







Vision-Based Parking-Slot Detection: A Benchmark and A Learning-Based Approach
Introduction
提出了一种基于学习的停车槽检测方法PSDL。使用PSDL,给定一个环境视图图像,首先检测标记点,然后推断出有效的停车插槽。
PSDL: A Learning Based Approach for Detecting Parking-Slots
Marking-Point Detection
设计了一种二进制分类器,该分类器以局部图像patch为输入,输出一个二进制值,该二进制值指示输入是否是标记点模式。为了训练标记点检测器,需要确定特征和分类器模型。关于特征,使用了三种类型的特征。第一个特征是标准化强度。给定图像(x),其偏导数Gx(x)和Gy(x)可通过Sobel梯度算子对图像I(x)进行滤波计算。最后一类特征是梯度大小。在分类器方面,我们采用了流行的AdaBoost框架。在检测阶段,如果使用base AdaBoost分类器,速度会很慢。级联结构是一种减少在整个图像[52]上计算复杂分类器的计算负担的常用方法。为了简化训练,我们使用“恒软级联”策略[53]来代替真正的级联结构。
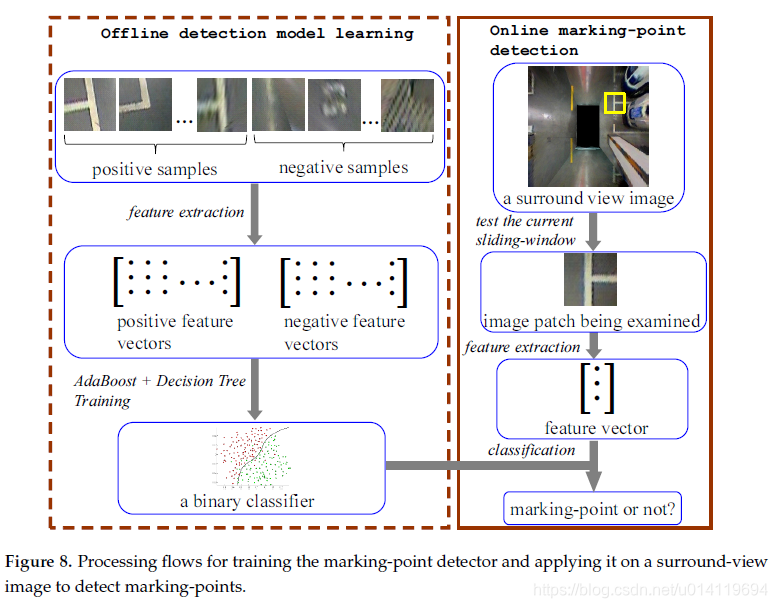
需要考虑的另一个问题是,由于标记点模式可以是任意方向的,单个检测器的精确度不够。因此,我们训练多个检测器,每个检测器负责检测方向在特定范围内的标记点模式。为了训练多个检测器,在标记点模式的正样本时,除了标记它们的位置外,还标记它们的方向。
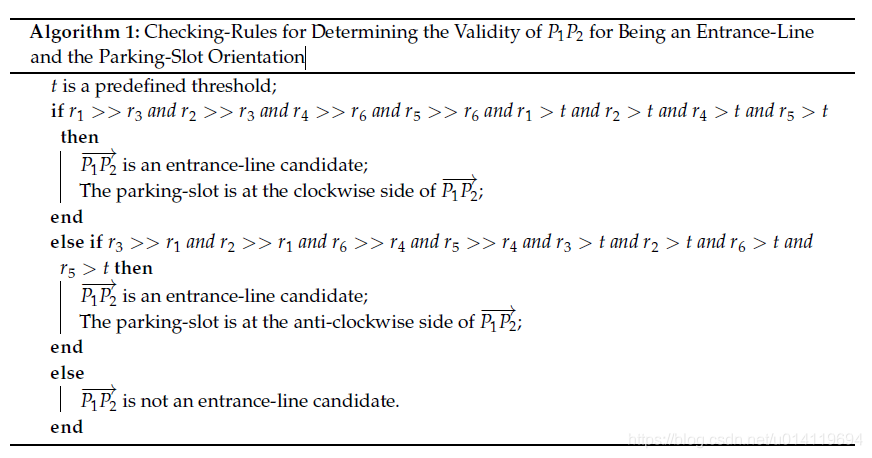
Parking-Slot Inference














 2438
2438











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









