







 该博客介绍了如何使用梯形加减速算法控制步进电机,以给定的步数和速度参数实现顺时针或逆时针移动。在算法中,计算了加速和减速过程中的步数限制,确保电机平滑地从静止加速到最大速度,然后减速到停止。在中断服务程序中,动态调整脉冲周期以实现加减速效果。整个过程考虑了最小延迟和最大速度的限制,保证了运动的精确控制。
该博客介绍了如何使用梯形加减速算法控制步进电机,以给定的步数和速度参数实现顺时针或逆时针移动。在算法中,计算了加速和减速过程中的步数限制,确保电机平滑地从静止加速到最大速度,然后减速到停止。在中断服务程序中,动态调整脉冲周期以实现加减速效果。整个过程考虑了最小延迟和最大速度的限制,保证了运动的精确控制。
梯形加减速算法

/*! \brief 以给定的步数移动步进电机
* 通过计算加速到最大速度,以给定的步数开始减速
* 如果加速度和减速度很小,步进电机会移动很慢,还没达到最大速度就要开始减速
* \param step 移动的步数 (正数为顺时针,负数为逆时针).
* \param accel 加速度,如果取值为10,实际值为10*0.1*rad/sec^2=1rad/sec^2
* \param decel 减速度,如果取值为10,实际值为10*0.1*rad/sec^2=1rad/sec^2
* \param speed 最大速度,如果取值为10,实际值为10*0.1*rad/sec=1rad/sec
*/
void stepper_move_T( int32_t step, uint32_t accel, uint32_t decel, uint32_t speed)
{
//达到最大速度时的步数.
unsigned int max_s_lim;
//必须开始减速的步数(如果还没加速到达最大速度时)。
unsigned int accel_lim;
/*根据步数和正负判断*/
if(step == 0)
{
return ;
}
else if(step < 0)//逆时针
{
srd.dir = CCW;
step = -step;
}
else//顺时针
{
srd.dir = CW;
}
// 输出电机方向
MOTOR_DIR(srd.dir);
// 如果只移动一步
if(step == 1)
{
// 只移动一步
srd.accel_count = -1;
// 减速状态
srd.run_state = DECEL;
// 短延时
srd.step_delay = 1000;
// 配置电机为运行状态
status.running = TRUE;
}
// 步数不为零才移动
else if(step != 0)
{
// 设置最大速度极限, 计算得到min_delay用于定时器的计数器的值。
// min_delay = (alpha / tt)/ w
srd.min_delay = (int32_t)(A_T_x10/speed);
// 通过计算第一个(c0) 的步进延时来设定加速度,其中accel单位为0.1rad/sec^2
// step_delay = 1/tt * sqrt(2*alpha/accel)
// step_delay = ( tfreq*0.676/10 )*10 * sqrt( (2*alpha*100000) / (accel*10) )/100
srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10);
// 计算多少步之后达到最大速度的限制
// max_s_lim = speed^2 / (2*alpha*accel)
max_s_lim = (uint32_t)(speed*speed/(A_x200*accel/10));
// 如果达到最大速度小于0.5步,我们将四舍五入为0
// 但实际我们必须移动至少一步才能达到想要的速度
if(max_s_lim == 0)
{
max_s_lim = 1;
}
// 计算多少步之后我们必须开始减速
// n1 = (n1+n2)decel / (accel + decel)
accel_lim = (uint32_t)(step*decel/(accel+decel));
// 我们必须加速至少1步才能才能开始减速.
if(accel_lim == 0)
{
accel_lim = 1;
}
// 使用限制条件我们可以计算出第一次开始减速的位置
//srd.decel_val为负数
if(accel_lim <= max_s_lim)
{
srd.decel_val = accel_lim - step;
}
else{
srd.decel_val = -(max_s_lim*accel/decel);
}
// 当只剩下一步我们必须减速
if(srd.decel_val == 0)
{
srd.decel_val = -1;
}
// 计算开始减速时的步数
srd.decel_start = step + srd.decel_val;
// 如果最大速度很慢,我们就不需要进行加速运动
if(srd.step_delay <= srd.min_delay)
{
srd.step_delay = srd.min_delay;
srd.run_state = RUN;
}
else
{
srd.run_state = ACCEL;
}
// 复位加速度计数值
srd.accel_count = 0;
status.running = TRUE;
}
/*获取当前计数值*/
int tim_count=__HAL_TIM_GET_COUNTER(&TIM_TimeBaseStructure);
/*在当前计数值基础上设置定时器比较值*/
__HAL_TIM_SET_COMPARE(&TIM_TimeBaseStructure,MOTOR_PUL_CHANNEL_x,tim_count+srd.step_delay/2);
/*使能定时器通道*/
TIM_CCxChannelCmd(MOTOR_PUL_TIM, MOTOR_PUL_CHANNEL_x, TIM_CCx_DISABLE);
__HAL_TIM_ENABLE_IT(&TIM_TimeBaseStructure, TIM_IT_CC1);
__HAL_TIM_MOE_ENABLE(&TIM_TimeBaseStructure);
__HAL_TIM_ENABLE(&TIM_TimeBaseStructure);
}
/**
* @brief 速度决策
* @note 在中断中使用,每进一次中断,决策一次
* @retval 无
*/
void speed_decision()
{
uint32_t tim_count=0;
uint32_t tmp = 0;
// 保存新(下)一个延时周期
uint16_t new_step_delay=0;
// 加速过程中最后一次延时(脉冲周期).
static uint16_t last_accel_delay=0;
// 总移动步数计数器
static uint32_t step_count = 0;
static int32_t rest = 0;
//定时器使用翻转模式,需要进入两次中断才输出一个完整脉冲
static uint8_t i=0;
if(__HAL_TIM_GET_IT_SOURCE(&TIM_TimeBaseStructure, MOTOR_TIM_IT_CCx) !=RESET)
{
// 清楚定时器中断
__HAL_TIM_CLEAR_IT(&TIM_TimeBaseStructure, MOTOR_TIM_IT_CCx);
// 设置比较值
tim_count=__HAL_TIM_GET_COUNTER(&TIM_TimeBaseStructure);
tmp = tim_count+srd.step_delay/2;
__HAL_TIM_SET_COMPARE(&TIM_TimeBaseStructure,MOTOR_PUL_CHANNEL_x,tmp);
i++; // 定时器中断次数计数值
if(i==2) // 2次,说明已经输出一个完整脉冲
{
i=0; // 清零定时器中断次数计数值
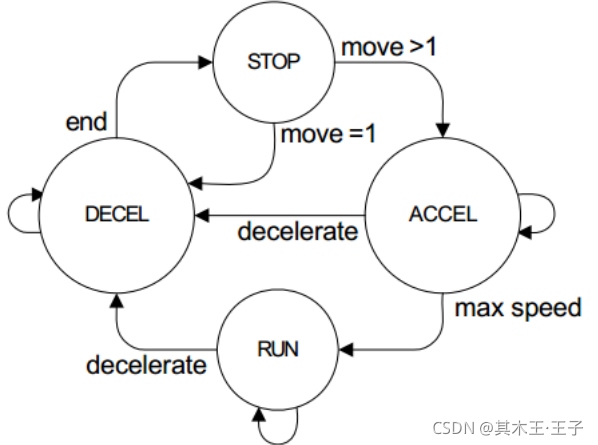
switch(srd.run_state)
{
/*步进电机停止状态*/
case STOP:
step_count = 0; // 清零步数计数器
rest = 0; // 清零余值
// 关闭通道
HAL_TIM_OC_Stop_IT(&TIM_TimeBaseStructure,MOTOR_PUL_CHANNEL_x);
status.running = FALSE;
break;
/*步进电机加速状态*/
case ACCEL:
TIM_CCxChannelCmd(MOTOR_PUL_TIM, MOTOR_PUL_CHANNEL_x, TIM_CCx_ENABLE);
step_count++;
srd.accel_count++;
new_step_delay = srd.step_delay - (((2 *srd.step_delay) + rest)/(4 * srd.accel_count + 1));//计算新(下)一步脉冲周期(时间间隔)
rest = ((2 * srd.step_delay)+rest)%(4 * srd.accel_count + 1);// 计算余数,下次计算补上余数,减少误差
//检查是够应该开始减速
if(step_count >= srd.decel_start) {
srd.accel_count = srd.decel_val;
srd.run_state = DECEL;
}
//检查是否到达期望的最大速度
else if(new_step_delay <= srd.min_delay) {
last_accel_delay = new_step_delay;
new_step_delay = srd.min_delay;
rest = 0;
srd.run_state = RUN;
}
break;
/*步进电机最大速度运行状态*/
case RUN:
step_count++;
new_step_delay = srd.min_delay;
//检查是否需要开始减速
if(step_count >= srd.decel_start)
{
srd.accel_count = srd.decel_val;
//以最后一次加速的延时作为开始减速的延时
new_step_delay = last_accel_delay;
srd.run_state = DECEL;
}
break;
/*步进电机减速状态*/
case DECEL:
step_count++;
srd.accel_count++;
new_step_delay = srd.step_delay - (((2 * srd.step_delay) + rest)/(4 * srd.accel_count + 1)); //计算新(下)一步脉冲周期(时间间隔)
rest = ((2 * srd.step_delay)+rest)%(4 * srd.accel_count + 1);// 计算余数,下次计算补上余数,减少误差
//检查是否为最后一步
if(srd.accel_count >= 0)
{
srd.run_state = STOP;
}
break;
}
/*求得下一次间隔时间*/
srd.step_delay = new_step_delay;
}
}
}

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









