







移动机器人运动规划 作业问题
HW1
问题1: 在运行功能包时出现问题:参考
/usr/include/pcl-1.10/pcl/point_types.h:550:1: error: ‘plus’ is not a member of ‘pcl::traits’
解决:在路径home/whj/catkin_ws/src/grid_path_searcher下修改CmakeList.txt 文件,在第14行之后添加
set(CMAKE_CXX_STANDARD 14)
再次运行即可
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
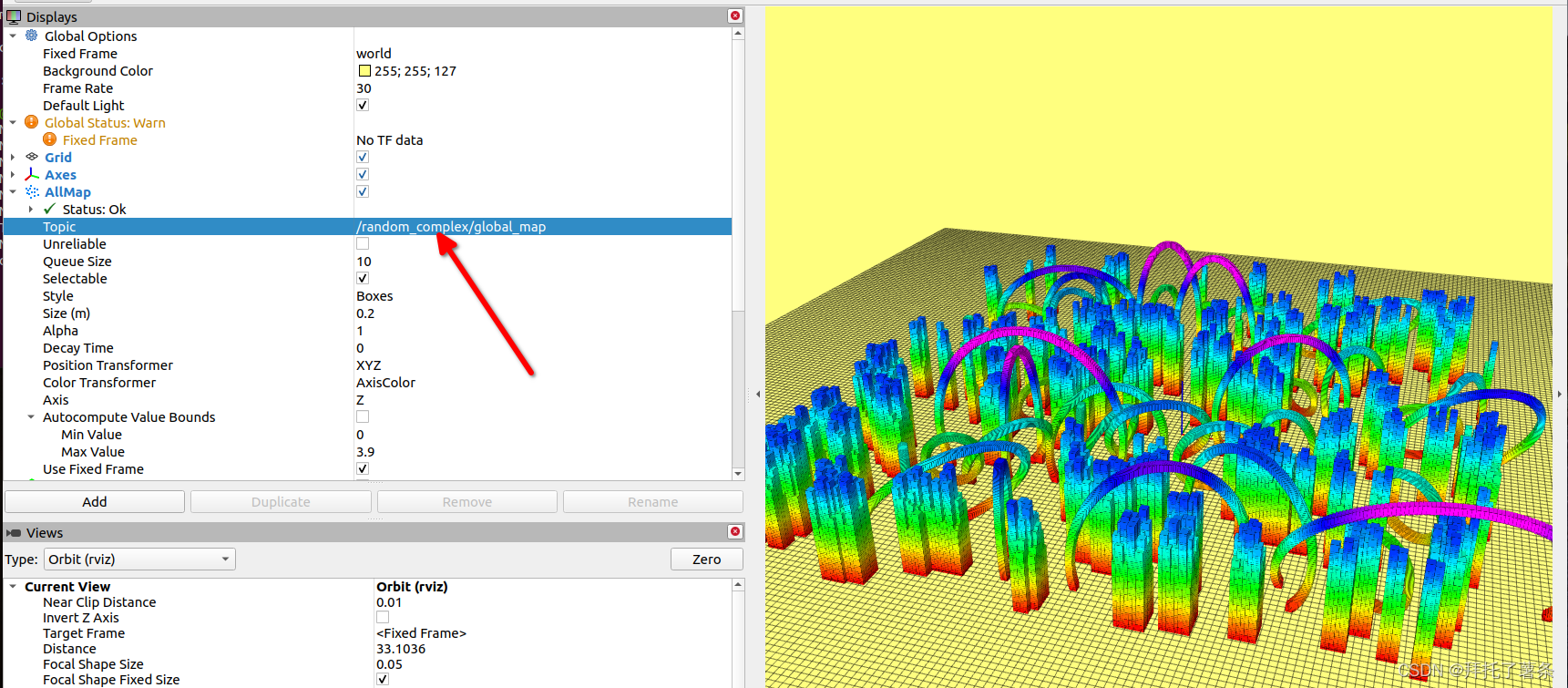
问题2:运行demo.launch文件未显示地图,是订阅的topic 不正确
解决:AllMap->Topic选择/random_complex/global_map














 1007
1007











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









