







原Blog:http://blog.csdn.net/poem_qianmo/article/details/25560901
一、关于边缘检测
在具体介绍之前,先来一起看看边缘检测的一般步骤吧。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
另外,需要注意,下文中讲到的Laplace算子,sobel算子和Scharr算子都是带方向的,所以,示例中我们分别写了X方向,Y方向和最终合成的的效果图。
二、canny算子篇
2.1 canny算子相关理论与概念讲解
2.1.1 canny算子简介
Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory ofedge detection),解释了这项技术是如何工作的。Canny边缘检测算法以Canny的名字命名,被很多人推崇为当今最优的边缘检测的算法。
其中,Canny 的目标是找到一个最优的边缘检测算法,让我们看一下最优边缘检测的三个主要评价标准:
1.低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
2.高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
3.最小响应: 图像中的边缘只能标识一次,并且可能存在的图像噪声不应标识为边缘。
为了满足这些要求 Canny 使用了变分法,这是一种寻找满足特定功能的函数的方法。最优检测使用四个指数函数项的和表示,但是它非常近似于高斯函数的一阶导数。
2.1.2 Canny 边缘检测的步骤
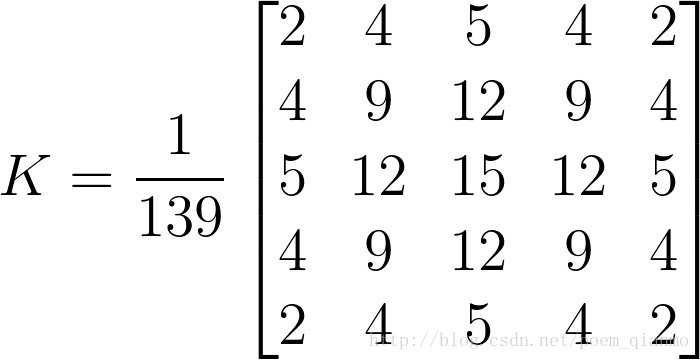
1.消除噪声。 一般情况下,使用高斯平滑滤波器卷积降噪。 如下显示了一个 size = 5 的高斯内核示例:
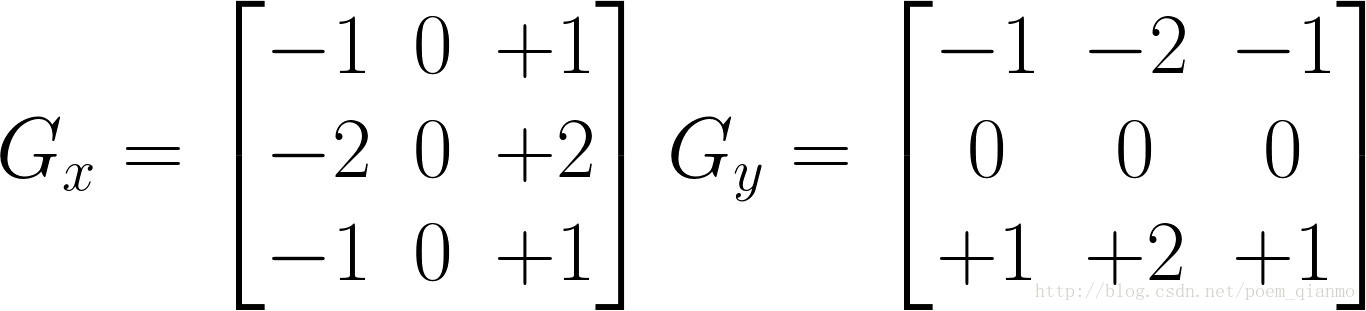
2.计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤。
Ⅰ.运用一对卷积阵列 (分别作用于 x 和 y 方向):
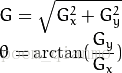
Ⅱ.使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般为0, 45, 90, 135)
3.非极大值抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值。最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
Ⅰ.如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
Ⅱ.如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
Ⅲ.如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
tips:对于Canny函数的使用,推荐的高低阈值比在2:1到3:1之间。
三、sobel算子篇
3.1 sobel算子相关理论与概念讲解
3.1.1 基本概念
Sobel 算子是一个主要用作边缘检测的离散微分算子 (discrete differentiation operator)。 它Sobel算子结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
3.1.2 sobel算子的计算过程
我们假设被作用图像为 I.然后进行如下的操作
1.分别在x和y两个方向求导。
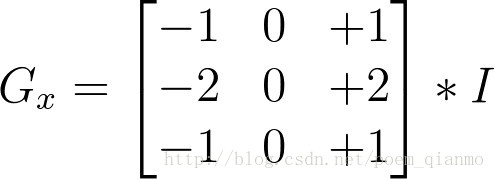
Ⅰ.水平变化: 将 I 与一个奇数大小的内核
进行卷积。比如,当内核大小为3时,
Ⅱ.垂直变化: 将: I 与一个奇数大小的内核
进行卷积。比如,当内核大小为3时,
2.在图像的每一点,结合以上两个结果求出近似梯度:
另外有时,也可用下面更简单公式代替:
四、Laplace算子篇
4.1 Laplace算子相关理论与概念讲解
Laplacian 算子是n维欧几里德空间中的一个二阶微分算子,定义为梯度grad()的散度div()。因此如果f是二阶可微的实函数,则f的拉普拉斯算子定义为:
(1) f的拉普拉斯算子也是笛卡儿坐标系xi中的所有非混合二阶偏导数求和:
(2) 作为一个二阶微分算子,拉普拉斯算子把C函数映射到C函数,对于k ≥ 2。表达式(1)(或(2))定义了一个算子Δ :C(R) → C(R),或更一般地,定义了一个算子Δ : C(Ω) → C(Ω),对于任何开集Ω。
根据图像处理的原理我们知道,二阶导数可以用来进行检测边缘 。 因为图像是 “二维”, 我们需要在两个方向进行求导。使用Laplacian算子将会使求导过程变得简单。
Laplacian 算子的定义:
需要点破的是,由于 Laplacian使用了图像梯度,它内部的代码其实是调用了 Sobel 算子的。
另附一个小tips:让一幅图像减去它的Laplacian可以增强对比度。
五、scharr滤波器篇
scharr一般我就直接称它为滤波器,而不是算子。
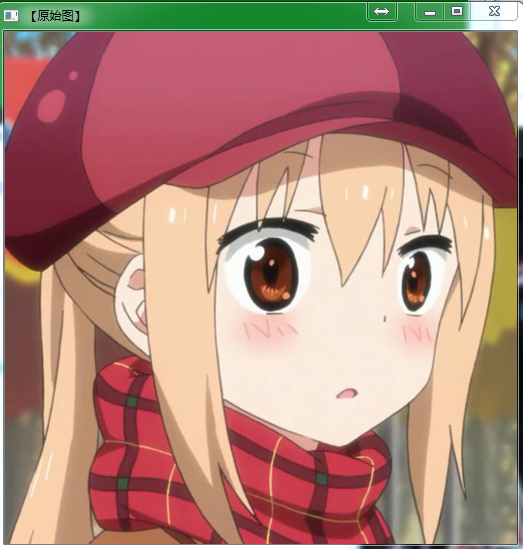
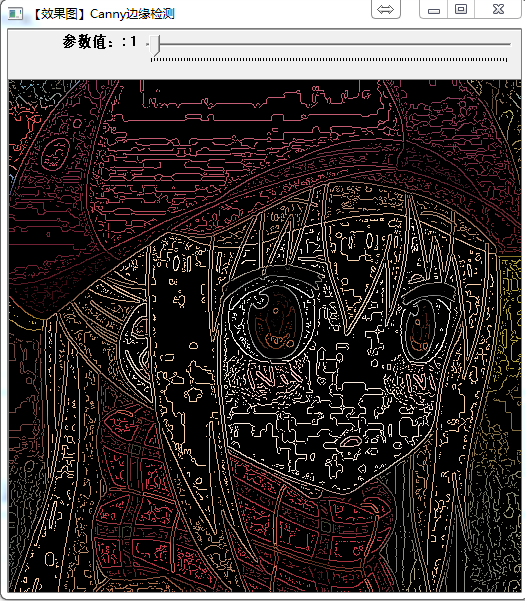
六、综合示例篇
原图片
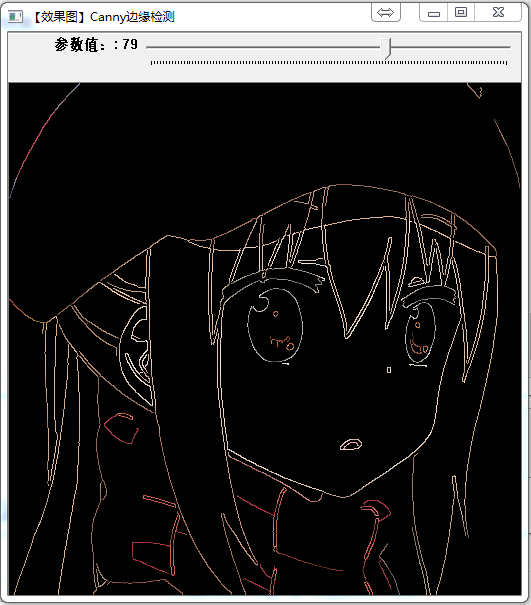
canny边缘检测效果图:
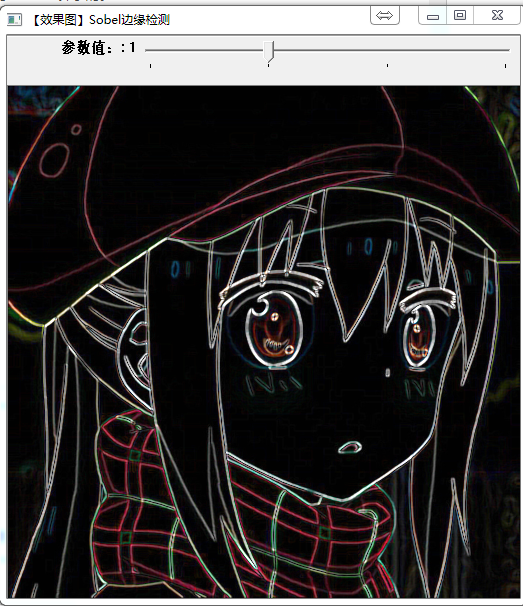
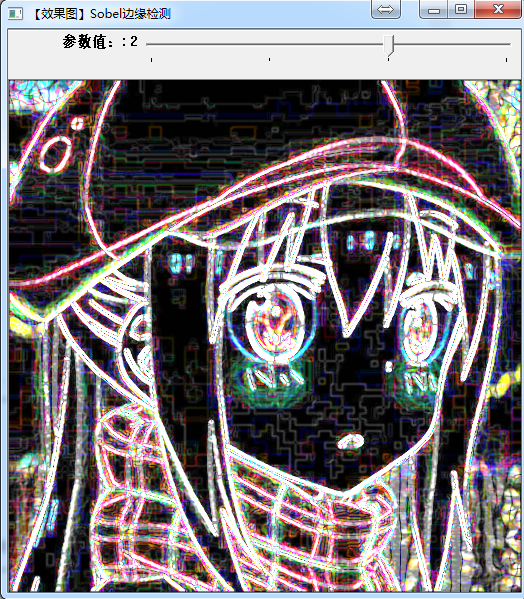
Sobel边缘检测:
Scharr滤波器:
















 7211
7211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









