






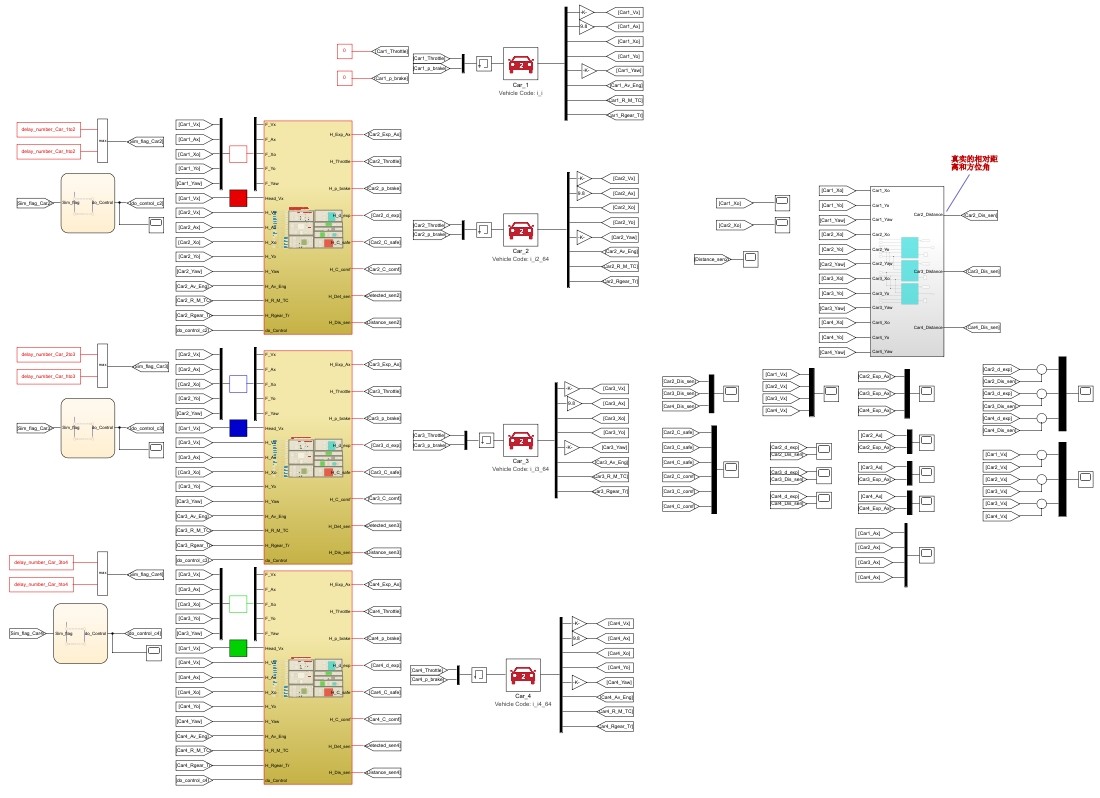
CACC(协同式自适应巡航)模型,使用了Carsim2016和Matlab2018b以上版本的仿真软件。在这个项目中,我们建立了四辆车在Carsim和Simulink中进行协同式自适应巡航。其中,我们考虑了领航车速对车辆间距策略的影响,并采用了分层式控制方法。分层式控制器主要包括下层控制和上层控制。下层控制使用了车辆逆纵向动力学模型(包括逆发动机模型),而上层控制则使用了模糊MPC算法来调节相对距离、相对速度和加速度等参数。在这个过程中,模糊逻辑用于在线调整MPC的权重系数,而Stateflow用于进行模式切换。通过这些控制策略,我们实现了定速巡航和车队跟随的工况。
根据你提供的信息,这个项目涉及到自适应巡航、协同式自适应巡航、自动驾驶纵向控制以及模型预测控制算法和模糊推理方法。下面我将对这些领域的基础知识进行延申科普:
1. 自适应巡航(Adaptive Cruise Control,ACC):自适应巡航是一种汽车驾驶辅助系统,它通过使用车辆间的传感器和控制系统来维持与前车的安全距离,并自动调整车辆的速度以保持安全。ACC系统可以根据前车的速度和距离来自动加速和减速,提高驾驶的舒适性和安全性。
2. 协同式自适应巡航(Cooperative Adaptive Cruise Control,CACC):协同式自适应巡航是在自适应巡航的基础上进一步发展的技术,它允许车队中的车辆之间进行通信和协作。CACC系统可以通过车辆间的通信来实现更高级别的协同控制,提高车队的效率和安全性。
3. 自动驾驶纵向控制:自动驾驶纵向控制是指通过控制车辆的加速度和制动来实现自动驾驶系统中的纵向运动控制。这包括控制车辆的速度、跟随前车、保持安全距离等功能。自动驾驶纵向控制通常使用传感器、控制算法和执行器来实现。
4. 模型预测控制算法(Model Predictive Control,MPC):模型预测控制是一种基于数学模型的控制方法,它通过预测系统未来的行为来优化控制策略。MPC算法使用系统模型和优化算法来计算最优控制输入,以实现对系统的良好控制。
5. 模糊推理方法:模糊推理是一种基于模糊逻辑的推理方法,它允许处理不确定性和模糊性的问题。在模糊推理中,输入和输出的值可以是模糊的,而不是确定的。模糊推理方法可以用于调节控制系统中的参数,以适应不确定的环境和变化的条件。
CACC 协同式自适应巡航模型(仿真软件版本:Carsim2016,Matlab2018b及以上)
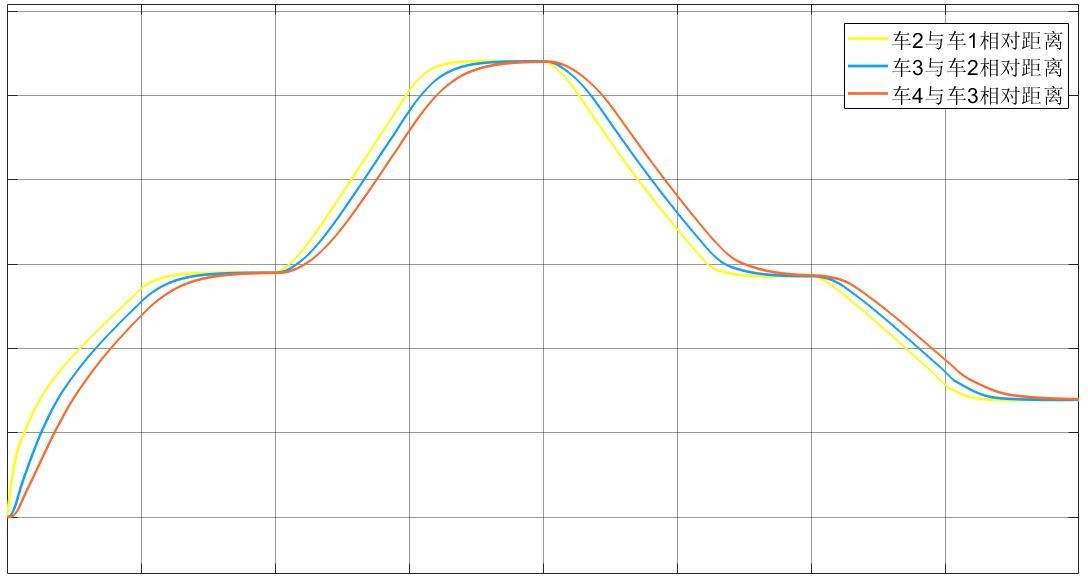
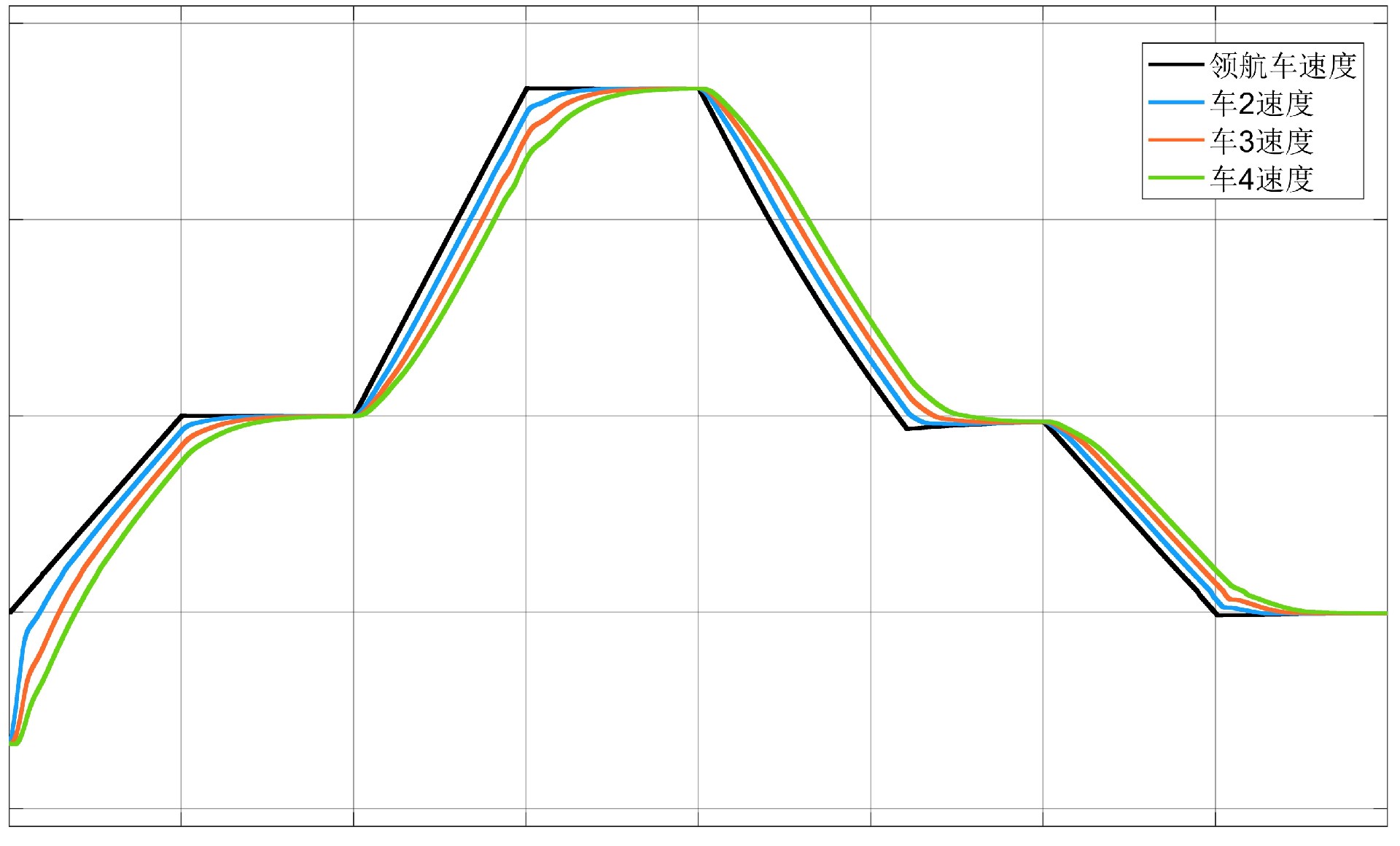
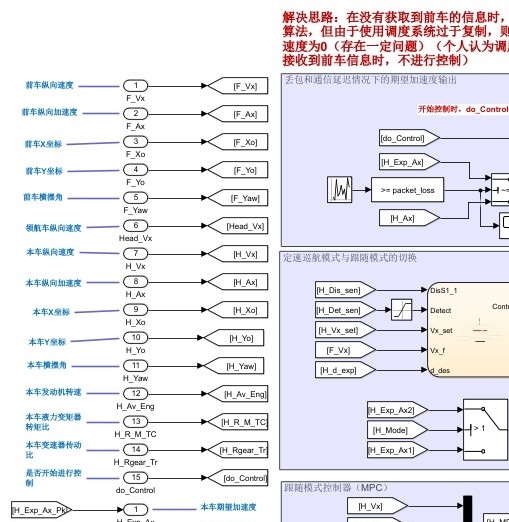
搭建四辆车在carsim和simulink进行协同式自适应巡航,其中间距策略考虑领航车速的影响,各个车辆采用分层式控制,分层式控制器主要分为下层控制(使用车辆逆纵向动力学模型(包括逆发动机模型 ))和上层控制(模糊MPC算法对相对距离,相对速度,加速度等进行调节,其中模糊逻辑对MPC的权重系数进行在线调整,stateflow进行模式切换),实现定速巡航和车队跟随工况。
?模型为本人亲自搭建,附带详细学习资料,适合入门自适应巡航,协同式自适应巡航,自动驾驶纵向控制,同时学习模型预测控制算法和模糊推理方法。
YID:96320688633031253
二斤青柿子
CACC 协同式自适应巡航模型(仿真软件版本:Carsim2016,Matlab2018b及以上)
随着自动驾驶技术的不断发展,CACC(Cooperative Adaptive Cruise Control,协同式自适应巡航)成为了汽车行业一个备受关注的技术领域。CACC技术通过车队中各个车辆之间的协同合作,实现了车队跟随与维持安全的目标。本文将介绍如何在Carsim和Simulink两个仿真软件上搭建四辆车的CACC系统,并详细阐述其中的原理与方法。
CACC系统的搭建主要涉及到两个方面:间距策略和分层式控制。间距策略是指车队中各个车辆之间的距离如何根据领航车的速度进行调节。分层式控制是指CACC系统中的下层控制和上层控制两个层次。下层控制主要利用车辆逆纵向动力学模型,包括逆发动机模型,来对车辆的加速度进行控制。上层控制则采用模糊MPC(Model Predictive Control)算法,对相对距离、相对速度、加速度等进行调节。其中,模糊逻辑用于在线调整MPC的权重系数,而stateflow则用于实现模式的切换。通过这样的分层式控制,CACC系统可以实现定速巡航和车队跟随工况。
在搭建CACC系统的过程中,研究者们需要熟悉Carsim2016和Matlab2018b及以上的使用方法。Carsim是一款专业的车辆动力学仿真软件,Matlab则是一种强大的数学计算工具。通过这两个软件的结合,可以实现CACC系统的模拟和仿真。同时,为了更好地理解CACC技术,研究者们还可以参考详细的学习资料。这些资料涵盖了入门自适应巡航、协同式自适应巡航、自动驾驶纵向控制等方面的知识。此外,学习模型预测控制算法和模糊推理方法也是了解CACC技术的关键。
总之,CACC技术作为自动驾驶领域的重要研究方向,其在车队跟随和安全性方面的优势备受关注。本文围绕CACC系统的搭建和原理进行了详细的阐述,介绍了在Carsim和Simulink两个仿真软件上实现CACC的方法。此外,还提供了适合入门CACC技术的学习资料,包括自适应巡航、协同式自适应巡航、自动驾驶纵向控制以及模型预测控制算法和模糊推理方法等方面的内容。这些资源将有助于研究者深入理解CACC技术的原理和应用。
以上相关代码,程序地址:http://matup.cn/688633031253.html















 1169
1169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









