







 超级会员免费看
超级会员免费看
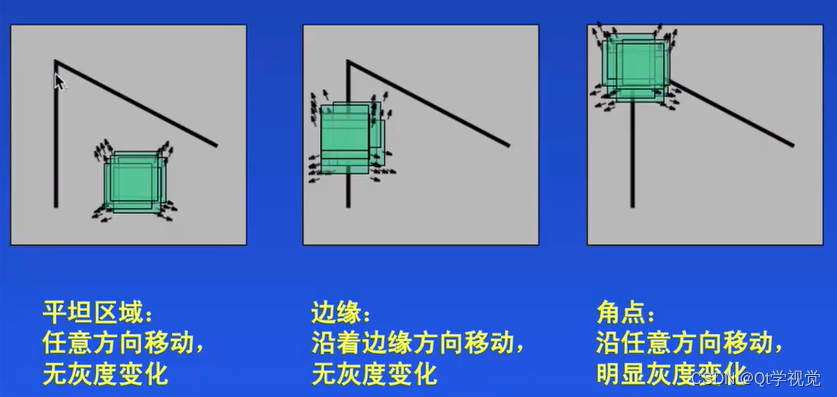
原理:
Harris角点检测的思想是通过图像的局部的小窗口观察图像,角点的特征是窗口沿任意方向移动都会导致图像灰度的明显变化,如下图所示
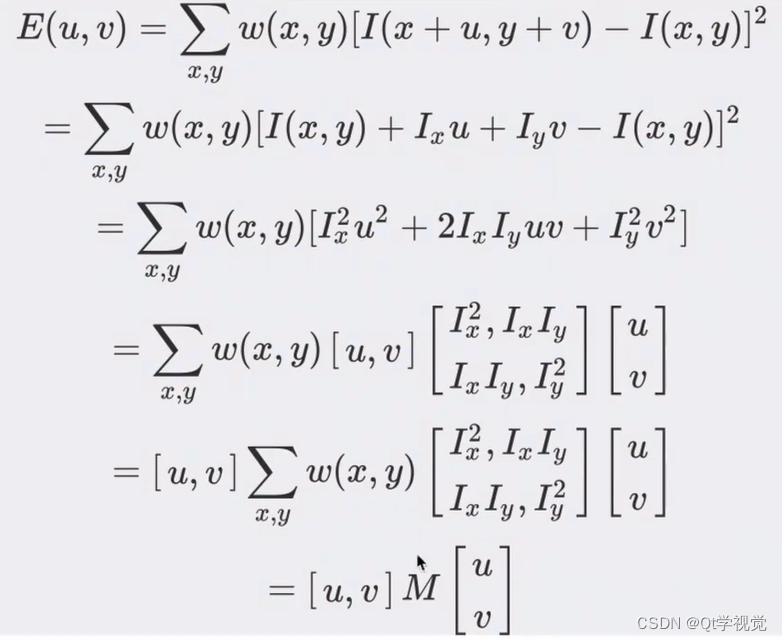
将上述思想转换为数学形式,即将局部窗口向各个方向移动(u,v)并计算所有灰度差异的总和,表达式如下:

其中
 是局部窗口的图像灰度,
是局部窗口的图像灰度,
 是平移后的图像灰度,
是平移后的图像灰度,
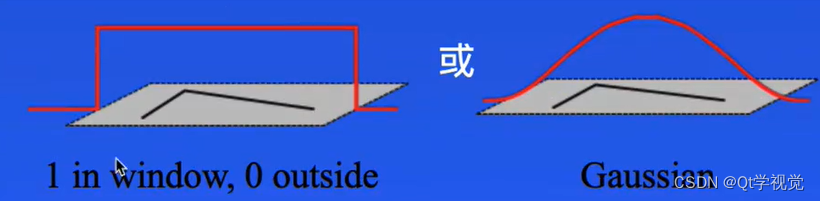
 是窗口函数,该可以是矩形窗口,也可以是对每一个像素赋予不同权重的高斯窗口,如下所示:
是窗口函数,该可以是矩形窗口,也可以是对每一个像素赋予不同权重的高斯窗口,如下所示:
角点检测中使
 的值最大,利用一阶泰勒展开有
的值最大,利用一阶泰勒展开有
其中
 和
和
 是沿x和y方向的导数,可用sobel算子计算。
是沿x和y方向的导数,可用sobel算子计算。
推导如下:
M矩阵决定了
 的取值,下面我们利用M来求角点,M是
的取值,下面我们利用M来求角点,M是
 和
和
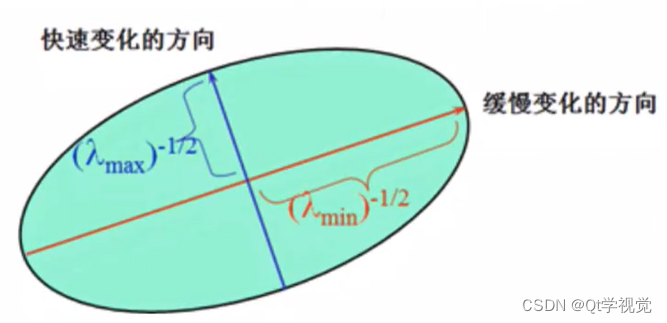
 的二次函数,可以表示成椭圆的形状,椭圆的长短半轴由M的特征值
的二次函数,可以表示成椭圆的形状,椭圆的长短半轴由M的特征值
 和
和
 决定,方向由特征矢量决定,如下图所示:
决定,方向由特征矢量决定,如下图所示:
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。

共可分为三种情况:
图像中的直线。一个特征值大,另一个特征值小,
 或
或
 ,椭圆函数值在某一个方向上大,在其他方向上小
,椭圆函数值在某一个方向上大,在其他方向上小
图像中的平面。两个特征值都小,且近似相等;椭圆函数数值在各个方向上都小
图像中的角点,两个特征值都大,且近似相等,椭圆函数在所有方向都增大
Harris给出的角点计算方法并不需要计算具体的特征值,而是计算一个角点响应值R来判断角点。R的计算公式为
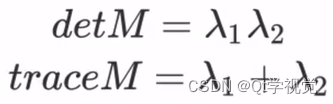
其中,detM为矩阵M的行列式;traceM为矩阵M的迹;@为常数,取值范围为0.04-0.06.事实上,特征是隐含在detM和traceM中,因为:
那我们怎么判断角点呢?如下图所示
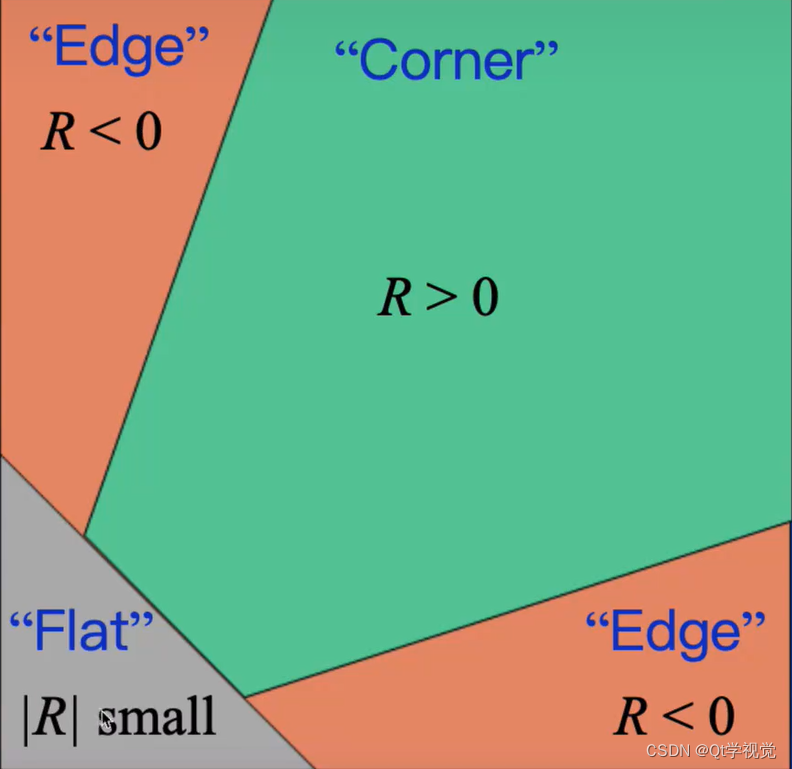
当R为大数值的正数时是角点
当R为大数值的负数时是边界
当R为小数是认为平坦区域
void cv::cornerHarris
(
InputArray src,
OutputArray dst,
int blockSize,
int ksize,
double k,
int borderType = BORDER_DEFAULT
)
sr:c输入单通道8位或浮点图像。
dst:图像,用于存储Harris探测器响应。它的类型为CV_32FC1,大小与src相同
blockSize: 邻域大小
ksize: Sobel算子的光圈参数
k :表示计算角度响应时候的参数大小,默认在0.04~0.06Harris角点检测的优缺点:
优点:
旋转不变性,椭圆转过一定角度但是其形状保持不变(特征值保持不变)
对于图像灰度的仿射变换具有部分的不变性,由于仅仅使用了图像的一阶导数,对于图像灰度平移变化不变,对于图像灰度尺度变化不变
缺点:
对尺度很敏感,不具备几何尺度不变性
提取的角点是像素级的
//Harris角点检测
void WidgetImageProFeature::on_btnHarris_clicked()
{
if (m_srcImage.empty())return;
Mat grayImage;
if (m_srcImage.type() != CV_8UC1)
{
cvtColor(m_srcImage, grayImage, COLOR_BGR2GRAY);
}
else
{
grayImage = m_srcImage.clone();
}
Mat dstImage = Mat::zeros(grayImage.size(), CV_32FC1);
//harris角点核心函数
int blockSize = m_blockSize;//矩阵大小
int ksize = m_ksize;//窗口大小
double k = m_k;//计算角度响应时候的参数大小,默认在0.04~0.06
cornerHarris(grayImage, dstImage, blockSize, ksize, k, BORDER_DEFAULT);
//上述输出的取值范围并不是0-255 需要按照最大最小值进行归一化
Mat normImage, normScaleDst;
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, normScaleDst);
m_dstImage = m_srcImage.clone();
RNG rng(12345);
//用彩色来显示
for (int row = 0; row < m_dstImage.rows; row++)
{
//定义每一行的指针
uchar* currentRow = normScaleDst.ptr(row);
for (int col = 0; col < m_dstImage.cols; col++)
{
int value = (int)*currentRow;
if (value > m_threshold1)
{
circle(m_dstImage, Point(col, row), 1, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), -1, 8, 0);
}
currentRow++;
}
}
emit showImage(m_dstImage);
}
//自定义Harris角点检测
void WidgetImageProFeature::on_btnCustomHarris_clicked()
{
if (m_srcImage.empty())return;
Mat grayImage;
if (m_srcImage.type() != CV_8UC1)
{
cvtColor(m_srcImage, grayImage, COLOR_BGR2GRAY);
}
else
{
grayImage = m_srcImage.clone();
}
// 计算特征值
int blockSize = m_blockSize;//矩阵大小
int ksize = m_ksize;//窗口大小
double k = m_k;//计算角度响应时候的参数大小,默认在0.04~0.06
Mat harris_dst = Mat::zeros(m_srcImage.size(), CV_32FC(6));
Mat harrisRspImg = Mat::zeros(m_srcImage.size(), CV_32FC1);
cornerEigenValsAndVecs(grayImage, harris_dst, blockSize, ksize, 4);
// 计算响应
for (int row = 0; row < harris_dst.rows; row++)
{
for (int col = 0; col < harris_dst.cols; col++)
{
double lambda1 = harris_dst.at<Vec6f>(row, col)[0];
double lambda2 = harris_dst.at<Vec6f>(row, col)[1];
harrisRspImg.at<float>(row, col) = lambda1 * lambda2 - k * pow((lambda1 + lambda2), 2);
}
}
double harris_min_rsp;
double harris_max_rsp;
minMaxLoc(harrisRspImg, &harris_min_rsp, &harris_max_rsp, 0, 0, Mat());
m_dstImage = m_srcImage.clone();
// quality level
int qualityLevel = 30;
int max_count = 100;
float tharris = harris_min_rsp + (((double)qualityLevel) / max_count) * (harris_max_rsp - harris_min_rsp);
RNG rng(12345);
for (int row = 0; row < m_srcImage.rows; row++)
{
for (int col = 0; col < m_srcImage.cols; col++)
{
float v = harrisRspImg.at<float>(row, col);
if (v > tharris)
{
circle(m_dstImage, Point(col, row), 1, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), -1, 8, 0);
}
}
}
emit showImage(m_dstImage);
}
















 3512
3512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











