







PID控制是一种常见的反馈控制算法,广泛应用于各种工业控制系统中。在实际应用中,为了提高控制效果和适应不同的控制需求,常常会采用一些改进手段,如抗积分饱和、带死区PID、不完全微分和微分先行等。以下是对这些常见手段的详细介绍:
抗积分饱和
- 原理:积分饱和是指当系统存在持续的偏差时,积分项会不断累积,导致控制器输出过大,从而使执行器达到饱和状态,无法有效调节系统。抗积分饱和的目的是限制积分项的累积,避免积分饱和现象的发生。常见的抗积分饱和方法有:
- 条件积分:只有当控制器输出在执行器的有效工作范围内时,才进行积分运算。一旦控制器输出达到饱和值,就停止积分。
- 积分分离:当偏差较大时,只使用比例和微分控制;当偏差较小时,再引入积分控制。这样可以避免在偏差较大时,积分项过度累积导致饱和。
- 限幅积分:对积分项的累积值设置一个上限和下限,当积分项超过这个范围时,就将其限制在上限或下限值。
- 应用场景:适用于存在执行器饱和限制的控制系统,如电机调速系统、温度控制系统等。例如,在电机调速系统中,当电机已经达到最大转速,但偏差仍然存在时,如果不采取抗积分饱和措施,积分项会不断累积,导致控制器输出持续增大,无法有效控制电机转速。
带死区PID
- 原理:在某些控制系统中,当偏差较小时,可能不需要进行控制动作,或者控制动作对系统的影响可以忽略不计。带死区PID就是在偏差小于某个设定的死区值时,控制器输出为零,不进行控制;当偏差大于死区值时,再按照正常的PID控制规律进行计算和控制。死区值的设置可以根据系统的实际需求和精度要求来确定。
- 应用场景:适用于对控制精度要求不是特别高,且存在频繁小偏差的系统。例如,在一些机械传动系统中,由于机械部件的磨损和间隙等因素,可能会产生一些微小的偏差。如果对这些微小偏差也进行控制,可能会导致控制动作过于频繁,反而影响系统的稳定性和寿命。采用带死区PID控制,可以有效减少控制动作的频率,提高系统的可靠性。
不完全微分
- 原理:在标准的PID控制中,微分项是对偏差的瞬时变化率进行控制,它能够快速响应偏差的变化,提高系统的动态性能。但是,微分项也会对噪声和高频干扰比较敏感,容易导致控制输出出现高频振荡。不完全微分就是在微分项中引入一个低通滤波环节,对微分信号进行滤波处理,降低噪声和高频干扰的影响,使微分项更加平滑稳定。常见的不完全微分形式有:
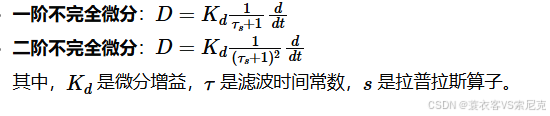
- 应用场景:适用于存在噪声和高频干扰的控制系统,如传感器信号带有噪声的温度控制系统、压力控制系统等。通过采用不完全微分,可以有效抑制噪声和干扰对控制输出的影响,提高系统的控制精度和稳定性。
微分先行
- 原理:在标准的PID控制中,当设定值(目标值)发生变化时,由于积分项和微分项都是基于偏差进行计算的,所以控制输出的响应会受到一定延迟。微分先行(也称为设定值微分)就是在计算控制输出时,将设定值的变化也引入到微分项中,使控制器能够更快地响应设定值的变化。其计算公式为:
[ u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{d}{dt} [r(t) - y(t)] ]
其中,( u(t) ) 是控制输出,( K_p ) 是比例增益,( K_i ) 是积分增益,( K_d ) 是微分增益,( e(t) ) 是偏差,( r(t) ) 是设定值,( y(t) ) 是被控量。 - 应用场景:适用于对设定值变化响应速度要求较高的系统,如快速定位系统、快速温度调节系统等。例如,在一个快速定位系统中,当目标位置发生变化时,采用微分先行的PID控制可以使系统更快地响应目标位置的变化,减少定位时间,提高系统的动态性能。
这些PID控制的改进手段可以根据不同的控制对象和控制要求进行选择和组合,以达到最佳的控制效果。在实际应用中,还需要通过实验和调试来确定各个参数的最优值,以适应具体的控制系统。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











