









RS422一主多从MAX3490
最近项目用到了RS422一主多从,一个主机4个从机。芯片用的MAX3490,几经折腾,最终只能从一拖4改为一拖2。
主机发送端,从机4个接收端都是正常的,没有问题。波形非常完美,没有太大变形
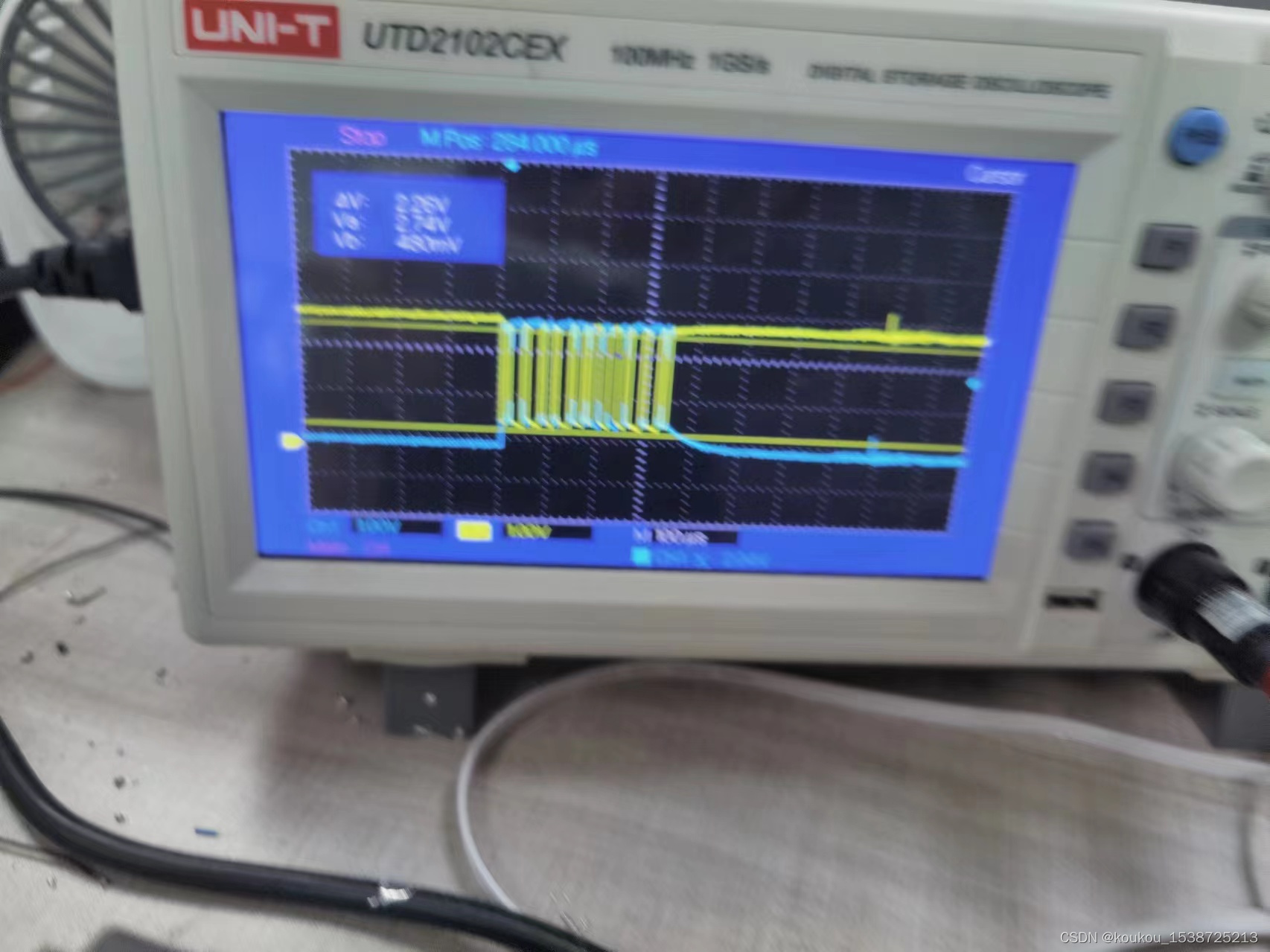
然而从机发送端TX+TX-波形就有很大的问题,TX+TX-波形没有了交会点,经分析原理应该是TX端几个从机电平相互干扰了,基于这个怀疑,我们在TX端加了二极管,使信号单相导通不至于相互干扰。
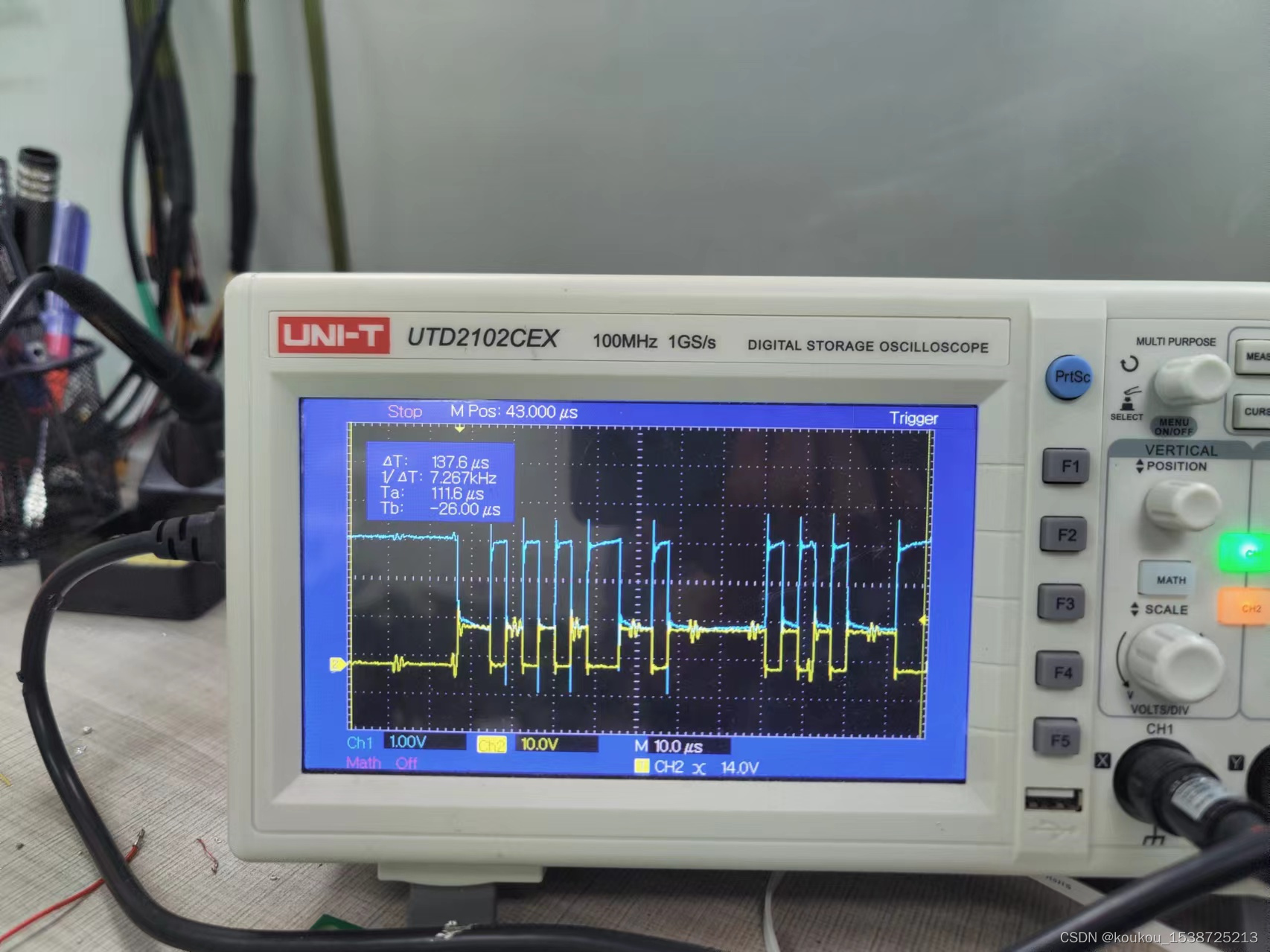
加了二极管后的波形
然后经过原理分析,发现二极管只管正向导通,不管下降沿,就是通信速率太快了二极管没办法传递信号了。所以还是有问题。
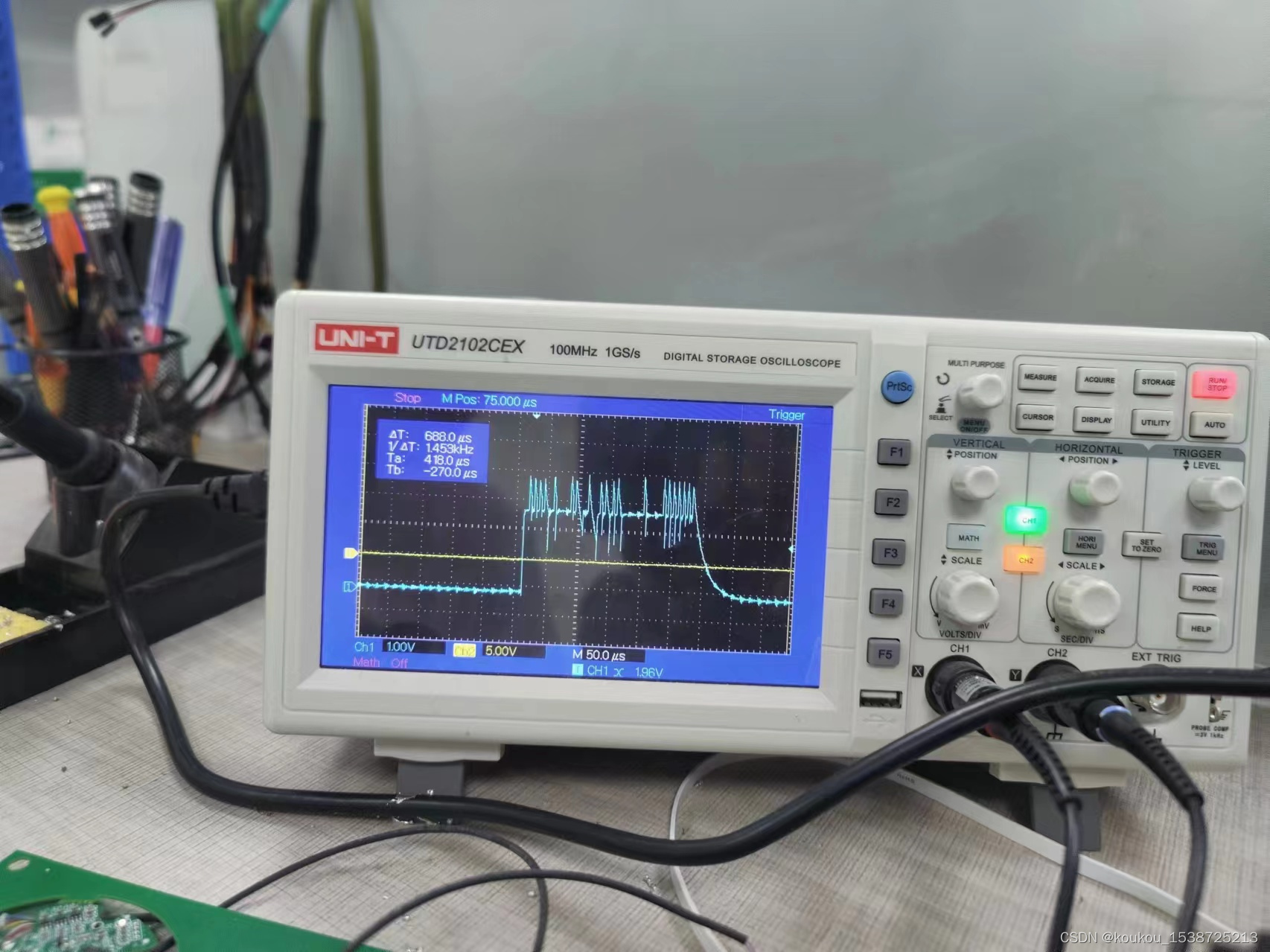
很明显的看到信号下降沿时二极管内部电容就起作用了,下降缓冲比较慢,只要通信速率起来了信号就没办法传递。
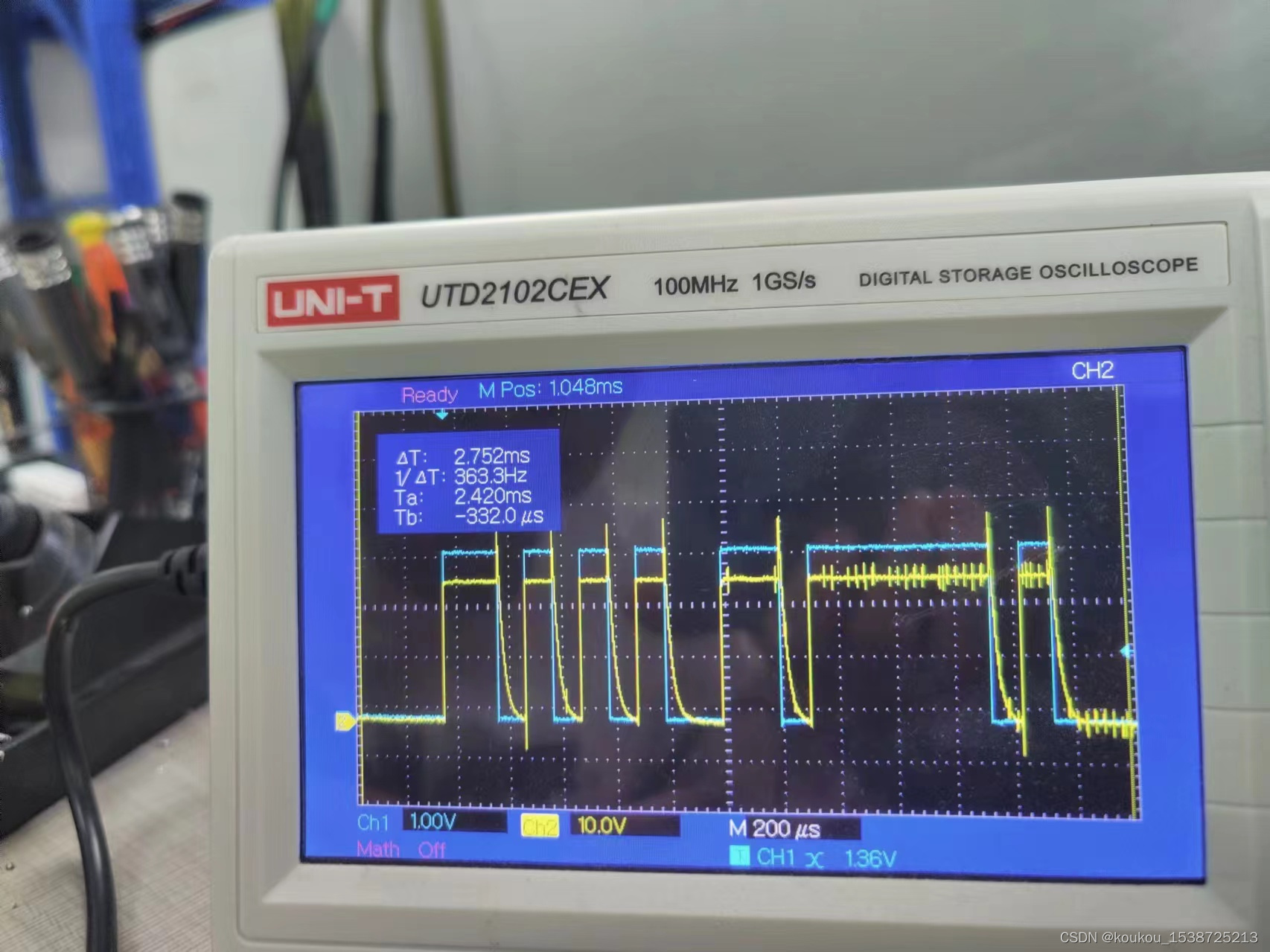
基于此,我们又想了一个新的方案:想办法让TX+TX-没办法交会的电平交会起来,那么就是TX+加上拉,TX-加下拉。效果如下
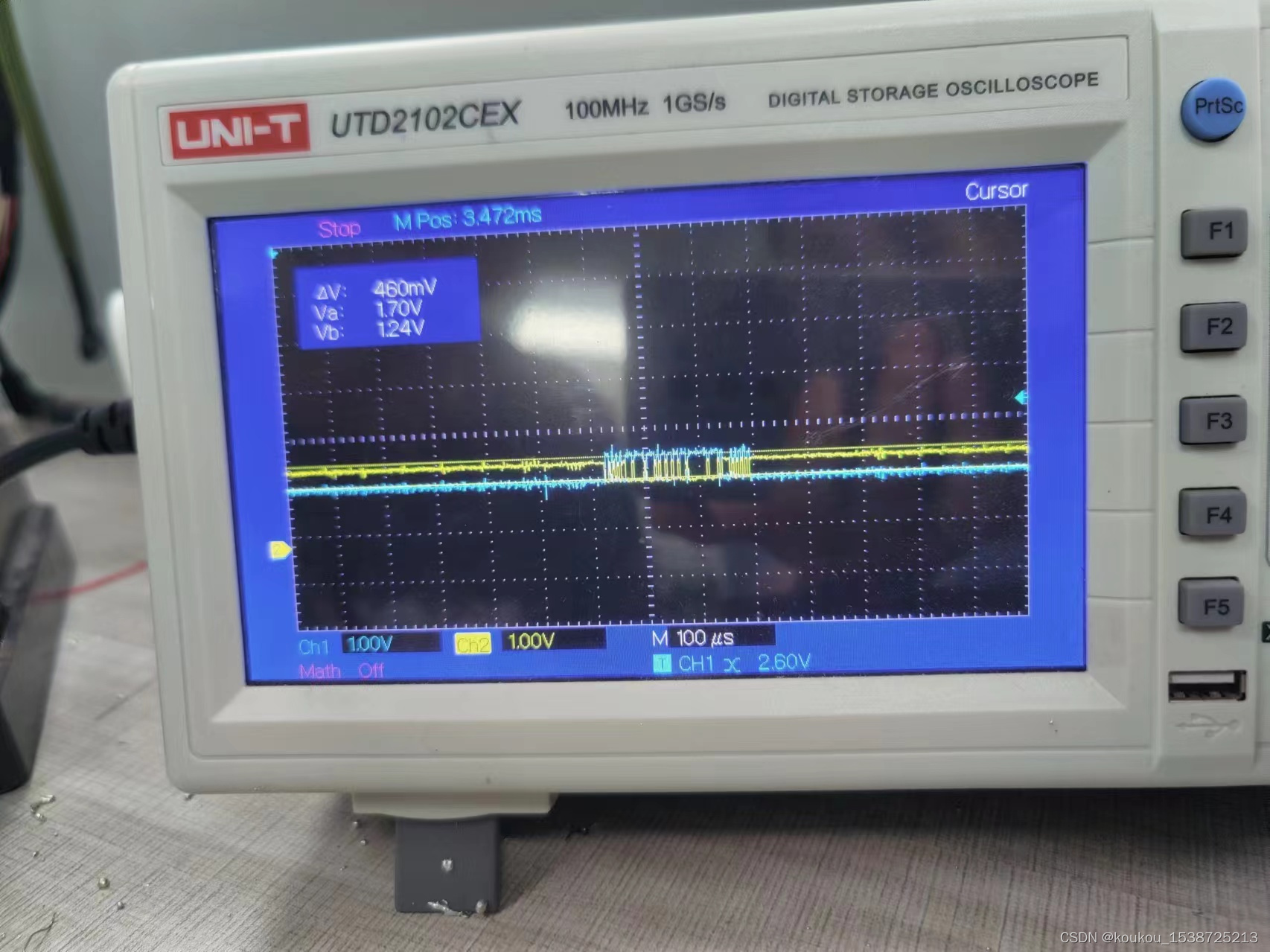
这下就有了交会了,经分析max规格书,只要交汇处电平宽度有0.2V,就能解析信号,至此,RS422告一段落。

















 3281
3281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









