






ROS坐标系统
1.ROS的三轴方向是根据右手法则来确定的,如下图所示,三个手指的分别代指X,Y,Z,X为正前方,Y为左面,Z为上方。
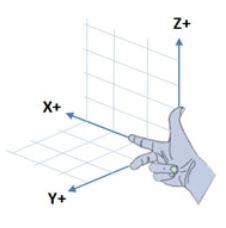
2.ROS每个轴的转向是根据右手来确定的。如下图所示,当我们的拇指代指为X,Y,Z任意一个轴时,逆时针就是这个轴的正向转向。

3.此外,ROS的线速度总是以米每秒(m / s)为单位,角速度则为弧度每秒(rad / s)。室内机器人如果以0.5 m / s的线性速度行驶,则已经相当快了(约1.1英里),而1.0rad / s的角速度相当于一个旋转6秒或10 RPM。对于一个室内机器人,我倾向于保持最大线性速度或低于0.2 m / s。















 3157
3157











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









