系
d
q
dq
dq 坐标系相对与定子来说是旋转的坐标系,转速的角速度和转子旋转的角速度相同,所以,相当于转子来说,
d
q
dq
dq 坐标系就是静止的坐标系;而
i
d
i_{d}
id和
i
q
i_{q}
iq则是恒定不变的两个值,具体如下图所示;

根据物理结构,我们发现;
d
d
d 轴方向与转子磁链方向重合,又叫直轴;
q
q
q 轴方向与转子磁链方向垂直,又叫交轴;
d
d
d轴和
q
轴
q轴
q轴如下图所示;

4.1 Park变换
Park变换的本质是静止坐标系
α
β
\alpha\beta
αβ乘以一个旋转矩阵,从而得到
d
q
dq
dq坐标系,其中满足以下条件:
[
f
d
f
q
]
=
T
2
s
/
2
r
∗
[
f
α
f
β
]
\begin{bmatrix} f_{d} \\ f_{q} \end{bmatrix} = T_{2s/2r}*\begin{bmatrix} f_{\alpha} \\ f_{\beta} \end{bmatrix}
[fdfq]=T2s/2r∗[fαfβ]
其中
T
2
s
/
2
r
T_{2s/2r}
T2s/2r为旋转矩阵,所以,park变换和park反变换其根本就是旋转矩阵不同,
T
2
s
/
2
r
T_{2s/2r}
T2s/2r可以表示为:
T
2
s
/
2
r
=
[
c
o
s
θ
e
s
i
n
θ
e
−
s
i
n
θ
e
c
o
s
θ
e
]
T_{2s/2r} = \begin{bmatrix} cos\theta_{e} & sin\theta_{e} \\ -sin\theta_{e} & cos\theta_{e} \end{bmatrix}
T2s/2r=[cosθe−sinθesinθecosθe]
T 2 s / 2 r T_{2s/2r} T2s/2r 含义为 2 ∗ s t a t o r 2*stator 2∗stator ==> 2 ∗ r o t o r 2*rotor 2∗rotor
2轴定子坐标系转换到2轴转子坐标系
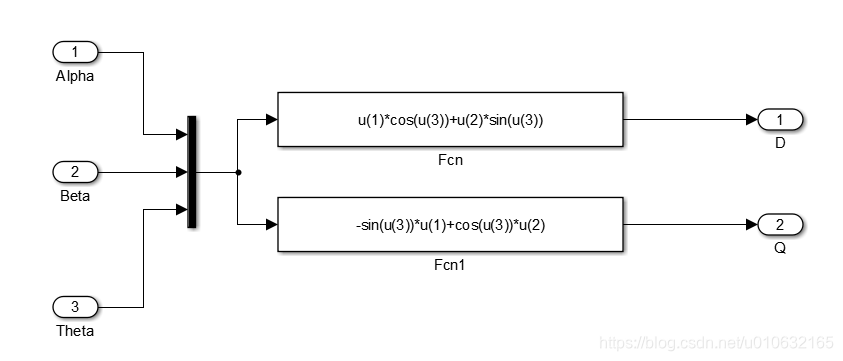
由上式可以得到:
{
i
d
=
i
α
∗
c
o
s
θ
+
i
β
∗
s
i
n
θ
i
q
=
−
i
α
∗
s
i
n
θ
+
i
β
∗
c
o
s
θ
\begin{cases}i_{d}=i_{\alpha}*cos\theta+i_{\beta}*sin\theta \\ i_{q}=-i_{\alpha}*sin\theta+i_{\beta}*cos\theta\end{cases}
{id=iα∗cosθ+iβ∗sinθiq=−iα∗sinθ+iβ∗cosθ
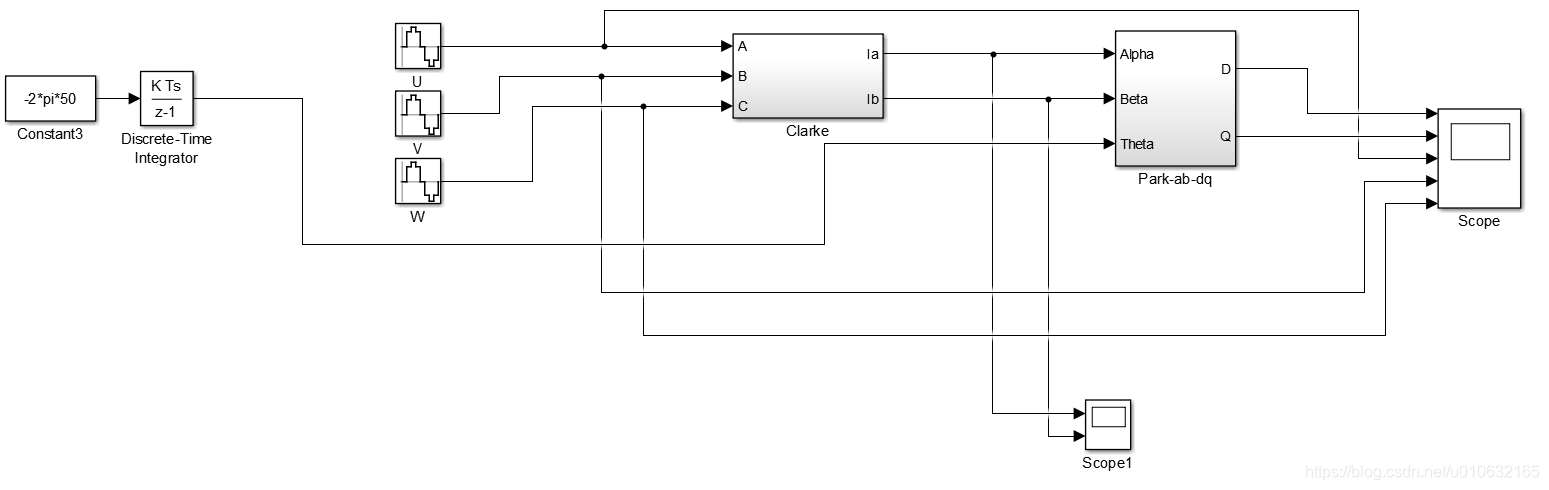
其中simulink仿真如下图所示;
作为输入的
i
α
i_{\alpha}
iα 和
i
β
i_{\beta}
iβ,仿真波形如下图所示;
最终经过Park变换得到
i
d
i_{d}
id和
i
q
i_{q}
iq如下图所示;

可以看到,
i
d
i_{d}
id和
i
q
i_{q}
iq是恒定值,所以Park变换也叫做交直变换,由输入的交流量,最终变换到相对与转子坐标的直流量。
在实际写FOC的过程中对于这块变换产生了一个疑问;这里再区分一下正转和反转的情况,以此来说明一下Id和Iq的实际中的作用;
下面先规定一个方向为反转;
正转
通常,大部分书籍以及论文中的正转输入的三相波形如下:
{
U
A
=
U
m
c
o
s
θ
e
U
B
=
U
m
c
o
s
(
θ
e
−
2
π
3
)
U
C
=
U
m
c
o
s
(
θ
e
+
2
π
3
)
\begin{cases}U_{A} = U_{m}cos\theta_{e} \\ U_{B} = U_{m}cos(\theta_{e} - \cfrac{2\pi}{3}) \\ U_{C} = U_{m}cos(\theta_{e} + \cfrac{2\pi}{3}) \end{cases}
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧UA=UmcosθeUB=Umcos(θe−32π)UC=Umcos(θe+32π)
反转
{
U
A
=
U
m
c
o
s
θ
e
U
B
=
U
m
c
o
s
(
θ
e
+
2
π
3
)
U
C
=
U
m
c
o
s
(
θ
e
−
2
π
3
)
\begin{cases}U_{A} = U_{m}cos\theta_{e} \\ U_{B} = U_{m}cos(\theta_{e} + \cfrac{2\pi}{3}) \\ U_{C} = U_{m}cos(\theta_{e} - \cfrac{2\pi}{3}) \end{cases}
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧UA=UmcosθeUB=Umcos(θe+32π)UC=Umcos(θe−32π)
4.2 Park反变换
Park反变换又叫直交变换,由
d
q
dq
dq轴的直流量,最终变换到
α
β
\alpha\beta
αβ的交流量,其中满足变换条件如下:
[
f
d
f
q
]
=
T
2
r
/
2
s
∗
[
f
α
f
β
]
\begin{bmatrix} f_{d} \\ f_{q} \\ \end{bmatrix} = T_{2r/2s}*\begin{bmatrix} f_{\alpha} \\ f_{\beta} \\ \end{bmatrix}
[fdfq]=T2r/2s∗[fαfβ]
其中
T
2
s
/
2
r
T_{2s/2r}
T2s/2r为Park变换的逆矩阵,所以,存在条件:
T
2
r
/
2
s
=
T
2
r
/
2
s
−
1
=
[
c
o
s
θ
e
−
s
i
n
θ
e
s
i
n
θ
e
c
o
s
θ
e
]
T_{2r/2s} = T_{2r/2s}^{-1} = \begin{bmatrix} cos\theta_{e} & -sin\theta_{e} \\ sin\theta_{e} & cos\theta_{e} \\ \end{bmatrix}
T2r/2s=T2r/2s−1=[cosθesinθe−sinθecosθe]
最终由上式可以得到:
{
i
α
=
i
d
∗
c
o
s
θ
−
i
q
∗
s
i
n
θ
i
β
=
i
d
∗
s
i
n
θ
+
i
q
∗
c
o
s
θ
\begin{cases}i_{\alpha}=i_{d}*cos\theta-i_{q}*sin\theta \\ i_{\beta}=i_{d}*sin\theta+i_{q}*cos\theta\end{cases}
{iα=id∗cosθ−iq∗sinθiβ=id∗sinθ+iq∗cosθ
仿真暂略。
5 程序实现
坐标变换的C程序主要基于TI的IQMATH库进行实现,详情已经提交到附件。
如何使用这个库可以参考《STM32 使用IQmath实现SVPWM》
附件
链接:https://pan.baidu.com/s/1s2qU5wA2LMSmed51q-Jayw
提取码:irm2


















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











