






原标题:技术科普 | 一文了解音圈马达的驱动原理
第11期
庄子云: “鲲之大,不知其几千里也。化而为鸟,其名为鹏。鹏之背,不知其几千里也,怒而飞,其翼若垂天之云。”大鹏鸟展翅高飞借助的是风带来的动力。

可见,在一个运转的系统中,动力是多么的重要。我们的手机摄像头系统中也有一位车夫先生一直在任劳任怨地付出,为马达系统提供动力。

手机摄像头系统里“马达”一般指的是“音圈马达”,音圈马达只是一个简单的装置,将电流转化为机械力,它的定位和力的控制都是由外部的控制器决定,与音圈马达本身没有关系。而音圈马达也是因为其适合于“狭小空间”的特性被应用于手机摄像头系统中。

下面我们来认识一下这位无私奉献的车夫先生。
车夫的中文名叫做马达驱动芯片,英文名:VCM Driver IC。他可是个细心的家伙,他可以精准的控制马达内的线圈移动距离和方向,从而带动镜头的移动以达到完美的对焦效果。
那么这位车夫先生是靠什么力量来驱动马达的移动呢?
电流和磁场的奇妙结合,给了车夫先生这种超能力。先说段比较官方的:“通电导体在磁场中会产生安培力,力的大小取决于磁场强弱B , 电流I ; 力的方向取决于磁场B方向和电流I的方向。利用左手法则可以进行安培力方向判断,大拇指表示力的方向,食指表示磁场的方向,中指表示电流方向。电流为I、长为L的直导线。在匀强磁场B中受到的安培力大小为:F=ILBsin(I,B),其中(I,B)为电流方向与磁场方向间的夹角。”
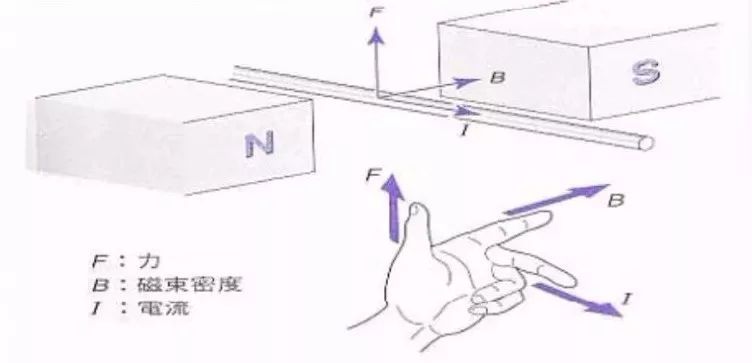
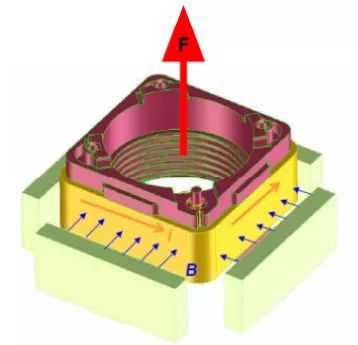
简单来说就是车夫先生提供“电流”这个源动力,电流供给VCM线圈后,利用VCM内的磁场,产生推动线圈(镜头)的力量。
所以在VCM不变的磁场中,我们只要通过控制电流的大小和方向就可以控制线圈带动镜头的精确移动了。
好了,掌握了这动力来源,我们好学的同学可能又会问了,驱动芯片是怎么来控制电流输出的大小呢?
驱动芯片控制原理:
哦no,我是谁?我在哪?我在看什么?
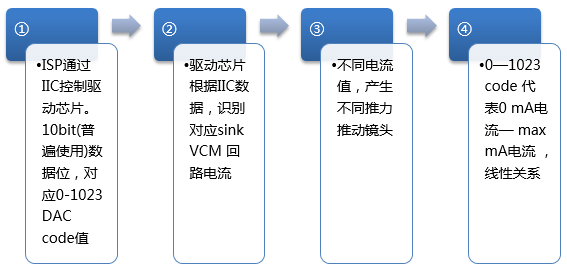
通俗点来说就是ISP通过控制DAC code值来改变输出电流值的大小。而ISP就是通过清晰度来判断该给多少DAC值。
这个流程大致如下:

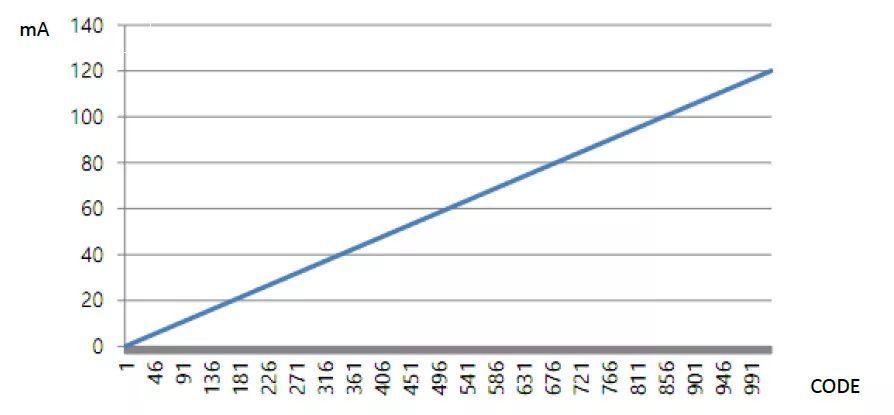
马达驱动芯片输入的DAC code值和输出的电流线性关系

某一款马达驱动芯片是10bit输出,最大输出电流是100mA。表示当10bit值为1111111111(二进制表示,十进制为1023)的时候,可以输出100mA的电流。如果想要输出50mA的电流,DAC code值需要设什么值呢?
插播一则广告:二进制了解一下?
二进制是计算技术中广泛采用的一种数制。每一位的输出只有0和1两种状态,就好比我们玩一个萝卜蹲的游戏。10bit就是有10位小伙伴,蹲下就是0,起立就是1,起立的小伙伴就会向系统输出信号。
现在公布答案:如果想要输出50mA的电流,DAC=0111111111(二进制)
大家明白了吗?

从上述来看马达驱动芯片输出多大的电流都是由后端平台来控制。当后端平台给出一点运动指令,马达就会带着镜头向目的地奔去;由于音圈马达内固定镜头的载体采用弹片固定,所以在到达指定的位置以后,由于弹片受力等因素,需要震荡一段时间之后才会稳定。马达驱动芯片在设计的时候,就引入了一个叫做“快速稳定”的功能。
手机在对焦过程当中马达的运动一般都是分为多步来走到清晰点的,这中间的每一步普通模式和快速稳定模式的区别是什么呢?可以想象一下,你拿着一个球,让它直接从二楼窗户丢下去,一个扔在海绵垫上,一个直接扔地上。然后观察它的弹跳高度,结果很明显,肯定是扔在海绵垫的弹得低且停稳得快,这就是快速稳定模式的表现效果。

开启快速稳定模式,每一步之间震荡幅度很小
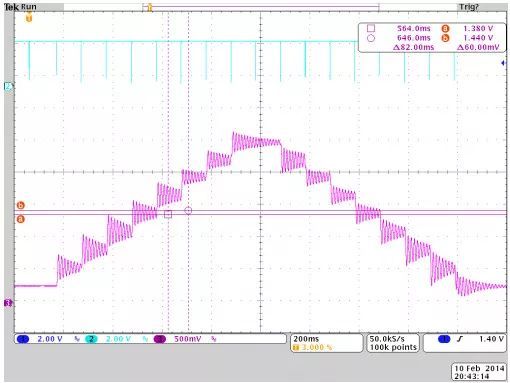
不开启快速稳定模式,每一步之间震荡幅度较大
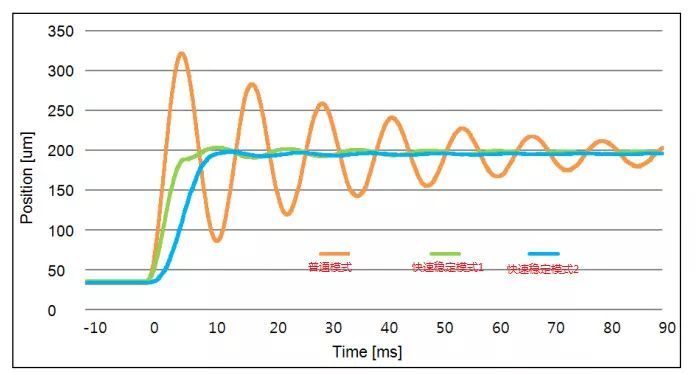
普通模式和两种快速稳定模式的稳定时间对比
相比之下,快速稳定模式是不是优势更加明显。
那么马达驱动芯片实现快速稳定功能的原理是什么呢?
下面介绍其中一种实现方式:
首先介绍一个概念,叫做马达的阻尼震荡,它是指马达受到摩擦和介质阻力或其他能耗而使振幅随时间逐渐衰减的振动。在振动过程中要不断克服外界阻力做功,消耗能量,振幅就会逐渐减小,经过一段时间,振动就会完全停下来。
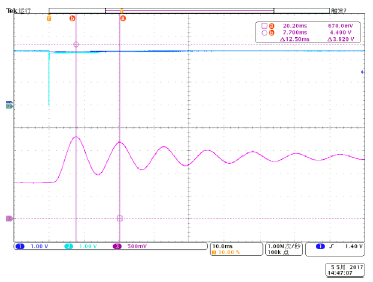
马达阻尼震荡
马达阻尼震荡类似于正弦波曲线,马达驱动芯片的主要功能就是抑制该曲线,得到一个平稳的移动波形。通过相位差方式,在固定的相位上通过提供反向、正向交替的推力,抑制阻尼震荡。
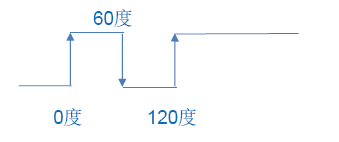
如上图马达驱动芯片在60度相位时候给一个反向的推力,在120度相位时候给一个正向的推力。
正弦波形可以理解成一个Sinx的曲线波形,类似于
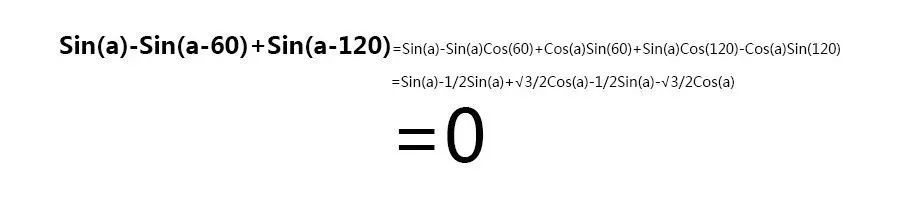
复杂的公式最后变成了0,嗨不嗨~
最后介绍一下马达驱动类型,按照功能大致可以分为以下几类:
单向电流驱动:主要配合openloop 马达;
双向电流驱动:可以输出正、负电流,主要配合中置马达;
闭环驱动:需要专门HALL传感器实现闭环回路;
OIS驱动:主要配合OIS马达,实现光学防抖;
PWM驱动:通过PWM波形式输出控制,实现低功耗。为了避免产生noise,一般需要增加同步信号。
讲到这里,
同学们认识这位车夫先生了吗?
其实关于这位车夫先生,还有更多的知识,请继续关注我们的技术科普栏目~
C部门-实习记者丨Tom排版编辑丨杜杜羊
▼
上期回顾
责任编辑:

















 9928
9928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









