






Linux下一直使用QT进行开发,支持cmake使得很容易导入其他工程。学习ROS过程中,很多函数名称难记,使用QT不仅可以提示补全,还为了以后开发GUI方便吧。
1、安装ros_qtc_plugin
首先安装Qt,Qt我安装的是5.5.1版本,直接下载run文件安装即可。同样,ros_qtc_plugin我也是直接下载run运行安装。安装完成后在Terminal可以见到有qtcreator-ros直接运行即可。
2、ROS工程建立
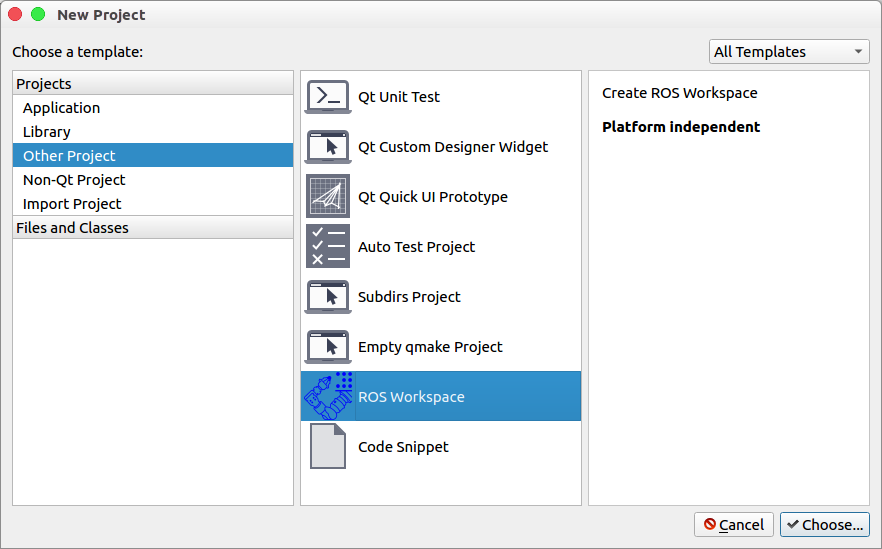
2.1、新建工作区,点击New Project 选择Other Project -> ROS Workspace:
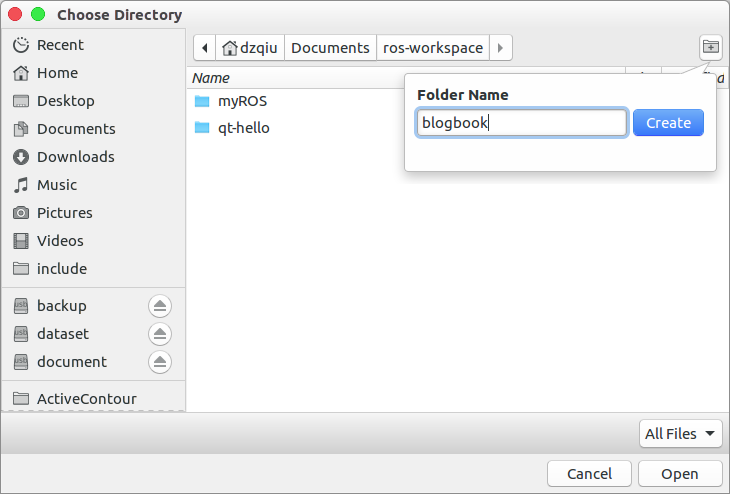
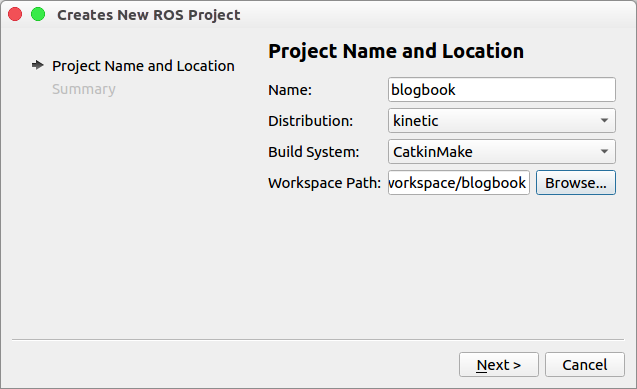
2.2、填写工作区名称,选择路径。选择路径时建议新建同名文件夹,工作区建立时没有自动新建文件夹:
2.3、新建package:左侧工程栏右击src,点击Add New,选择ROS -> Package
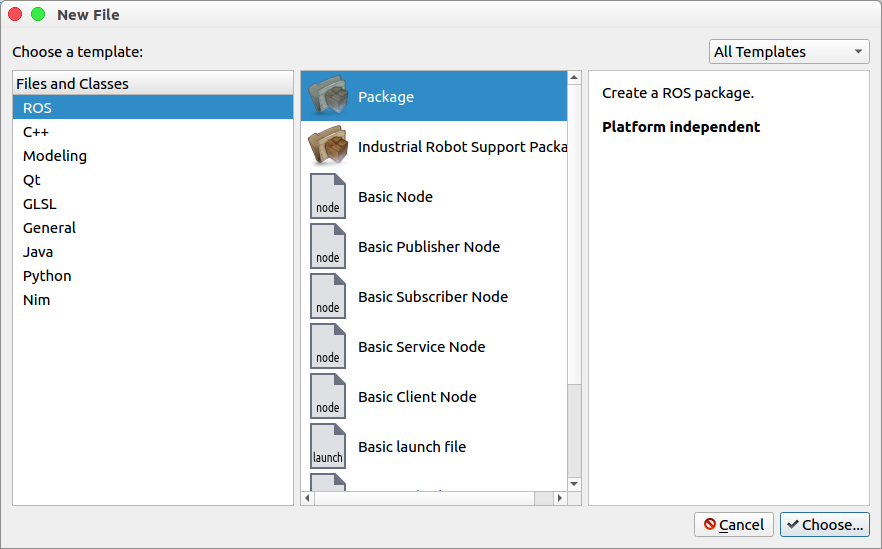
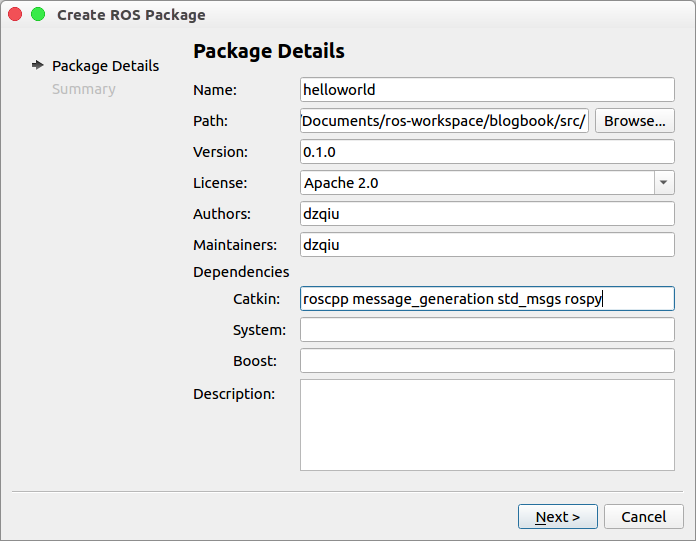
2.4、新建包的名字为hellowrld,配置包属性,一般需要依赖roscpp,这里我们写一对简单的发布、订阅程序,所以同时依赖roscpp message_generation std_msgs rospy,故配置如下:
2.5、现在我们来建立发布者节点文件,右键点击src -> Add New ->ROS ->Basic Publisher Node 命名为pub1.cpp
2.6、建立订阅者节点文件,右键点击src -> Add New ->ROS ->Basic Subscriber Node 命名为sub1.cpp。经过两步我们可以看到添加的两个文件,已经有写好的模板程序:
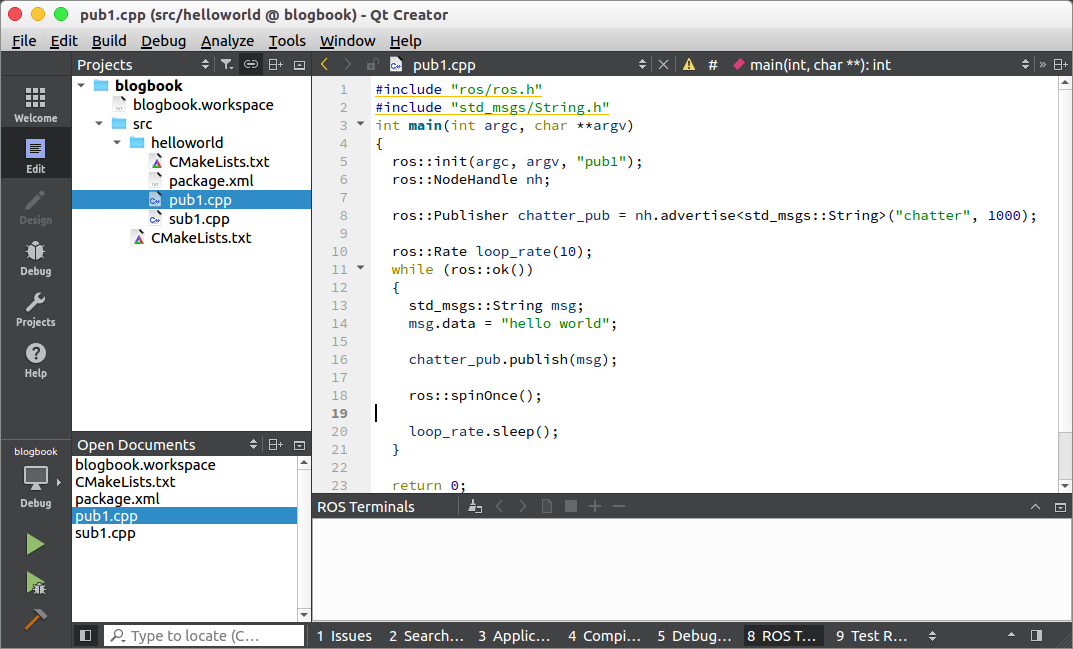
这时,我们看到Qt上面报错:找不到头文件,而且编辑时也没有提示补全!因为Qtcreator-ros中使用cmake来进行管理文件,在导入文件时没有在添加文件路劲进去cmakeList.txt中去。所以接下来做的就是添加关联!
2.7、添加生成可执行文件,并链接:在helloworld下的CMakeList.txt中添加下面几行:(注:add_executable尽量放在最后,不然生成的可执行文件会在build文件夹中而不是再devel中,最后导致rosrun报错找不到可执行文件(复制过去也行),血淋淋的教训):
add_executable(pub1 pub1.cpp)
target_link_libraries(pub1 ${catkin_LIBRARIES})
add_executable(sub1 sub1.cpp)
target_link_libraries(sub1 ${catkin_LIBRARIES})
2.8、右击blogbook,点击build,成功后重新打开cpp文件就不会再找不到头文件了。同时,工程也编译完毕!
3、执行文件
Qt内部可以添加run使得ROS节点很方便就能执行
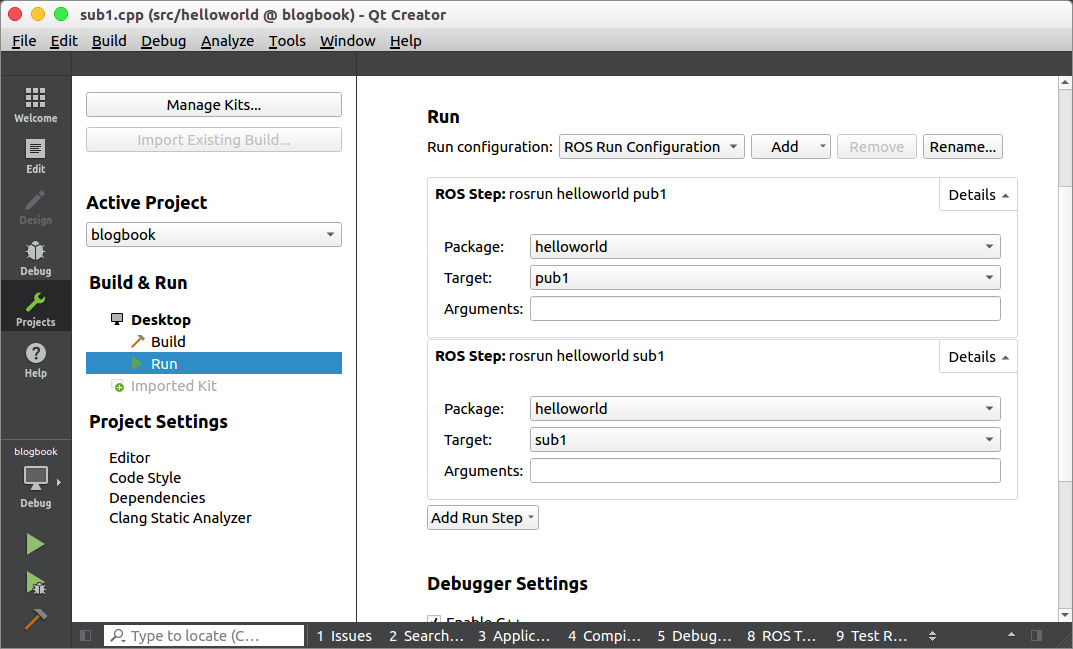
3.1、 添加run:点击最右边工具栏Project,再Build & Run中选择run, Add Run Step,选择package:helloworld, Target:pub1或者sub1(添加完一个添加另一个)
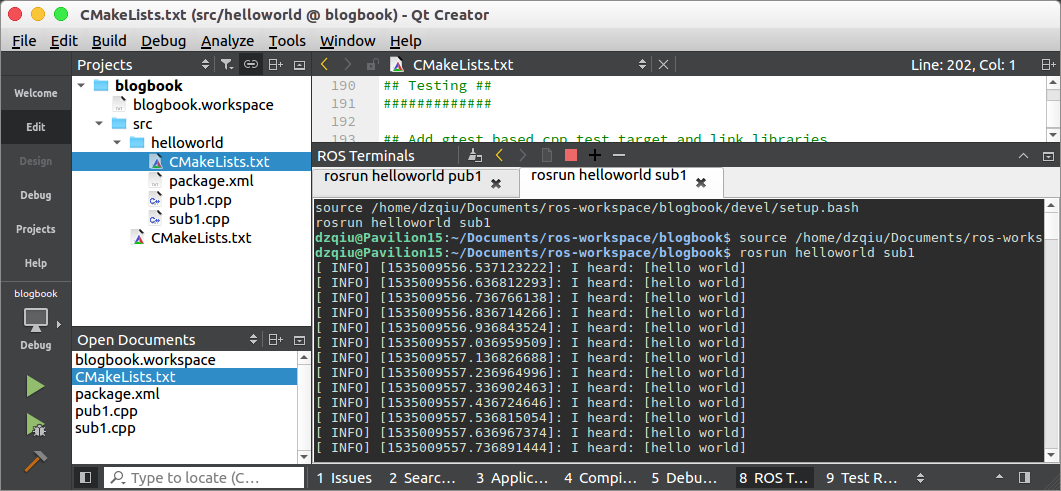
3.2、不要忘记先打开一个终端执行roscore,然后点击右边绿色三角或者工具栏中run运行。这时可能会发现没有运行结果??点击一栏:1、issues,2、Search...,3、Applic...点击三角形,选择08 ROS Terminal勾上可视即可。另外,可在发布者Terminal使用ctrl+c中断再运行,再观看订阅者Terminal!
结语:
从这个示例很容易发现ROS在消息传输(发布、订阅)中很容易协调,应该在多传感器数据的时候十分好用?期待。















 3676
3676











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









