







原文链接:点击
平时总看到牛顿法怎样怎样,一直不得要领,今天下午查了一下维基百科,写写我的认识,很多地方是直观理解,并没有严谨的证明。在我看来,牛顿法至少有两个应用方向,1、求方程的根,2、最优化。牛顿法涉及到方程求导,下面的讨论均是在连续可微的前提下讨论。
1、求解方程。
并不是所有的方程都有求根公式,或者求根公式很复杂,导致求解困难。利用牛顿法,可以迭代求解。
原理是利用泰勒公式,在
x
0
x_0
x0处展开,且展开到一阶,即:
f
(
x
)
=
f
(
x
0
)
+
(
x
-
x
0
)
f
′
(
x
0
)
f(x) = f(x_0)+(x-x_0)f'(x_0)
f(x)=f(x0)+(x-x0)f′(x0)
求解方程
f
(
x
)
=
0
f(x)=0
f(x)=0,即
f
(
x
0
)
+
(
x
−
x
0
)
∗
f
′
(
x
0
)
=
0
f(x_0)+(x-x_0)*f'(x_0)=0
f(x0)+(x−x0)∗f′(x0)=0 求解上式得到
x
=
x
1
=
x
0
-
f
(
x
0
)
f
′
(
x
0
)
x =x_1=x_0-\frac{f(x_0)}{f'(x_0)}
x=x1=x0-f′(x0)f(x0)
可以令
x
=
x
1
x=x_1
x=x1(这是为了我们使用迭代法求解),得到
x
1
=
x
0
-
f
(
x
0
)
f
′
(
x
0
)
\color{blue}x_1=x_0-\frac{f(x_0)}{f'(x_0)}
x1=x0-f′(x0)f(x0)
因为这是利用泰勒公式的一阶展开,
f
(
x
)
=
f
(
x
0
)
+
(
x
-
x
0
)
f
′
(
x
0
)
f(x) = f(x_0)+(x-x_0)f'(x_0)
f(x)=f(x0)+(x-x0)f′(x0)和原始的
f
(
x
)
f(x)
f(x)并不是完全相等,而是近似相等,这里求得的
x
1
x_1
x1并不能让
f
(
x
)
=
0
f(x)=0
f(x)=0,只能说
f
(
x
1
)
f(x_1)
f(x1)的值比
f
(
x
0
)
f(x_0)
f(x0)更接近
f
(
x
)
=
0
f(x)=0
f(x)=0。
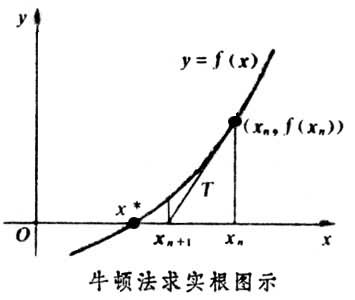
于是乎,迭代求解的想法就很自然了,进而推出第n+1次迭代公式:
x
n
+
1
=
x
n
-
f
(
x
n
)
f
′
(
x
n
)
\color{blue}x_{n+1}=x_n-\frac{f(x_n)}{f'(x_n)}
xn+1=xn-f′(xn)f(xn)
通过迭代,这个式子必然在
f
(
x
∗
)
=
0
f(x^*)=0
f(x∗)=0的时候收敛。
整个过程如下图:
2、牛顿法用于最优化
在最优化的问题中,线性最优化至少可以使用单纯行法求解,但对于非线性优化问题,牛顿法提供了一种求解的办法。假设任务是优化一个目标函数f,求函数f的极大极小问题,可以转化为求解函数f的导数f'=0的问题,这样求可以把优化问题看成方程求解问题(f'=0)。剩下的问题就和第一部分提到的牛顿法求解很相似了。
这次为了求解f'=0的根,把f(x)的泰勒展开,展开到2阶形式:

这个式子是成立的,当且仅当 Δx 无线趋近于0。此时上式等价与:

求解:
得出迭代公式:

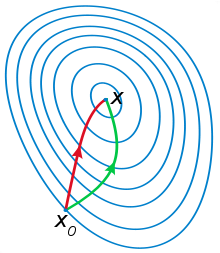
一般认为牛顿法可以利用到曲线本身的信息,比梯度下降法更容易收敛(迭代更少次数),如下图是一个最小化一个目标方程的例子,红色曲线是利用牛顿法迭代求解,绿色曲线是利用梯度下降法求解。
在上面讨论的是2维情况,高维情况的牛顿迭代公式是:

其中H是hessian矩阵,定义为:
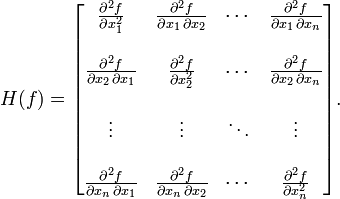
高维情况依然可以用牛顿迭代求解,但是问题是Hessian矩阵引入的复杂性,使得牛顿迭代求解的难度大大增加,但是已经有了解决这个问题的办法就是Quasi-Newton methond,不再直接计算hessian矩阵,而是每一步的时候使用梯度向量更新hessian矩阵的近似。
1、牛顿法应用范围
牛顿法主要有两个应用方向:1、目标函数最优化求解。例:已知 f(x)的表达形式, ,求
,求  ,及g(x)取最小值时的 x ?,即
,及g(x)取最小值时的 x ?,即
由于||f(x)||通常为误差的二范数,此时这个模型也称为最小二乘模型,即 。
。
2、方程的求解(根)。例:求方程的解:g(x) = 0,求 x ?
这两个应用方面都主要是针对g(x)为非线性函数的情况。2中,如果g(x)为线性情况下的求解通常使用最小二乘法求解。
牛顿法的核心思想是对函数进行泰勒展开。
2、牛顿法用于方程求解
对f(x)进行一阶泰勒公式展开:

此时,将非线性方程 g(x) = 0 近似为线性方程:

若 f’(x) != 0,则下一次迭代解为:

牛顿迭代示意图(因此Newton迭代法也称为切线法):





3、牛顿法用于函数最优化求解
对f(x)进行二阶泰勒公式展开:

此时,将非线性优化问题 min f(x) 近似为为二次函数的最优化求解问题:

对于(5)式的求解,即二次函数(抛物线函数)求最小值,对(5)式中的函数求导:


从本质上来讲,最优化求解问题的迭代形式都是:
,
其中k为系数,
为函数的梯度(即函数值上升的方向),那么
为下降的方向,
最优化问题的标准形式是:求目标函数最小值,只要每次迭代沿着下降的方向迭代那么将逐渐达到最优,
而牛顿将每次迭代的步长定为:
。




4、补充
a、严格来讲,在“3、牛顿法用于函数最优化求解”中对函数二阶泰勒公式展开求最优值的方法称为:Newton法,
而在“2、牛顿法用于方程求解”中对函数一阶泰勒展开求零点的方法称为:Guass-Newton(高斯牛顿)法。
b、在上面的陈述中,如果x是一个向量,那么公式中:
应该写成:
,
应该写成:
,
为Hessian(海森)矩阵。
c、牛顿法的优点是收敛速度快,缺点是在用牛顿法进行最优化求解的时候需要求解Hessian矩阵。
因此,如果在目标函数的梯度和Hessian矩阵比较好求的时候应使用Newton法。
牛顿法在进行编程实现的时候有可能会失败,具体原因及解决方法见《最优化方法》-张薇 东北大学出版社 第155页。
5、Newton法与Guass-Newton法之间的联系
对于优化问题
,即
结论:当最优化问题的理论最小值为0时,Newton法求解就可变为Guass-Newton法求解。
另外:对f(x)进行二阶泰勒展开:


f ( x ) = f ( x k ) + J x k + 0.5 x k ′ H x k f(x)=f({x_k})+J{x_k}+0.5{x_k'}H{x_k} f(x)=f(xk)+Jxk+0.5xk′Hxk
f(x)乘以f(x)的转置并忽略二次以上的项:

f T ( x ) f ( x ) = { f T ( x k ) + ( J x k ) T + ( 0.5 x k ′ H x k ) T {f^T}(x)f(x)=\{{f^T}({x_k})+{(J{x_k})^T}+{(0.5{x_k'}H{x_k})^T} fT(x)f(x)={fT(xk)+(Jxk)T+(0.5xk′Hxk)T

∗ { f ( x k ) + J x k + 0.5 x k ′ H x k } *\{f({x_k})+J{x_k}+0.5{x_k'}H{x_k}\} ∗{f(xk)+Jxk+0.5xk′Hxk}


因此,当 x k x_k xk在最优解附近时,即满足 f ( x k ) f(x_k) f(xk),此时可认为: H = J T J H=J^TJ H=JTJ
6、扩展阅读
a、修正牛顿(Newton)法
b、共轭方向法与共轭梯度法
c、拟牛顿法(避免求解Hessian矩阵):DFP算法、BFGS算法















 1628
1628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









