







 文章探讨了视觉产生的原理,特别是在不同光照条件下的明视觉和暗视觉状态。明视觉在高照度下,由锥状细胞主导,具有丰富的色感;暗视觉在低照度下,由杆状细胞主导,无法分辨颜色。理解这些视觉机制对于优化夜间照明设计至关重要,特别是要考虑到人眼在不同亮度下的视觉灵敏度和光谱响应变化。
文章探讨了视觉产生的原理,特别是在不同光照条件下的明视觉和暗视觉状态。明视觉在高照度下,由锥状细胞主导,具有丰富的色感;暗视觉在低照度下,由杆状细胞主导,无法分辨颜色。理解这些视觉机制对于优化夜间照明设计至关重要,特别是要考虑到人眼在不同亮度下的视觉灵敏度和光谱响应变化。
1.视觉的产生
光被照射到的物体反射后刺击人的视觉系统,产生了“视觉”。产生视觉是进行夜景照明的蕞终目的,其效果直接决定着夜景照明的质量,并且影响了大多数人的夜心理与夜行为,了解人的视觉产生规律是获得景观照明蕞佳效果的前提。
明视觉”与“暗视觉”。人体眼球的视网膜上分布着两种感光细胞:杆状细胞和锥状细胞。这两种细胞对光的感受度不同。杆状细胞对光的感受性很高,而锥状细胞对光的感受性较低,但是杆状细胞不能分辨颜色,只有当锥状细胞感受到光的刺击时才有色觉。杆状细胞和锥状细胞的不同特性形成了眼睛的两种视觉:“明视觉”与“暗视觉”。
在照度较高的条件下,眼睛处于明视觉状态,锥状细胞工作,有丰富的色感;而在低照度下,眼睛处于暗视觉状态,杆状细胞工作,能感受到极弱的光,但物体看上去却是灰濛濛的。夜晚,人的眼睛一般处于暗视觉状态,所以,如果要在夜晚突出建筑物的精彩部位或者景观的高潮,最好使用人眼对其视觉灵敏度高的光线。人眼在明视觉与暗视觉状态下对光的视觉灵敏度是不一样,而且在可见光谱范围内的视觉灵敏度也不均匀,它随波长而变化,同抛物线的形状。
2.明视觉和暗视觉的定义
由于人眼存在的两种光感受器细胞--视锥和视杆下拨的不同特性,人眼的视觉根据亮度的变化可分为明视觉、暗视觉和中间视觉。
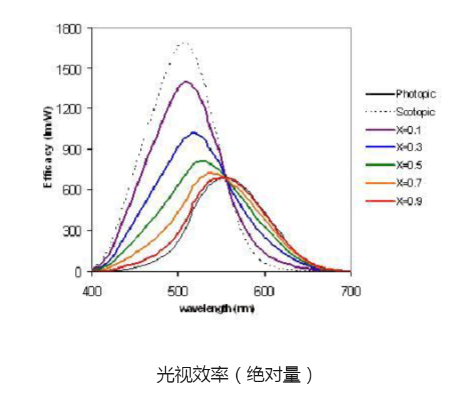
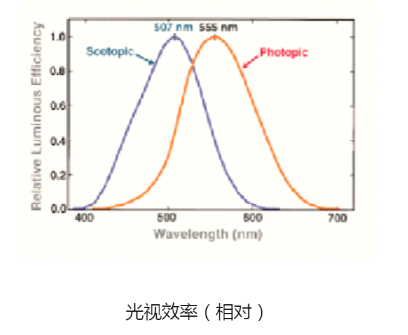
根据国际照明学会(CIE)1983年的定义,明视觉指亮度超过几个cd/平方米(通常认为超过3cd/平方米)的环境,此时视觉主要由视锥细胞起作用,最大的视觉响应在光谱蓝绿区间的555nm处;暗视觉指环境亮度低于0.001cd/平方米时的视觉,此时视杆细胞是主要作用的感光细胞,光谱光视效率的峰值约在507nm;中间视觉介于明视觉和暗视觉亮度之间,此时人眼的视锥和视杆细胞同时响应,并且随着亮度的变化,两种细胞的活跃程度也发生变化。
一般白天晴朗的太阳到晚上台灯的照明,都是在明视觉范围内;而道路照明和明朗的月夜下,为中间视觉照明;昏暗的星空下就是暗视觉。人眼的明视觉和暗视觉特征如下表所示,中间视觉介于明视觉和暗视觉之间。
| 特征 | 明视觉 | 暗视觉 |
| 光感受器 | 视锥细胞 | 视杆细胞 |
| 光化学物质 | 锥体色素 | 视紫红质 |
| 色觉 | 正常的三色 | 无色 |
| 所在视网膜区域 | 中心 | 周边 |
| 暗适应速度 | 快(8分钟或更少) | 慢(30分钟或更多) |
| 空间分辨能力 | 高 | 低 |
| 时间辨别 | 反应快 | 反应慢 |
| 照明水平 | 昼光(>3cd/平方米) | 夜光(<0.001cd/平方米) |
| 光谱灵敏峰值 | 555nm | 507nm |
在中间视觉状态下,人眼视网膜上的两种光感受器细胞--视锥和视杆细胞同时发生作用,当适应亮度逐渐由明到暗时,光谱灵敏度曲线逐步向短波方向移动,这种现象称为普尔金偏移(Purkinje Shift)。由于这种偏移,对于夜间照明的涉及、测量和计算仍沿用明视觉光谱光视效率 的基础将产生不恰当的甚至时错误的结果。目前国际上照明界越来越多的专家注意到这一现象,并从各方面研究中间视觉照明下的特性及其对夜间照明的应用的影响。
的基础将产生不恰当的甚至时错误的结果。目前国际上照明界越来越多的专家注意到这一现象,并从各方面研究中间视觉照明下的特性及其对夜间照明的应用的影响。
-
- 光谱光视效率
有待补充

















 377
377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









