







方向导数与梯度
问题引入
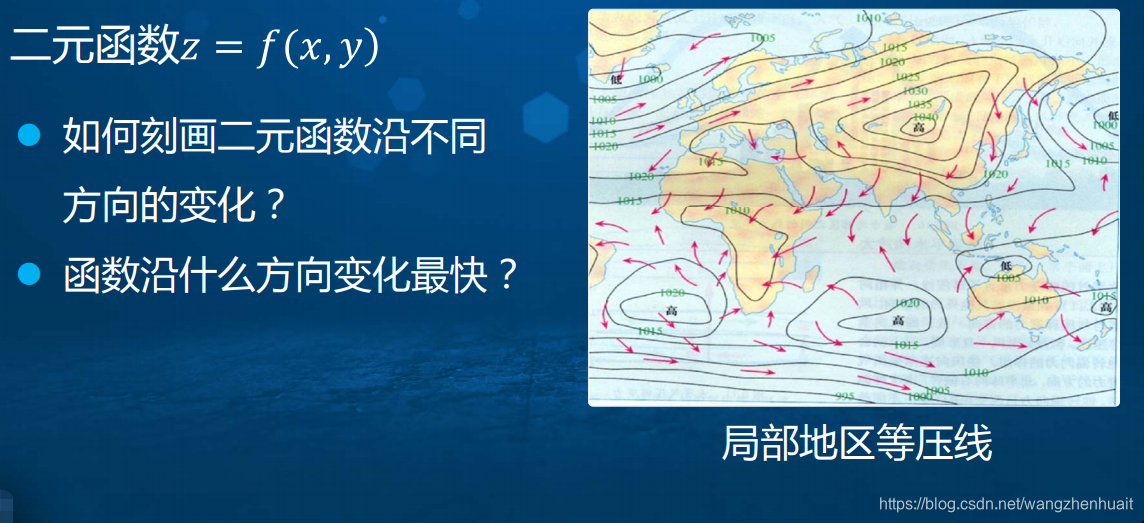
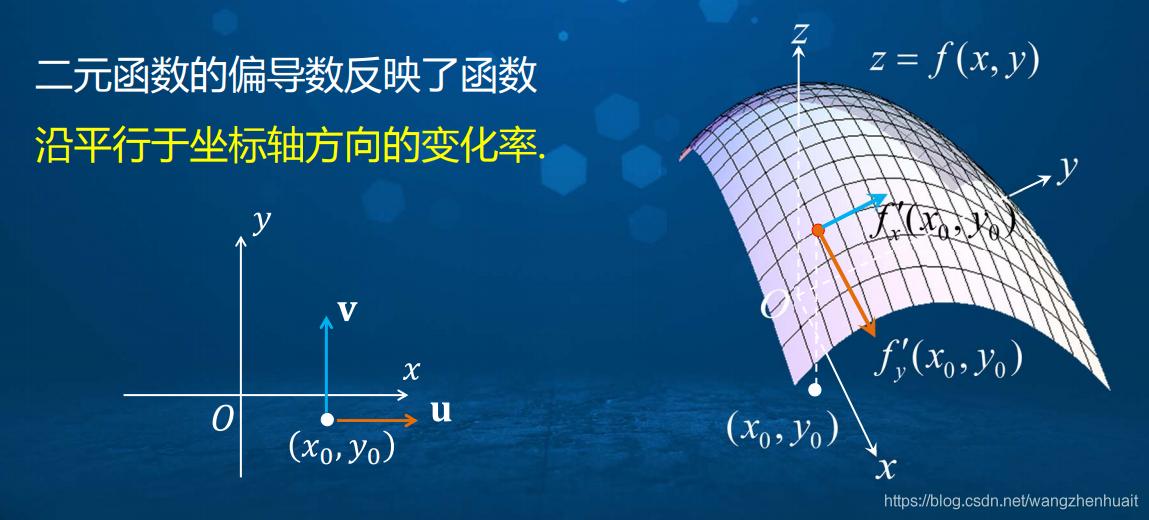
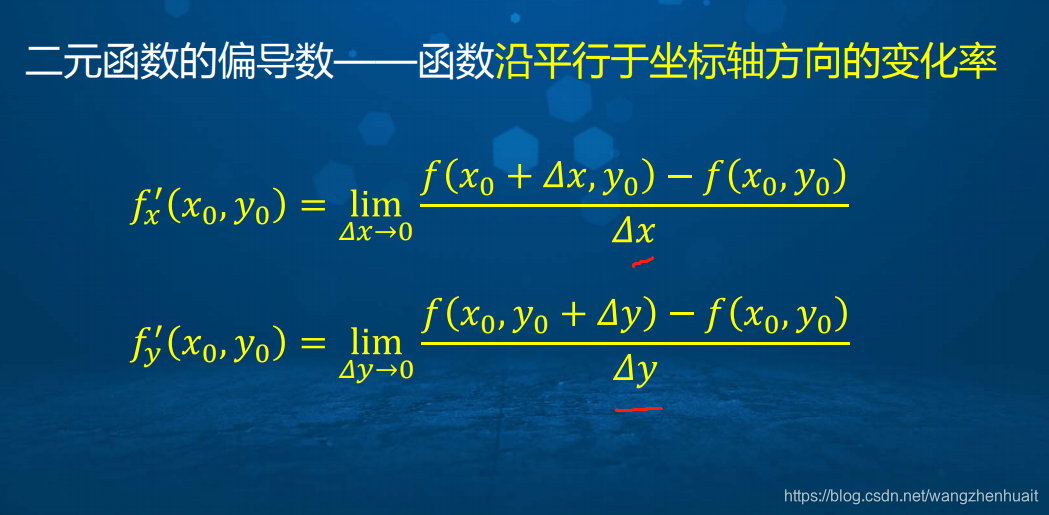
偏导数是研究函数 沿坐标轴平行 方向的变化率(切线)
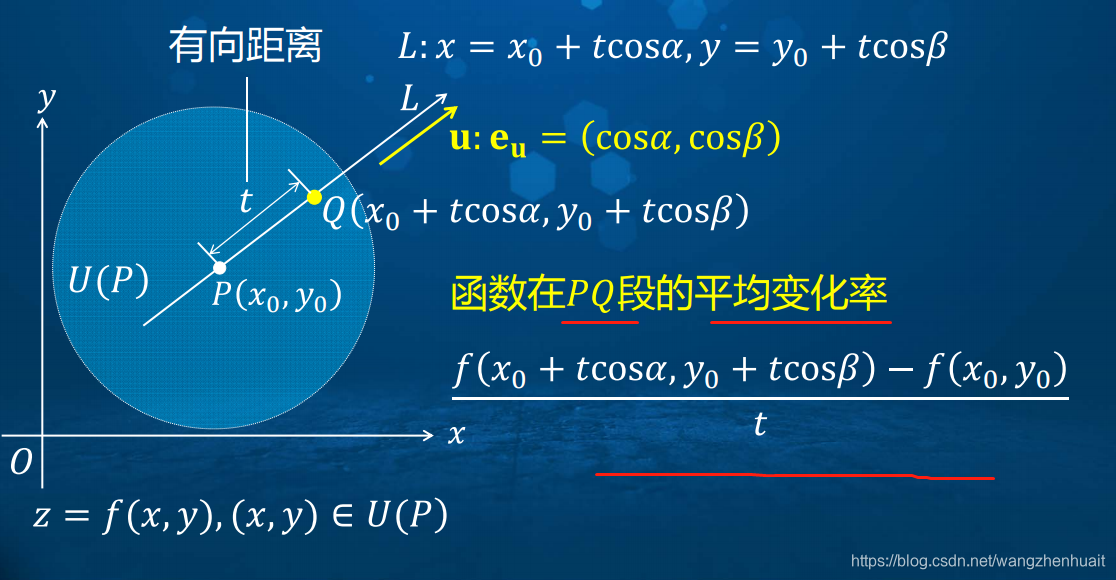
全微分是研究函数 沿任意方向的增量
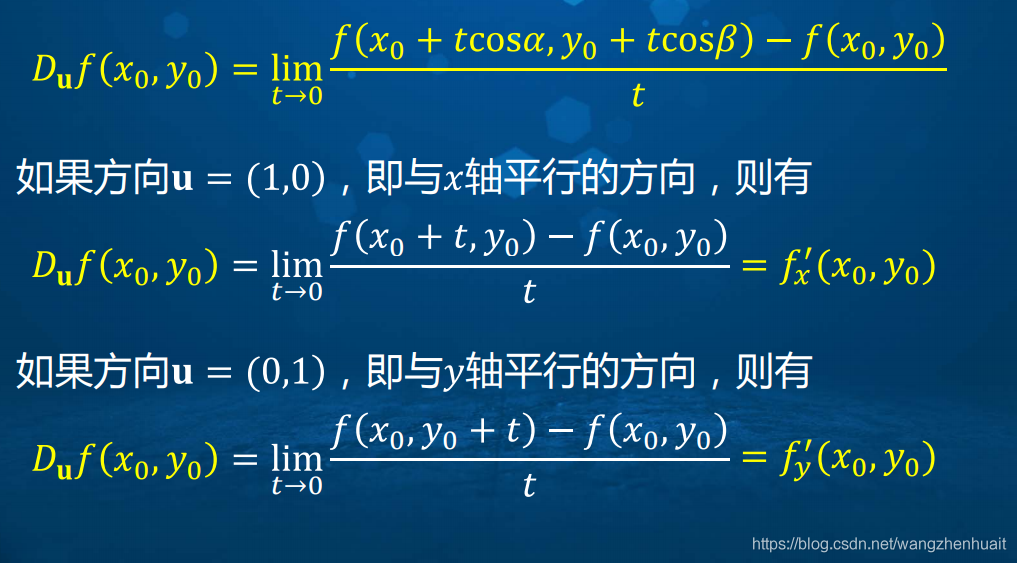
方向导数的概念
这个偏导数fx’应该是平行于x轴,fy’是平行于y轴图反了。
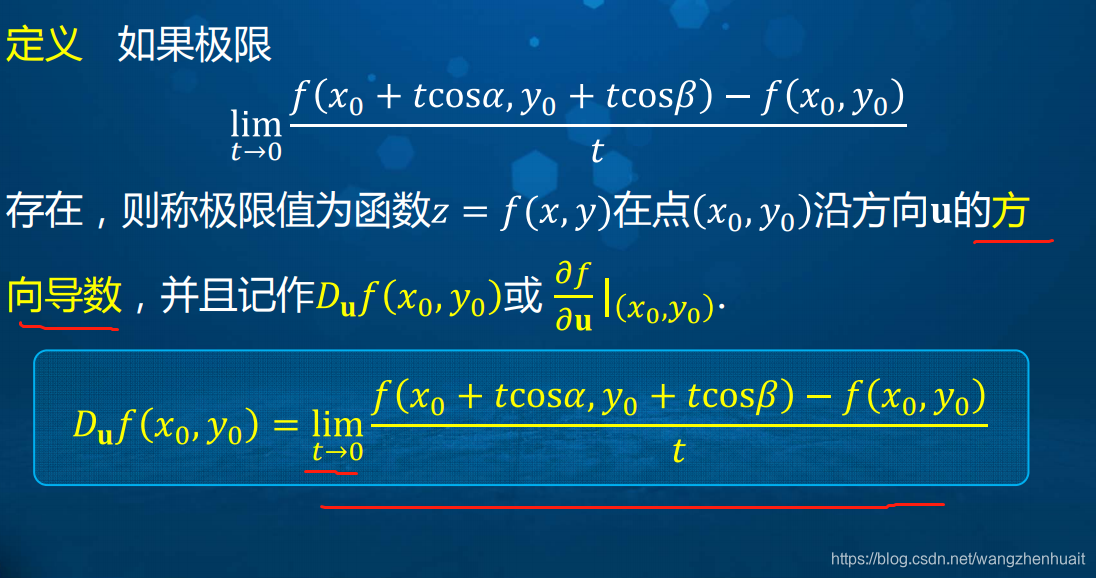
方向导数的定义
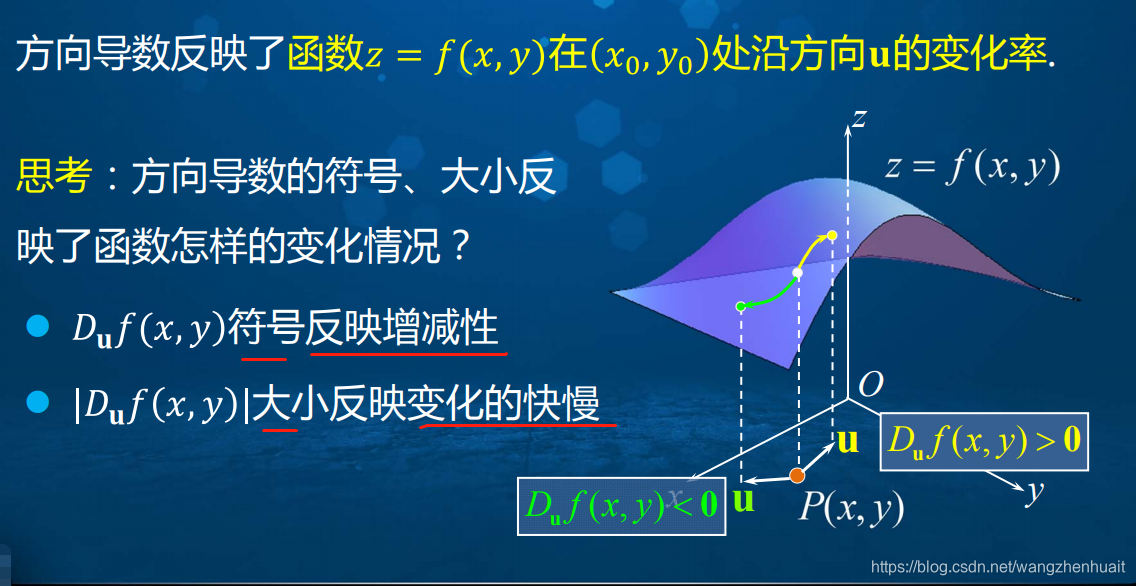
一元函数导数的符号(正负号)反映了函数的增减性,导数值的大小是刻画了函数变化的快慢程度
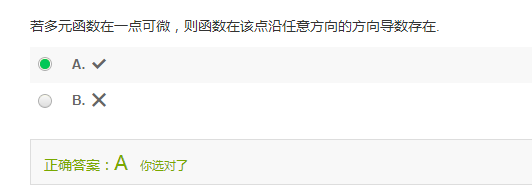
偏导数与方向导数的关系
方向导数的几何意义
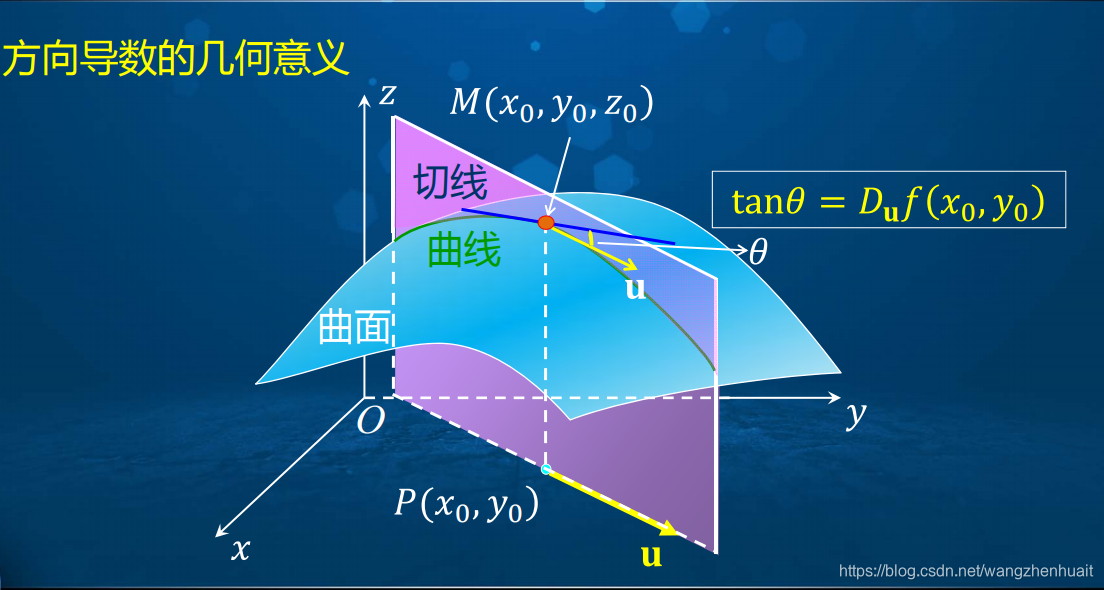
方向导数也是斜率
方向导数的计算(可微)
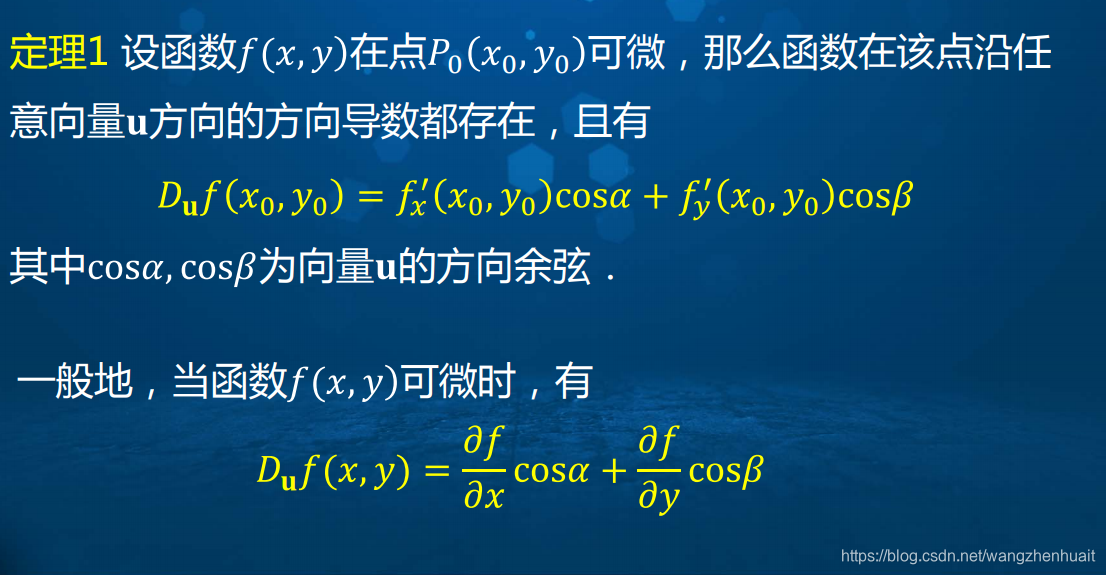
定理1(二元函数的方向导数)
二元函数已经是建立在三维里了,三元函数是建立在四维。
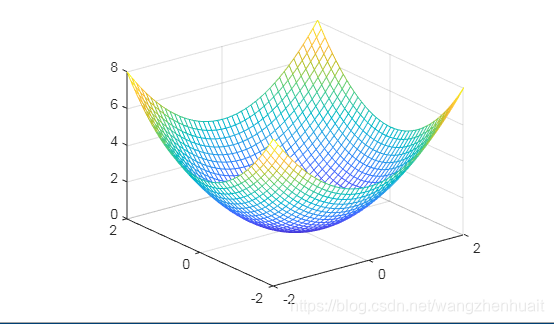
例如 :f(x,y)=z=x^2 + y^2 是抛物面,如图:
三原函数:U=X^2 + Y^2 + Z^2; 在三维坐标里画不出来。
定理1也是公式
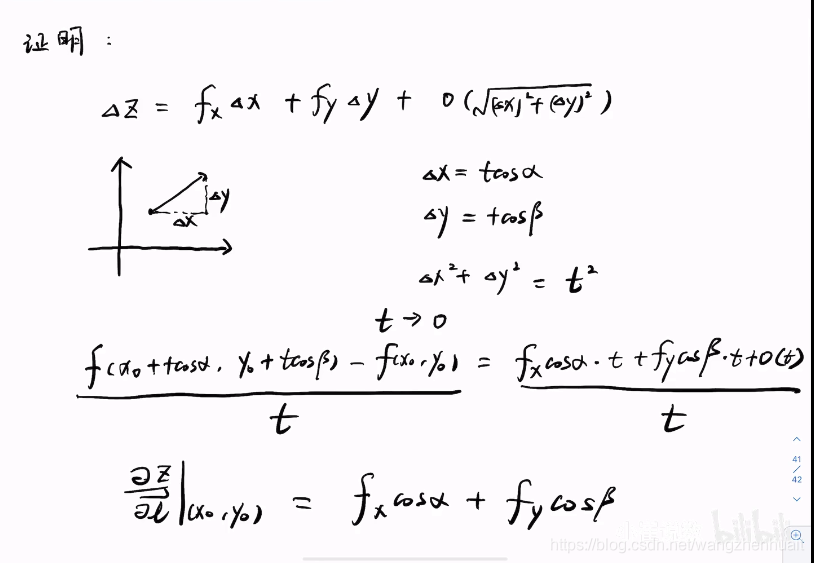
证明
例
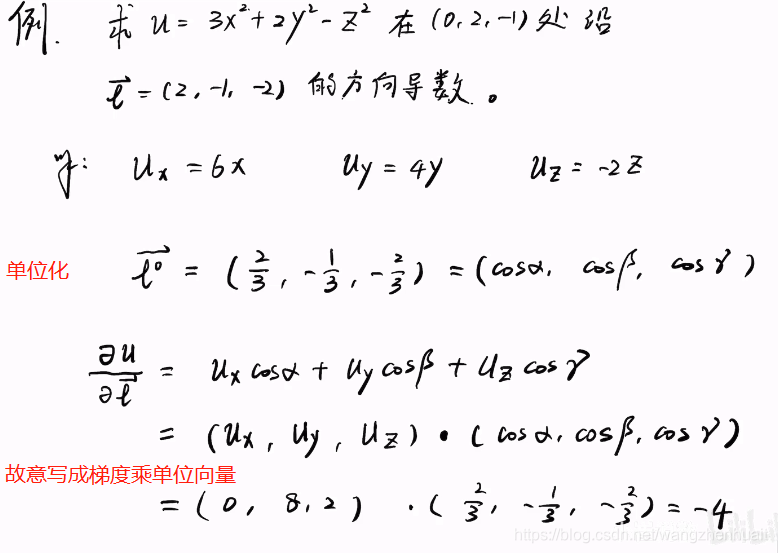
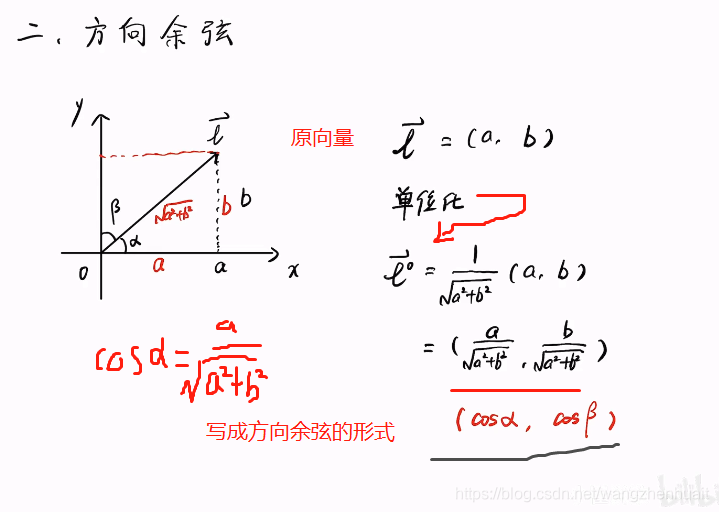
向量单位化
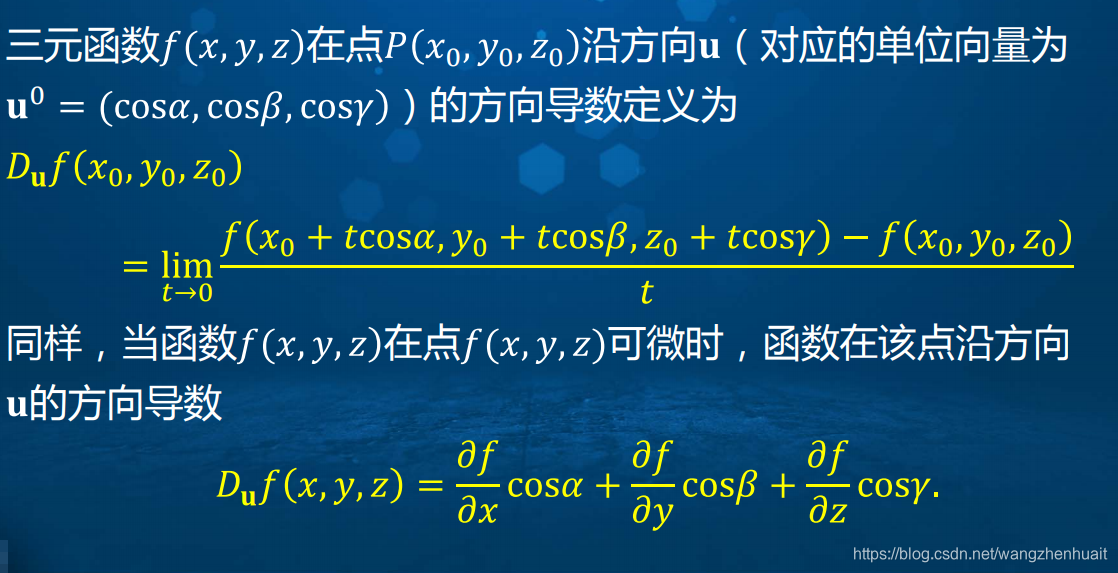
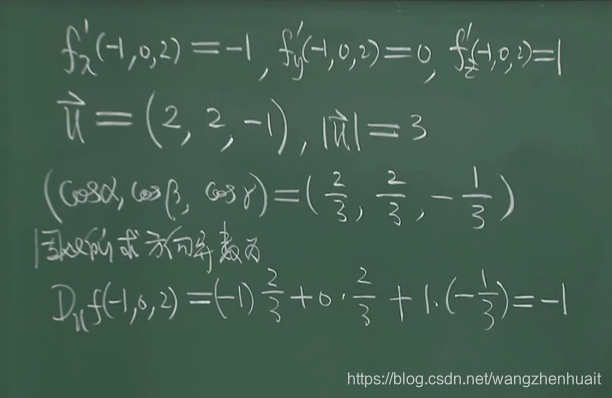
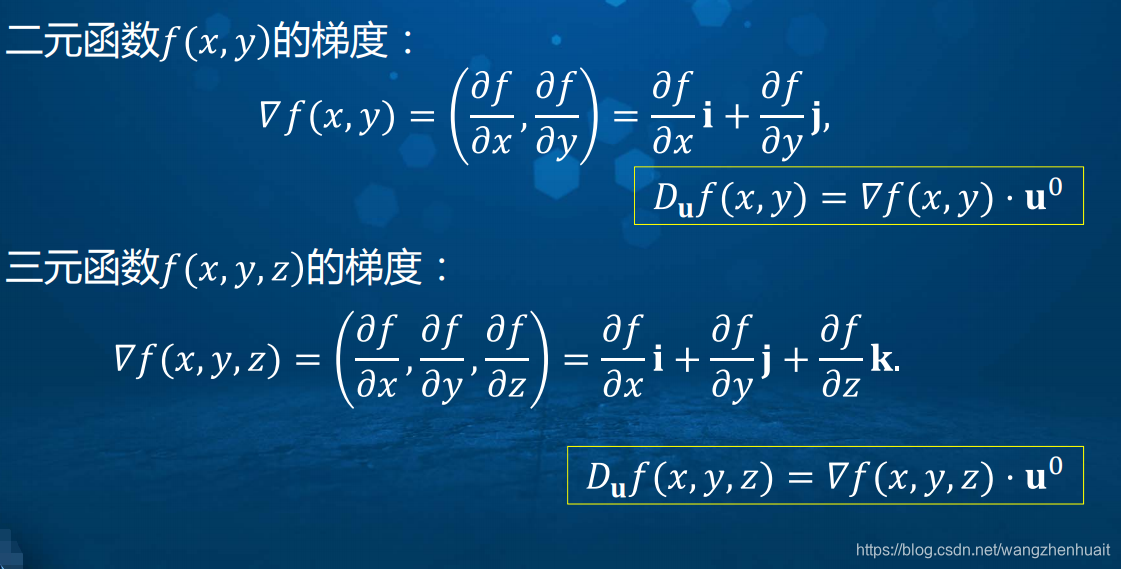
三元函数的方向导数
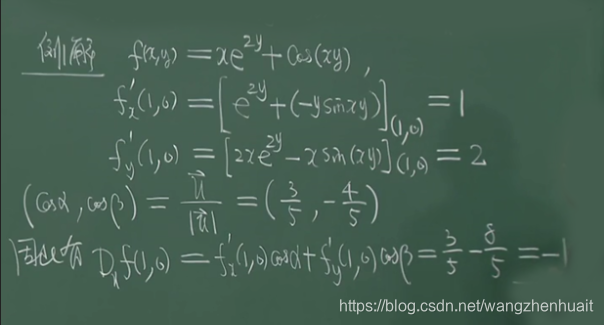
例1 (可微)

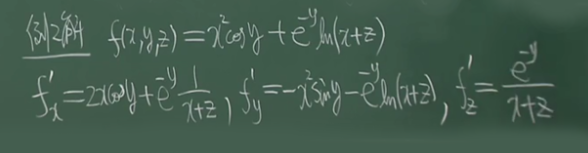
例2 (可微)

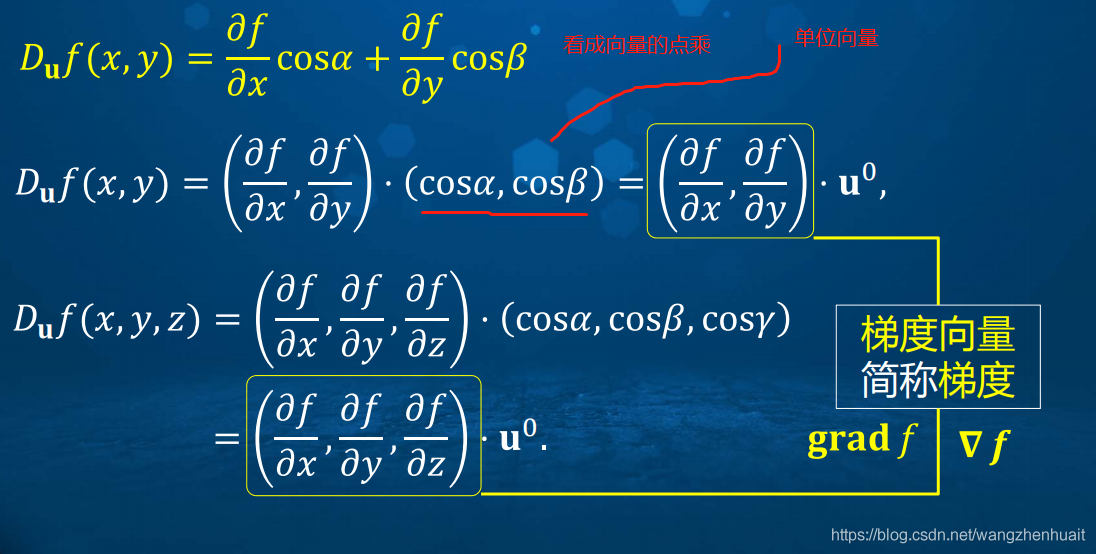
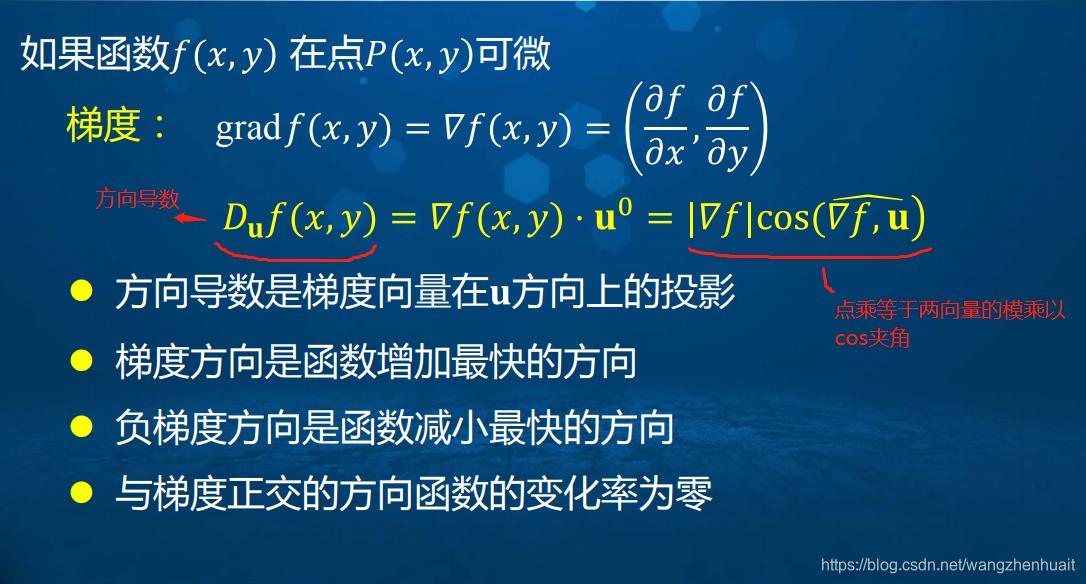
梯度及其几何意义
梯度向量就是偏导数向量
下面是一种几何意义的想法,在三维坐标下,想象 action :
函数f(x,y), y固定在h, 沿x轴变化率看成一个向量,这个向量与x轴方向一致f就上升,与x轴反向就f(x,y)下降,向量的大小就是变化的快慢,(想一下这个箭头要么朝x正向,要么朝x轴反向)记作:
A
⃗
=
[
∂
f
∂
x
,
0
]
\vec{A}= [\frac{\partial f}{\partial x}, 0]
A=[∂x∂f,0]
同样, x固定在h, 沿y轴变化率看成一个向量,这个向量与y轴方向一致f就上升,与y轴反向就f(x,y)下降,向量的大小就是变化的快慢,(想一下这个箭头要么朝y正向,要么朝y轴反向)记作:
B
⃗
=
[
0
,
∂
f
∂
y
]
\vec{B}= [0, \frac{\partial f}{\partial y}]
B=[0,∂y∂f]
梯度向量C=向量A+向量B就是梯度
C
⃗
=
A
⃗
+
B
⃗
=
[
∂
f
∂
x
,
∂
f
∂
y
]
\vec{C}=\vec{A}+\vec{B}=[\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}]
C=A+B=[∂x∂f,∂y∂f]
沿着向量C变化f(x,y)增加的最快。三维视频演示
grad f或者▽f (读del f 蛋嗷f)
单位向量u就是模长是1,如果单位向量与梯度向量夹角为0,方向一致的时候方向导数最大。
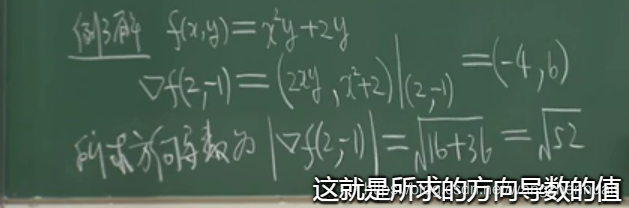
例3

例4
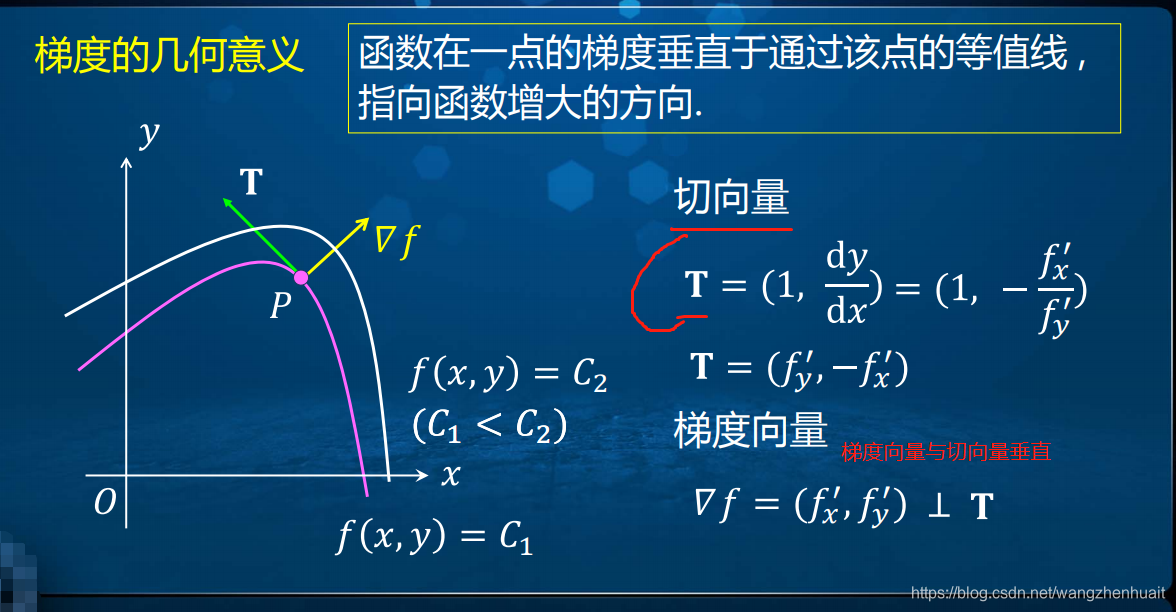
就是梯度方向
梯度向量的几何意义















 2147
2147











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









