






 本文详细介绍了BLDC转速控制仿真,包括外环PI控制、内环电流滞环或bang-bang控制、霍尔传感器的应用以及六步换相法驱动。通过数学模型和仿真分析,研究者和工程师能深入了解和优化BLDC电机的性能。
本文详细介绍了BLDC转速控制仿真,包括外环PI控制、内环电流滞环或bang-bang控制、霍尔传感器的应用以及六步换相法驱动。通过数学模型和仿真分析,研究者和工程师能深入了解和优化BLDC电机的性能。
BLDC转速控制仿真,BLDC双环控制,无刷直流电机速度控制仿真。
外环转速PI控制,内环电流滞环控制或bang-bang控制,带霍尔传感器,采用六步换相法驱动。
只有仿真,没有代码。
ID:2724675793508700
UVWY仿真编程

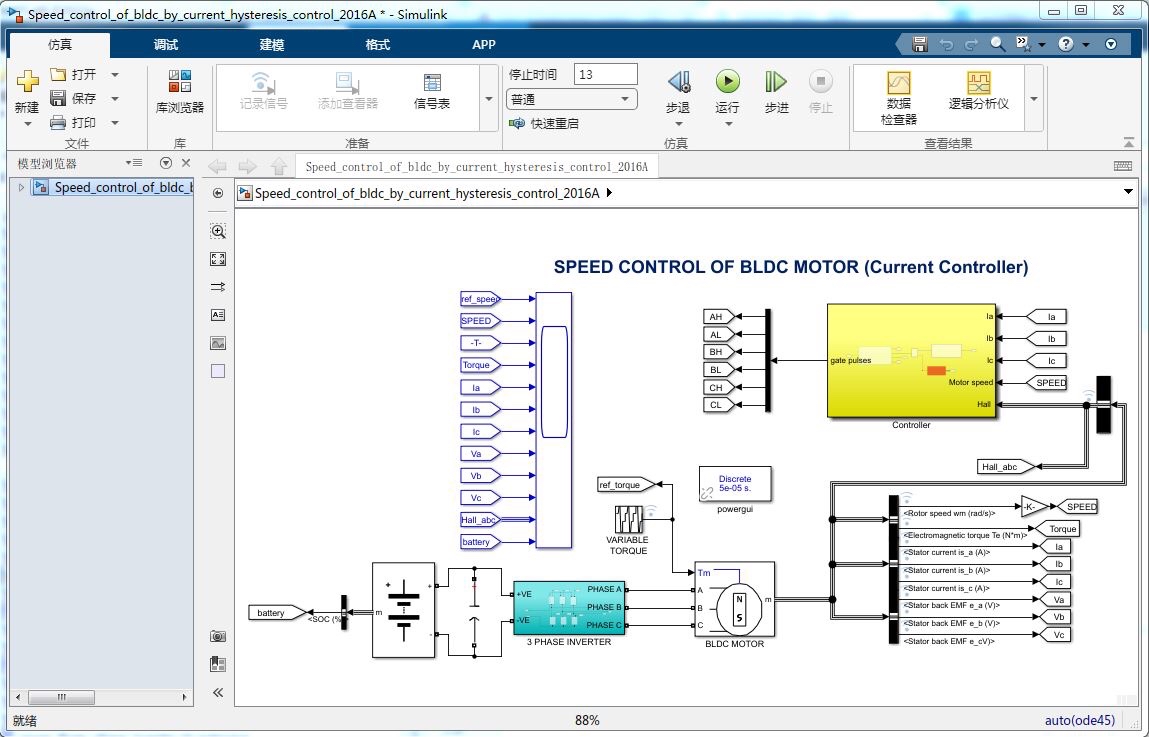
BLDC转速控制是一种常见且重要的技术,在无刷直流电机控制领域扮演着举足轻重的角色。本文将围绕着BLDC转速控制仿真展开讨论,重点探究BLDC双环控制和无刷直流电机速度控制的仿真方法。
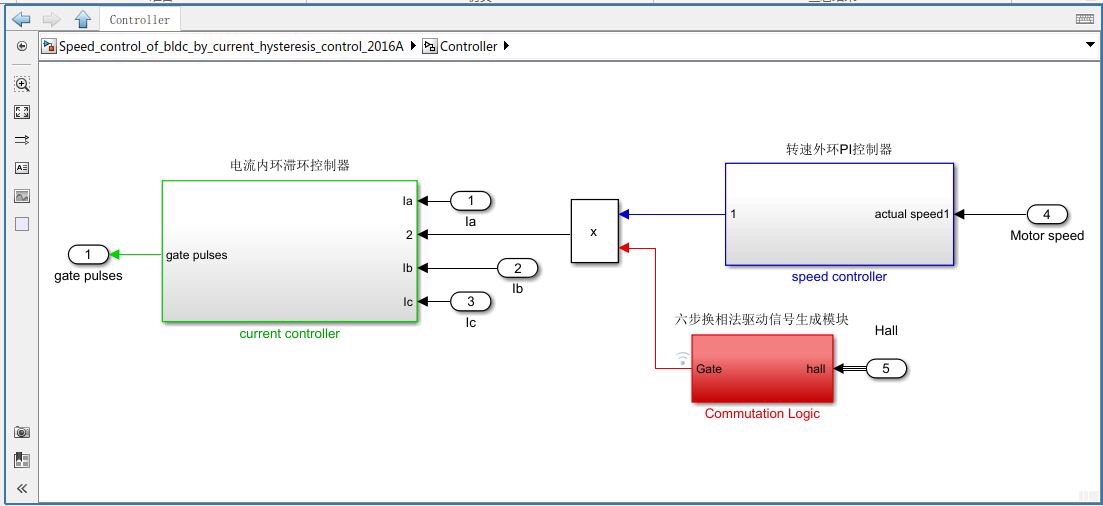
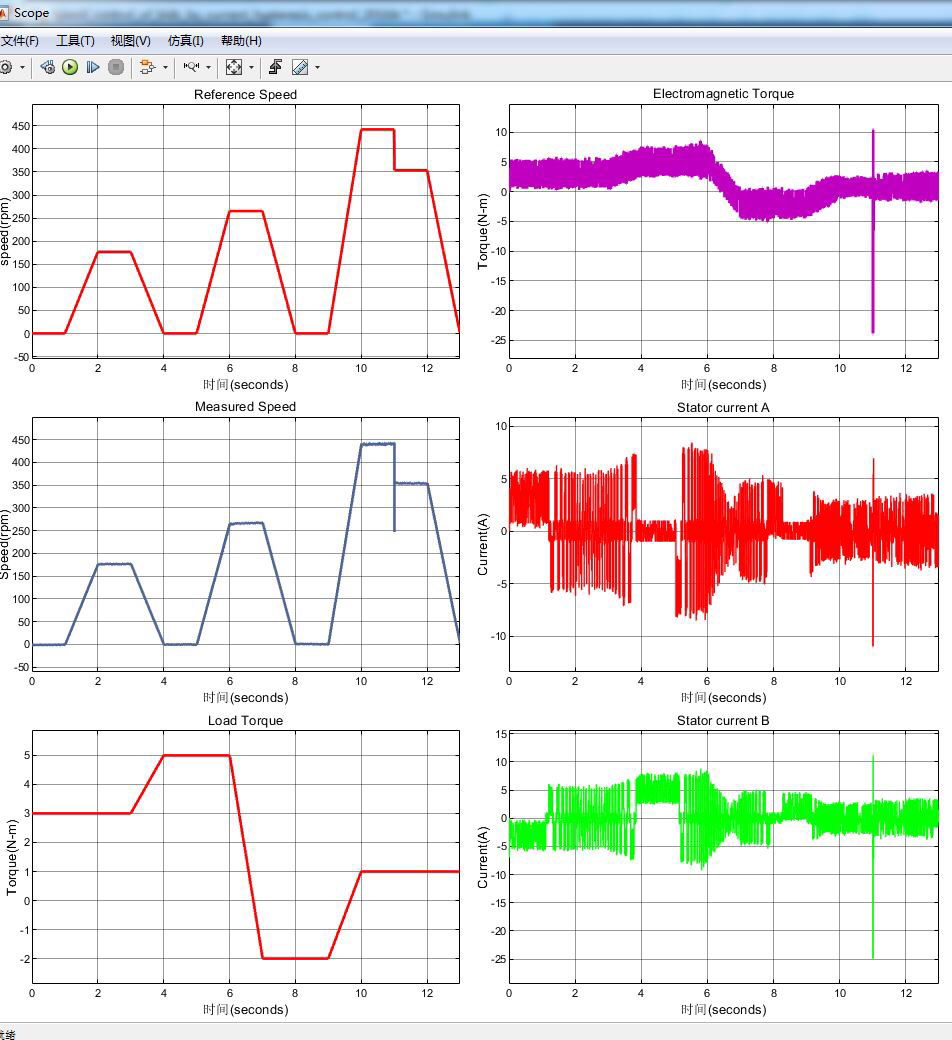
BLDC转速控制中,外环转速PI控制是常用的控制策略之一。通过测量电机转速并与设定值做差,利用PI控制器输出合适的电压或电流信号,从而实现对电机转速的精确控制。外环控制主要关注转速的稳定性和精度,通过调整PI控制器的参数,可以使电机转速快速响应和稳定运行。在仿真过程中,通过建立数学模型和仿真环境,可以模拟外环转速PI控制的效果,并对其性能进行评估。
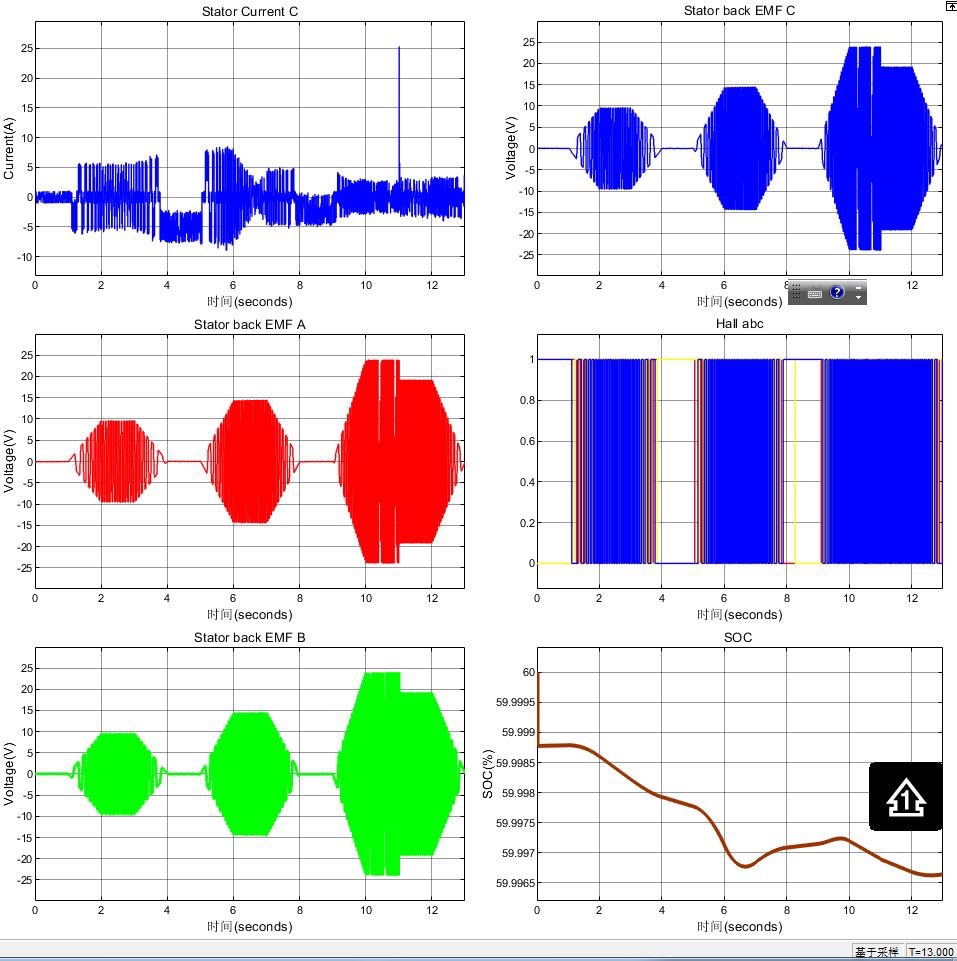
除了外环转速PI控制,BLDC转速控制中的另一个关键环节是内环电流控制。内环电流控制通常采用滞环控制或bang-bang控制策略。滞环控制通过设定合适的滞环宽度,使电流在一定范围内波动,从而实现对电机转速的控制。而bang-bang控制则通过开关电流的方式,使电流在设定值的上下波动,以达到控制转速的目的。在仿真中,可以通过建立电流环控制器的数学模型,并模拟出不同控制策略下电机转速的仿真结果,以便分析和评估不同的控制策略。
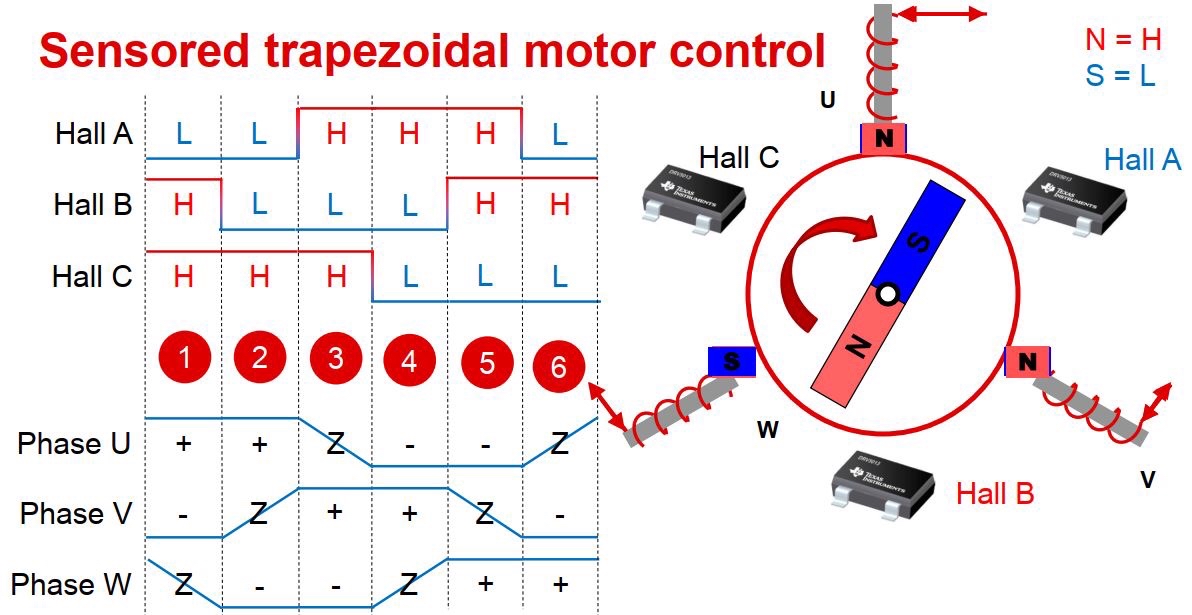
在BLDC转速控制中,霍尔传感器是常用的位置反馈传感器之一。通过采集电机转子位置信息,并将其反馈给控制器,可以实现对电机换相时机的准确控制,进而实现对转速的精确控制。在仿真中,可以考虑添加霍尔传感器模型,并将其与控制策略相结合,模拟出完整的BLDC转速控制仿真结果。
此外,BLDC转速控制中常采用六步换相法驱动电机。通过在不同的换相模式下切换电机相线的连接状态,可以实现电机的正常运转和控制。在仿真过程中,可以模拟出不同的换相模式下电机的运行情况,并观察其转速控制效果。
总结来说,BLDC转速控制仿真是一项具有挑战性且重要的技术研究。通过建立数学模型、选择合适的控制策略、添加合适的传感器模型,并模拟出不同情况下的仿真结果,可以深入理解和评估BLDC转速控制的性能。在实际工程中,可以根据仿真结果进行控制器参数调整和优化,以实现更加精确和稳定的BLDC转速控制。
在本文中,我们围绕BLDC转速控制仿真展开了讨论,并重点探究了BLDC双环控制和无刷直流电机速度控制的仿真方法。通过对外环转速PI控制、内环电流控制、霍尔传感器的模拟和六步换相法驱动的仿真分析,我们可以更好地理解和评估BLDC转速控制的性能。希望本文能够为技术研究者和工程师提供有益的参考和启发,从而促进BLDC转速控制技术的进一步发展和应用。
以上相关代码,程序地址:http://coupd.cn/675793508700.html















 355
355











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









