







KINODYNAMIC PATH FINDING
前言:博客介绍非常简单,具体的 请参考课程。
1.Introduction
概念:
- 解决动力学约束(如避障)和 dynamic constraints (如 速度、加速度、力的限制)
- solution 是从时间映射到 力和加速度
作用:虽然有后期规划,但是如果前期考虑了运动学约束,就会为后期优化带来便利。
2.State Lattice Planning
2.1基础的理念
- 已经有很多方法用于图搜索,现在重点就是如何产生图
- 要求生成可行的运动连接:
- 正向:离散控制空间,比如栅格地图的四连接,八连接
- 反向:离散采样空间,比如RRT,空间随机采样
- State Lattice Planning 就是最直接的一种
2.2如何生成图:
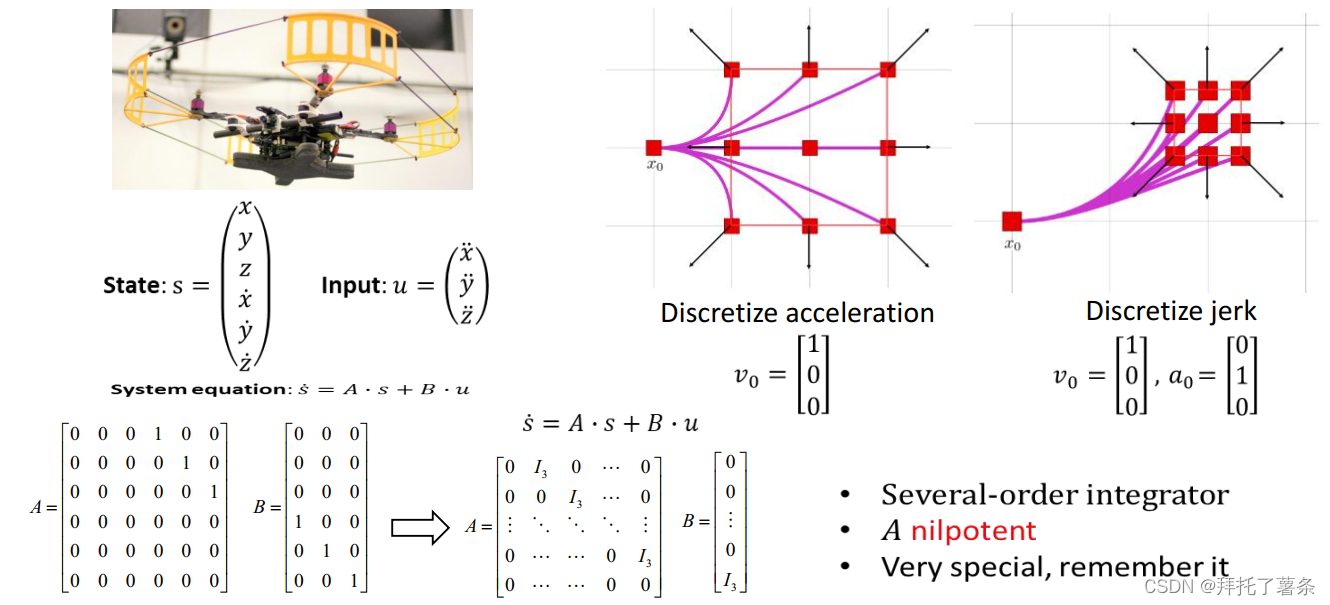
2.2.1 离散控制空间
- 离散控制空间:挑选不同的控制 u ,固定时间 T ,前向仿真整个系统;
- 没有目标倾向
- 容易实现,但是效率低。
- 会产生很多无用的路径(目标点不在状态空间里)
- 容易依赖初始状态,产生聚类现象,同时很多路径失败
-如下图:离散了加速度和加加速度,直接利用状态转移方程就可以求解。
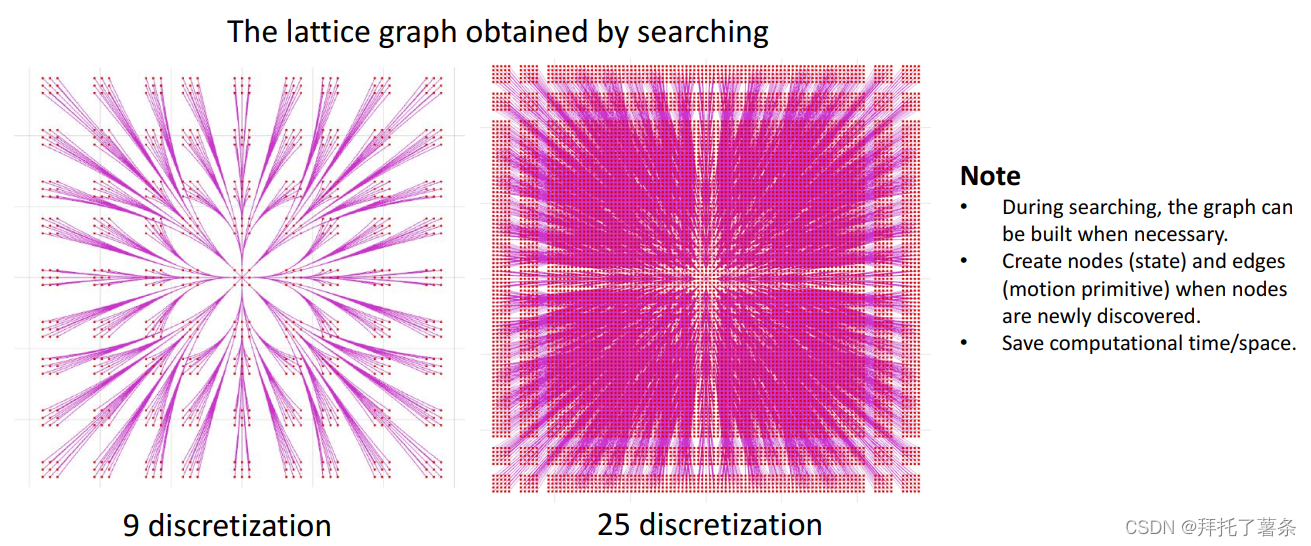
2.2.2 离散状态空间
- 离散状态空间:挑选终点s_f,反向找到起点和终点的连接
- 有目标倾向
- 较难实现,但是效率高,BVP 或OBVP
- 空间内均匀离散点,得到lattice graph
2.3 Boundary Value Problem(BVP)
BVP:知道初值和终值,比如位置和速度,计算中间路径
- 没有一般的解法,要根据实际案例设计
- 通常是结合一些数值解法
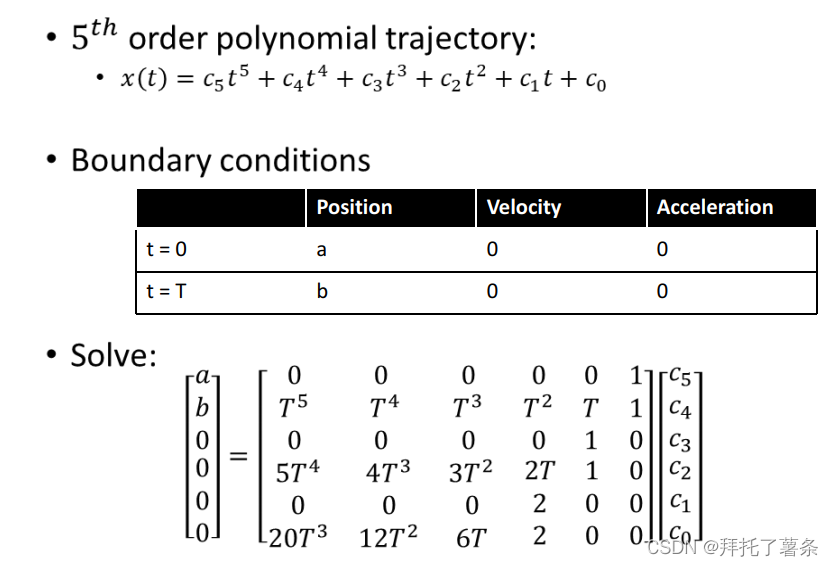
通过起点和终点的信息进行参数选择,但是可能存在很多解,并不是最优的。
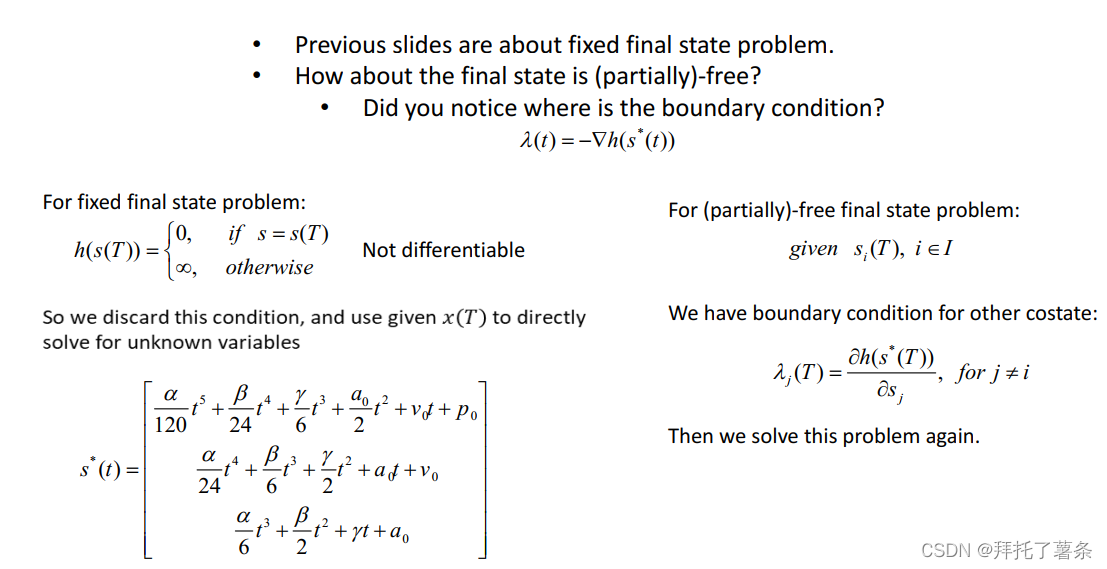
2.4 Optimal Boundary Value Problem(OBVP)
通过庞特里亚金最小值原理进行优化,得到一个最优的解答(T固定),以及得到最优的时间T。
应用:无人机接求、打羽毛球等等
- 建模、庞特里亚金最小值原理求解,参考论文2:
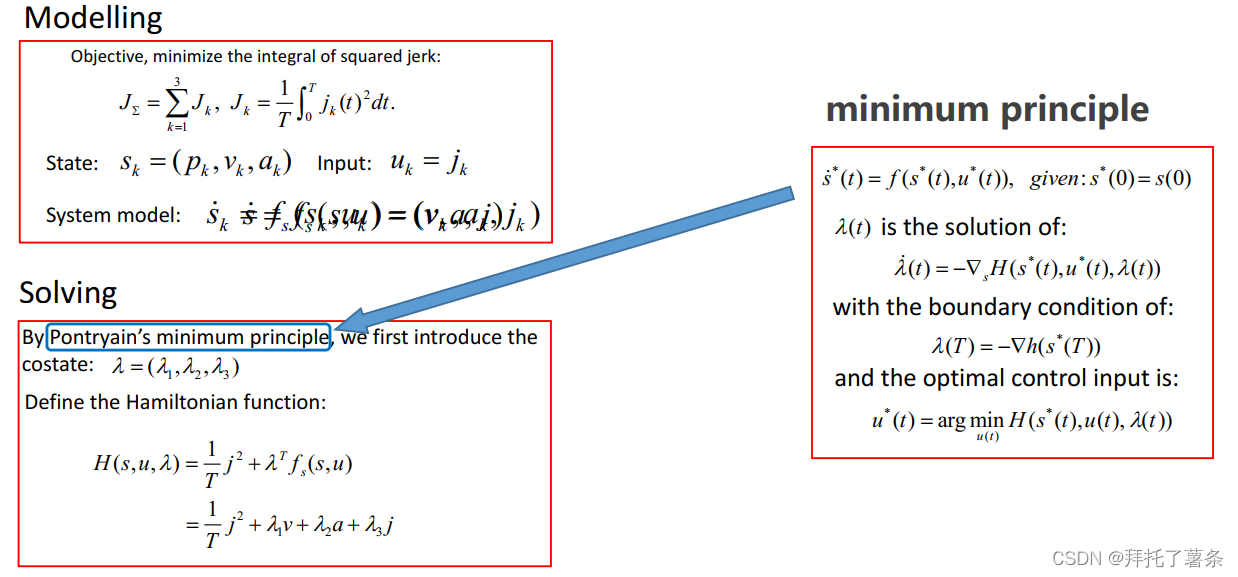
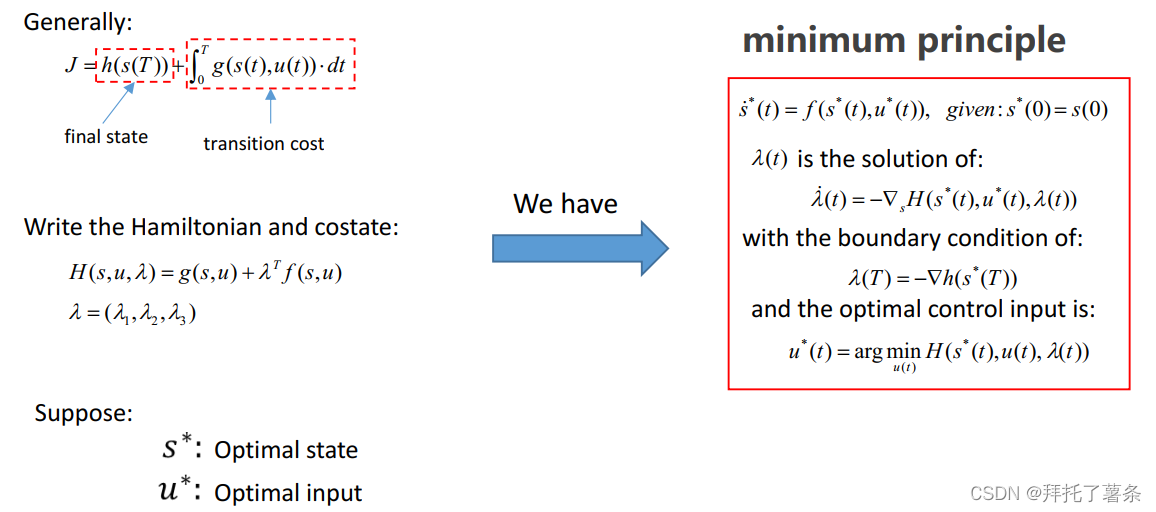
- 庞特里亚金最小值原理的应用:
- 得到要优化的项:final state and transition cost
- 写出哈密尔顿函数和costate
- 得到具体的哈密尔顿函数和costate的表达式
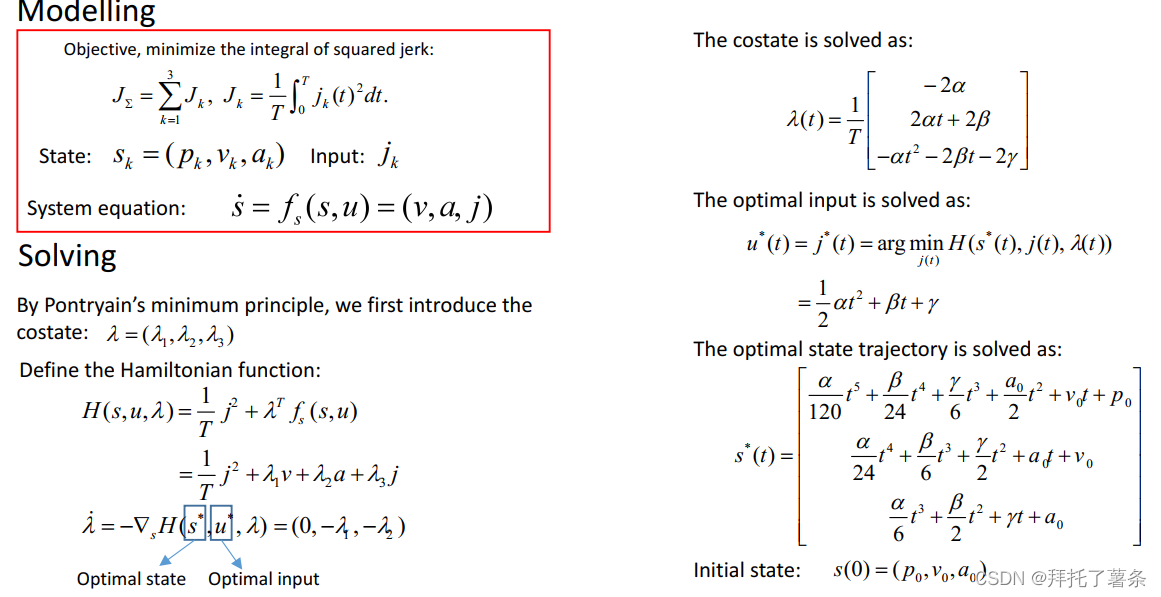
- 代入初值,得到最优解,并且可以计算最优的时间T
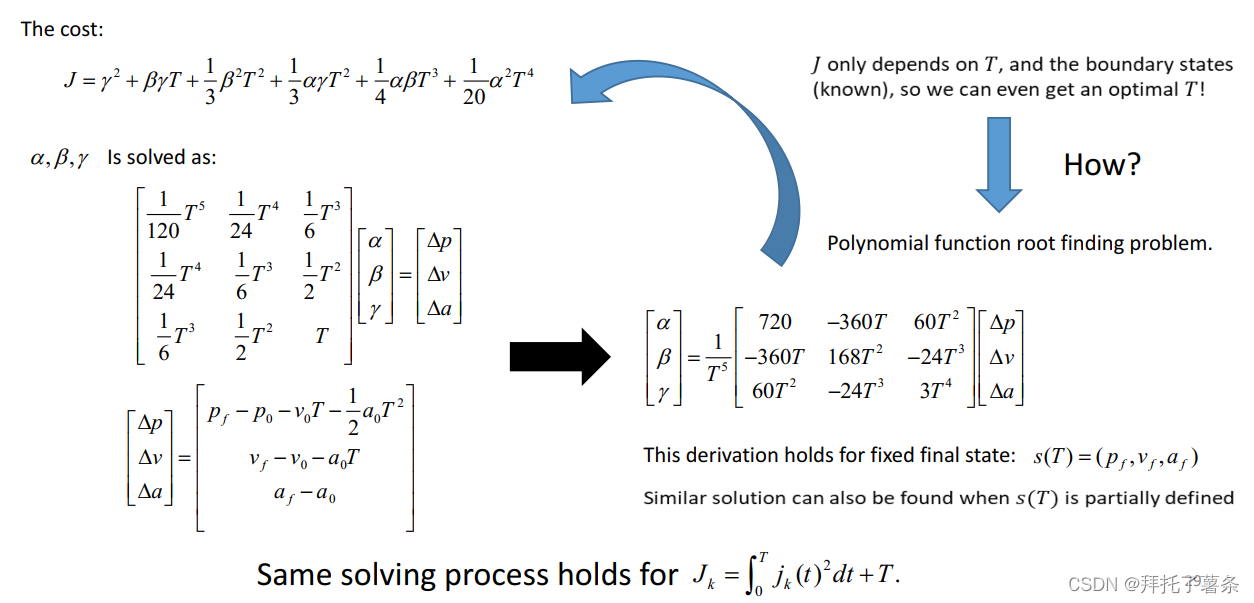
- 若只是部分状态固定,比如位置,但是其他的状态(速度)是不确定的 OBVP 问题
3.Hybird A*
将 lattice 和A*算法混合起来规划路径;
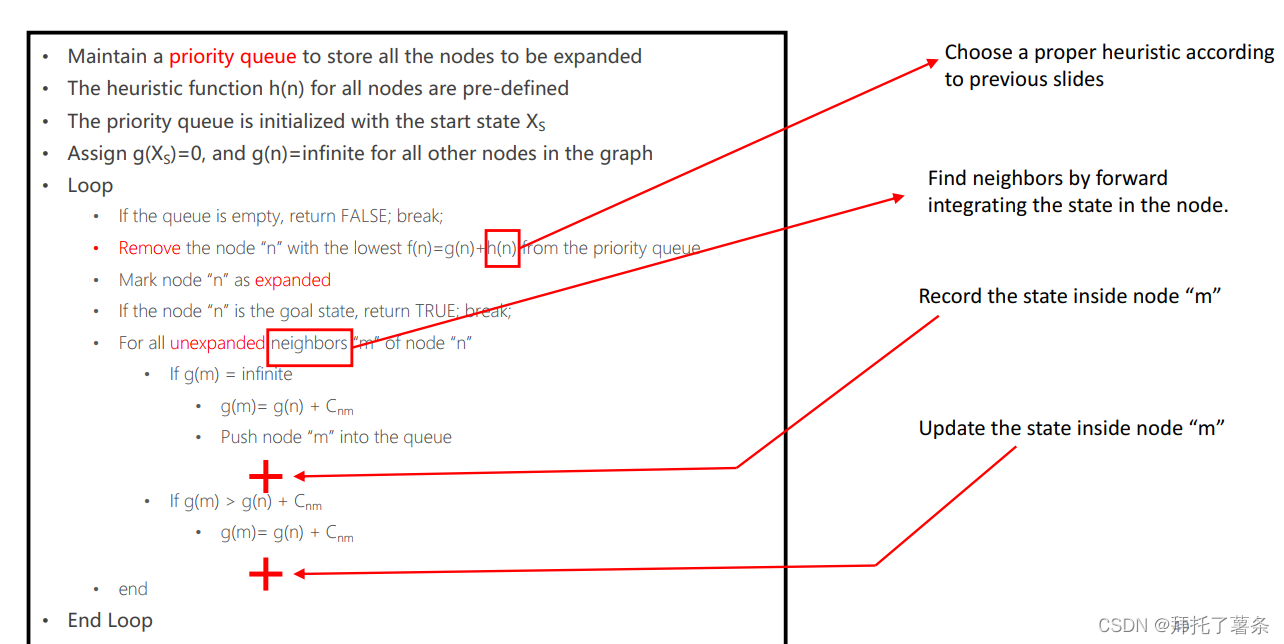
- 启发式函数设计
- 不考虑障碍
- 不考虑动力学约束
4.Kinodynamic RRT*
在 RRT* 的基础上结合动力学约束进行路径规划,具体参考课程
- 如何采样:在状态空间进行采样
- 如何定义near:通过obvp 计算 cost function
- 如何选择父节点
- 如何发现 near nodes
- 如何重连接
参考
- 1.深蓝学院:移动机器人运动规划课程,具体内容请看课程,若内容侵权联系删除。
- 2.A Computationally Efficient Motion Primitive for Quadrocopter Trajectory Generation, Mark W. Mueller, Markus Hehn, and Raffaello D’Andrea Dynamic Programming and Optimal Control, D. P. Bertsekas














 3397
3397











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









