







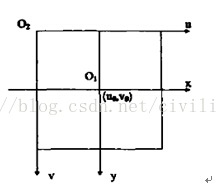
a) 图像平面坐标系统与图像坐标系的关系如下图所示:
用齐次方程表示如下:
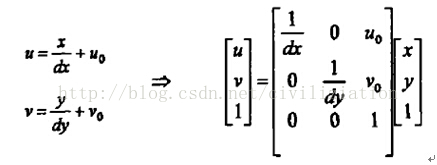
其中(u,v)表示以像素为单位的图像坐标系,(x,y)表示以物理单位表示的图像坐标系。dx dy分别表示图像沿x轴、y轴上每个像素点的物理尺寸。(u0, v0)是摄像机光轴与图像平面的交点,一般定义为图像的中心点。
b) 摄像机坐标(Xc, Yc, Zc)与图像平面坐标(x, y)的变换关系
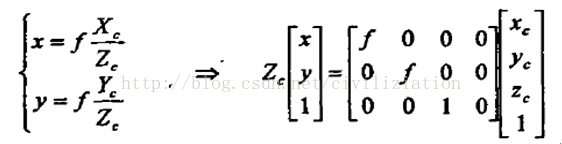
f为焦距。
c) 世界坐标系与摄像机坐标系的关系如图所示:
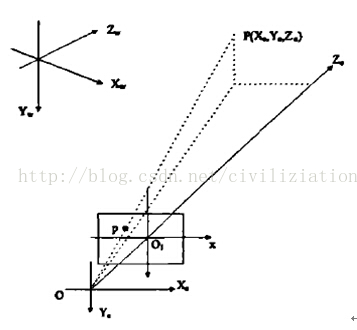
世界坐标到摄像机坐标的转换公式如下:
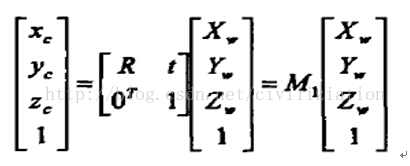
R为旋转矩阵,t为平移矩阵。
d)将图像像素坐标[μ,ν,1]T与世界坐标系下坐标[Xw,Yw,Zw,1]T进行转换如下:
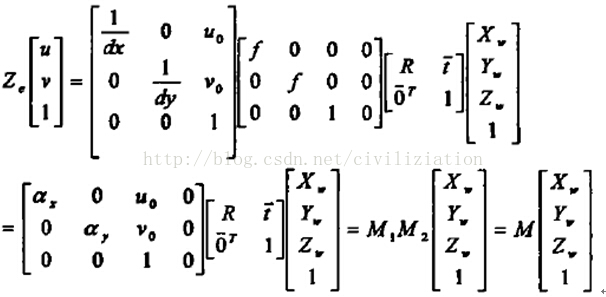
其中M称为投影矩阵
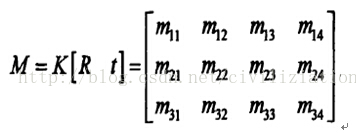
标定的目的就是确定M矩阵。















 710
710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









