







模型预测控制轨迹生成
前言:博客介绍非常简单,具体的 请参考课程。
1.Introduction
- 有系统模型和问题模型
- 预测:状态空间、控制空间、参数空间
- 控制:选择最优
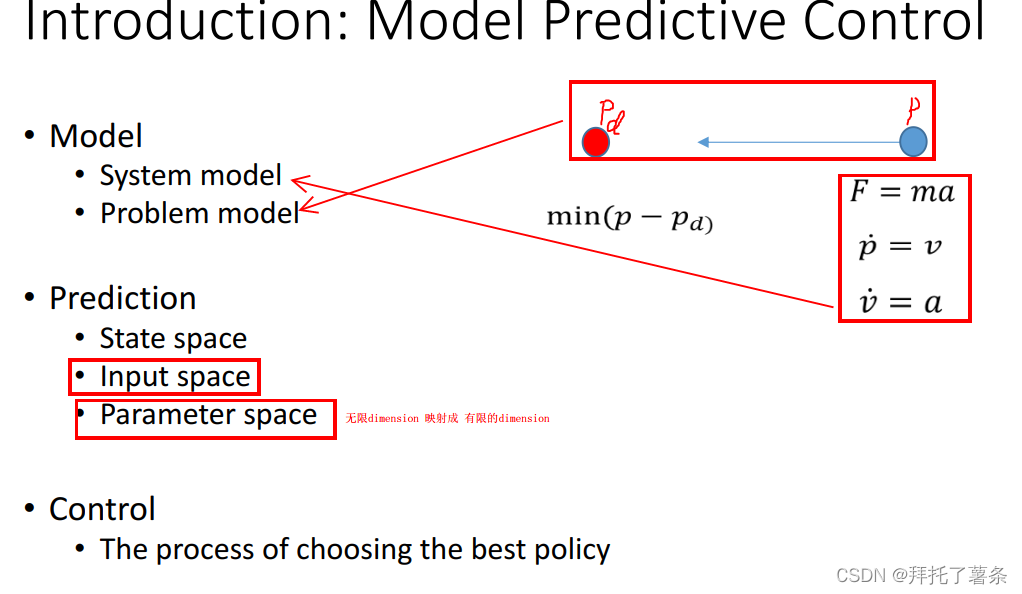
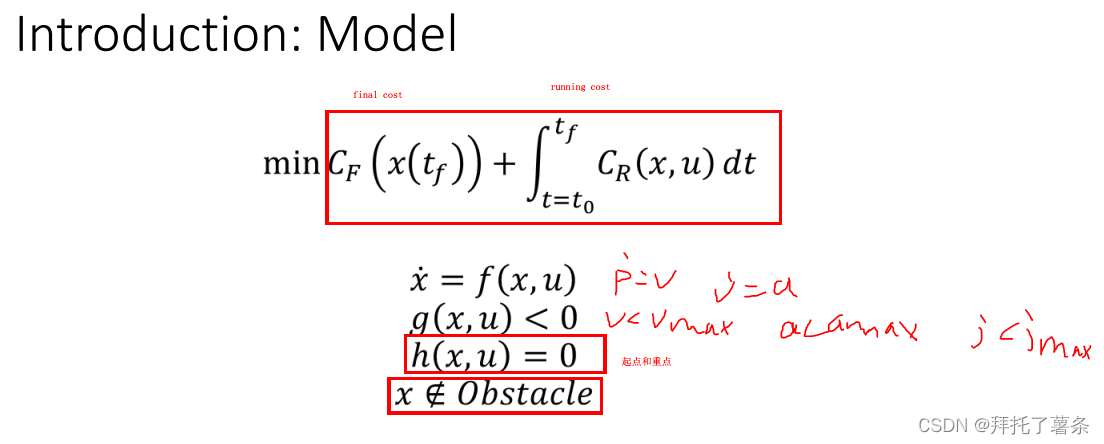
- 问题约束
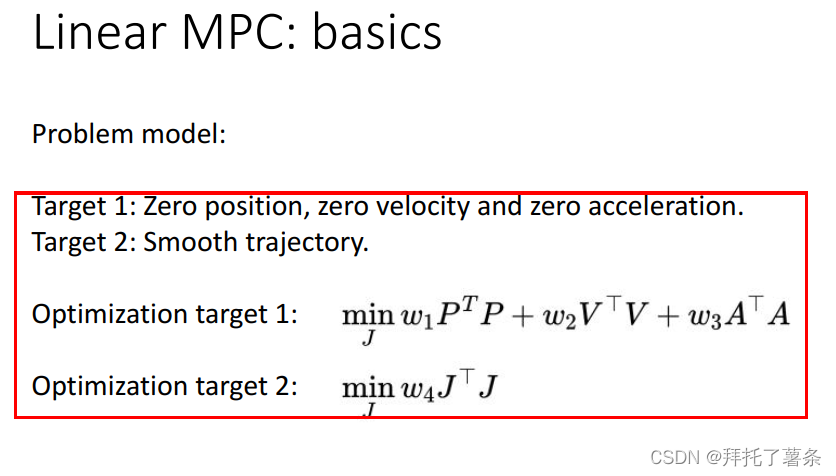
2. MPC
三阶系统,连续模型到离散模型
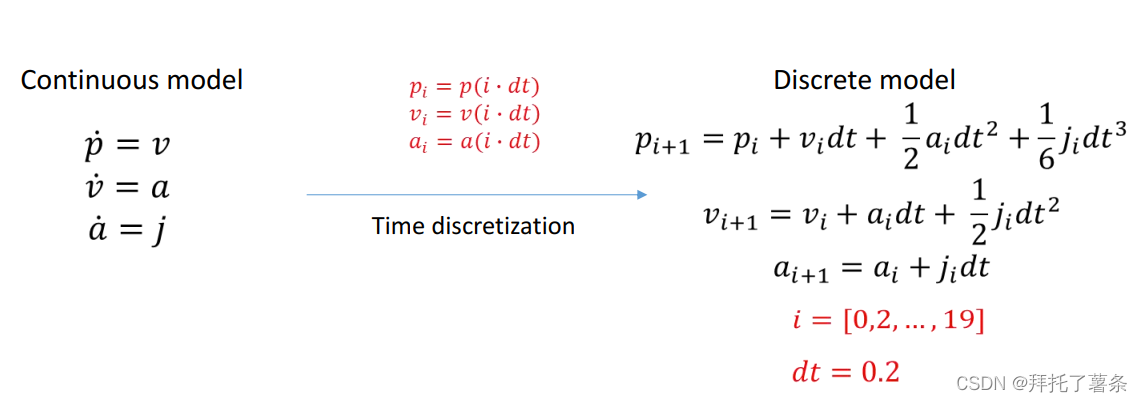
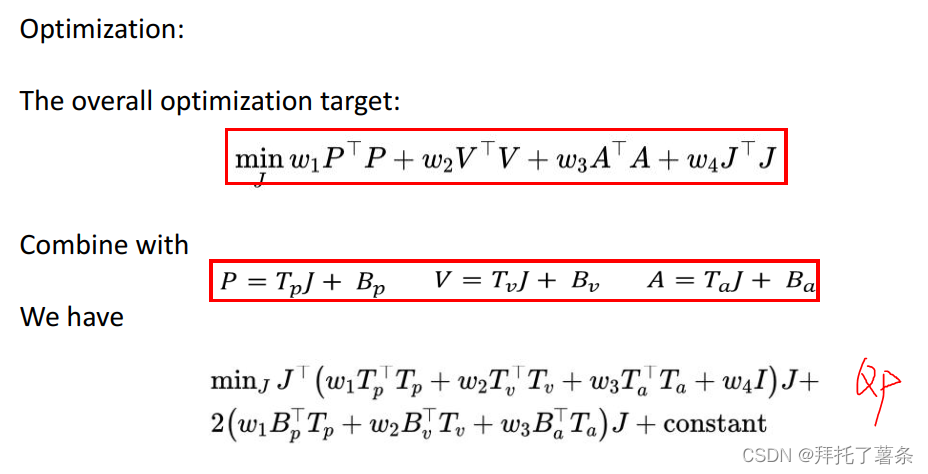
映射关系
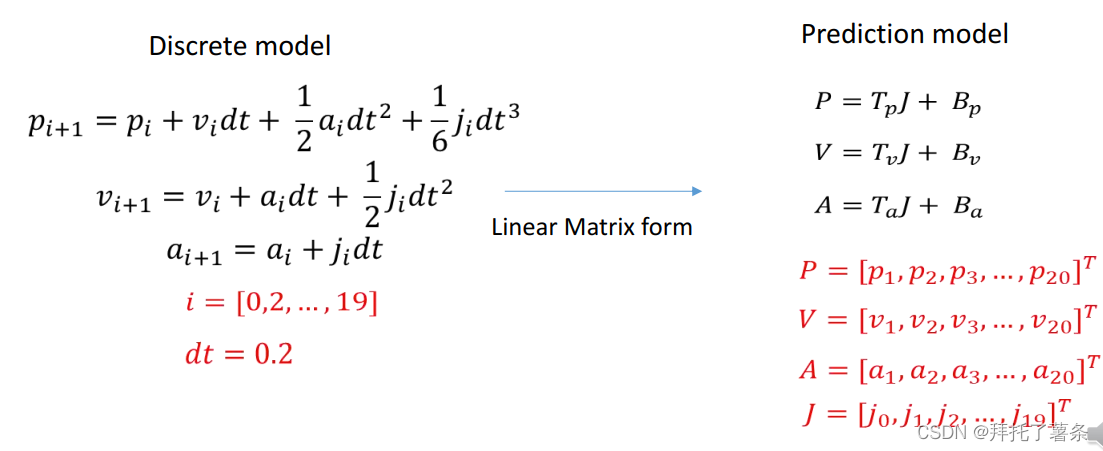
- 转化为QP问题求解
-
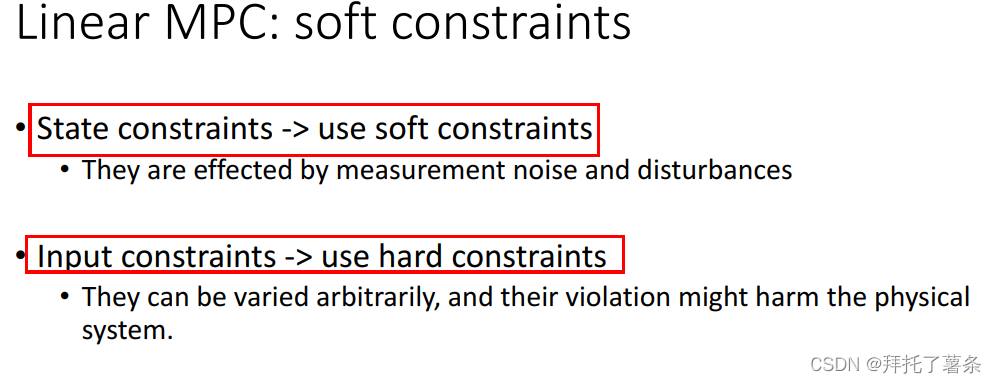
- 硬约束条件
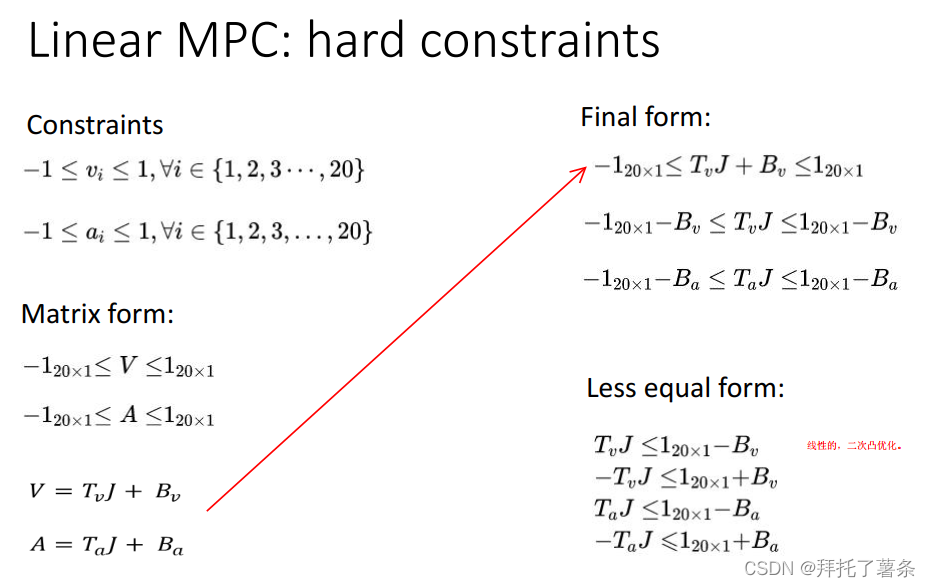
- 如果开始不满足硬约束条件,就不能求解,转换为软约束
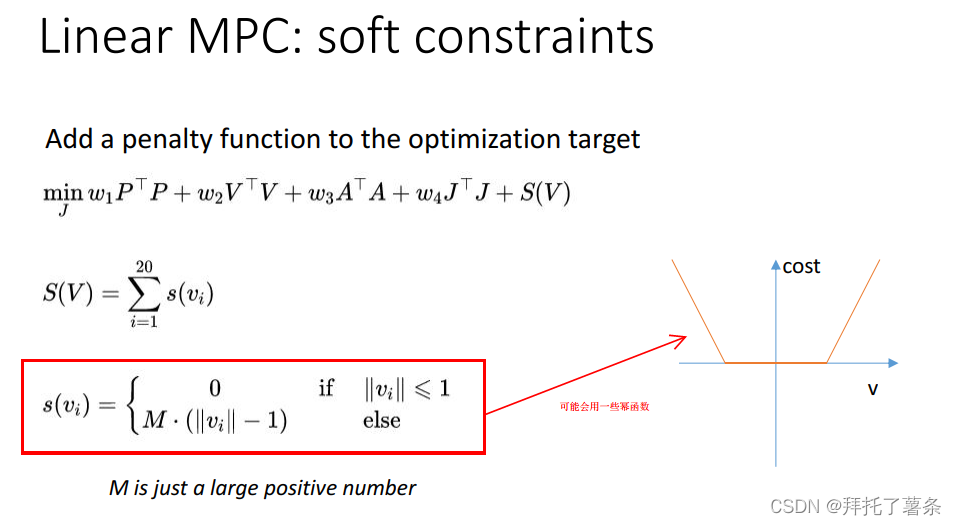
- 如何选择软硬约束
- 参数空间:BSCP Boundary constrained motion primitives
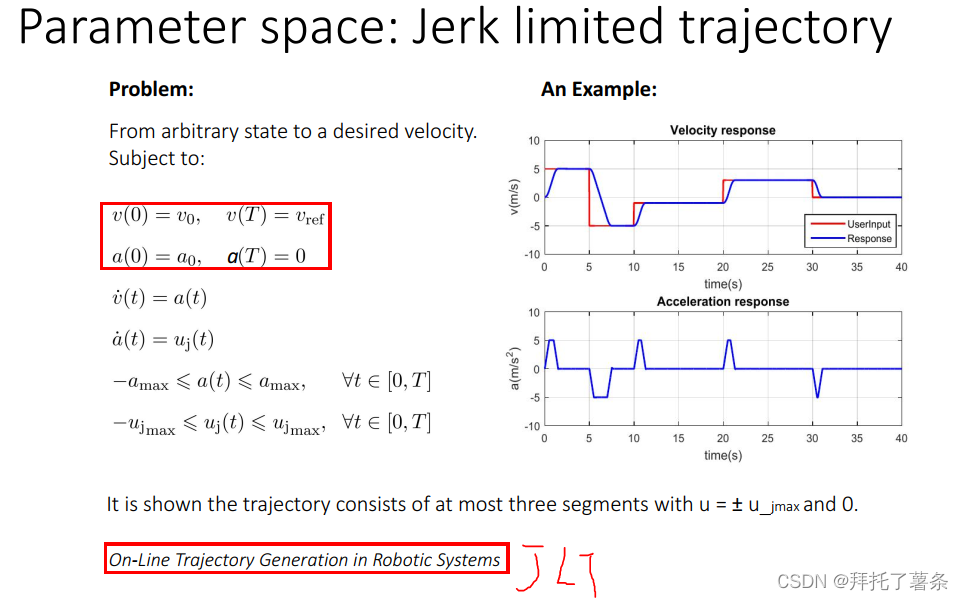
其中一种就是转换为 BVP 问题求解,具体看课程和ppt
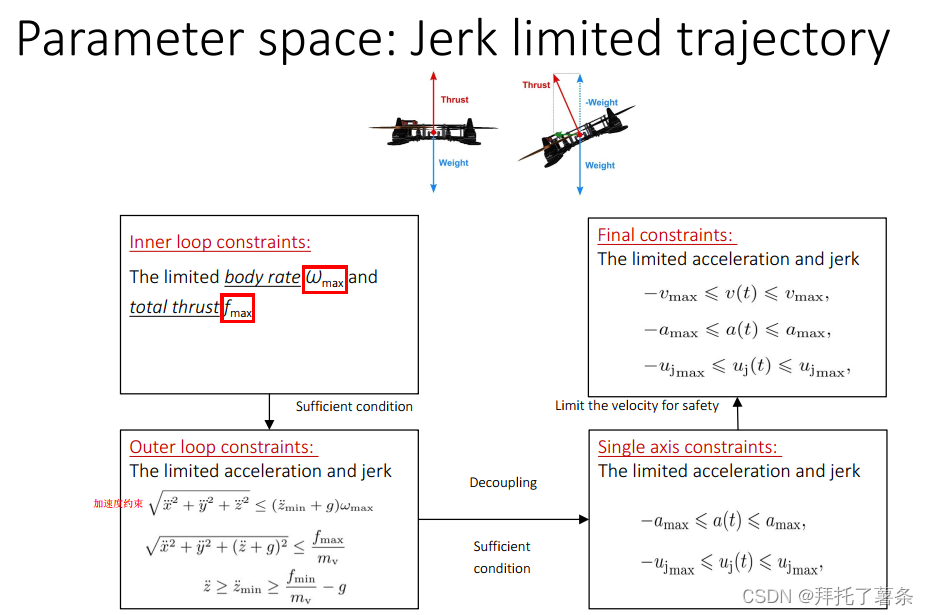
课程中的案例,具体参考课程。JLT 问题可以在很小的设备上实现
3.Non-linear MPC
暂时短时间内不了解,后面有时间深入研究。














 1590
1590











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









