






rtabmap报错:
[ERROR] [1543925315.476500304]: Failed to load nodelet [/obstacles_detection] of type [rtabmap_ros/obstacles_detection]
even after refreshing the cache: Failed to load library /opt/ros/kinetic/lib//librtabmap_ros.so. Make sure that you are
calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names are consistent between this macro and your
XML. Error string: Could not load library (Poco exception = librtabmap_core.so.0.11: cannot open shared object file:
No such file or directory)
[ERROR] [1543925315.477945304]: The error before refreshing the cache was: Failed to load library /opt/ros/kinetic/lib//li
brtabmap_ros.so. Make sure that you are calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names
are consistent between this macro and your XML. Error string: Could not load library (Poco exception = librtabmap_cor
e.so.0.11: cannot open shared object file: No such file or directory)
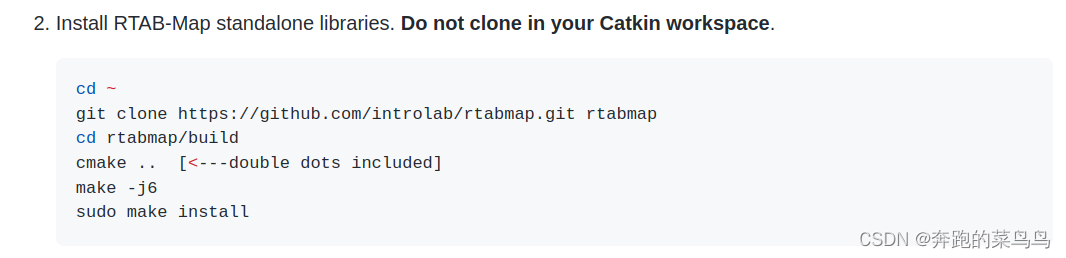
解决方案:
重新编译一遍:https://github.com/introlab/rtabmap_ros#ros-distribution
执行到此步即可:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











