






前言:Gazebo是一款强大的3D仿真器,支持机器人开发所需的机器人、传感器和环境模型,并且通过搭载的物理引擎可以得到逼真的仿真结果。即便Gazebo是一款开源仿真器,却具有高水准的仿真性能,因此在机器人工程领域中非常流行。
前提:已安装了turtlebot3软件包,如没有安装,可参考:https://www.cnblogs.com/chendeqiang/p/10227401.html
https://github.com/huchunxu/ros_exploring
一、 启动“世界”仿真图像
roslaunch turtlebot_gazebo turtlebot_world.launch
------------------------------------
显示如下:

shift+鼠标左键 可以调整视角。
注:如果启动失败,可以注销后再重新打开就可以正常显示了。
二、启动键盘控制
启动键盘控制:
roslaunch turtlebot_teleop keyboard_teleop.launch
三、启动rviz查看turtlbot摄像机采集的信息
roslaunch turtlebot_rviz_launchers view_robot.launch
勾选左边的depthcloud就可以看到,记得切换一下topic。按鼠标左键可调整视角。
-----------------------------------------
显示如下:

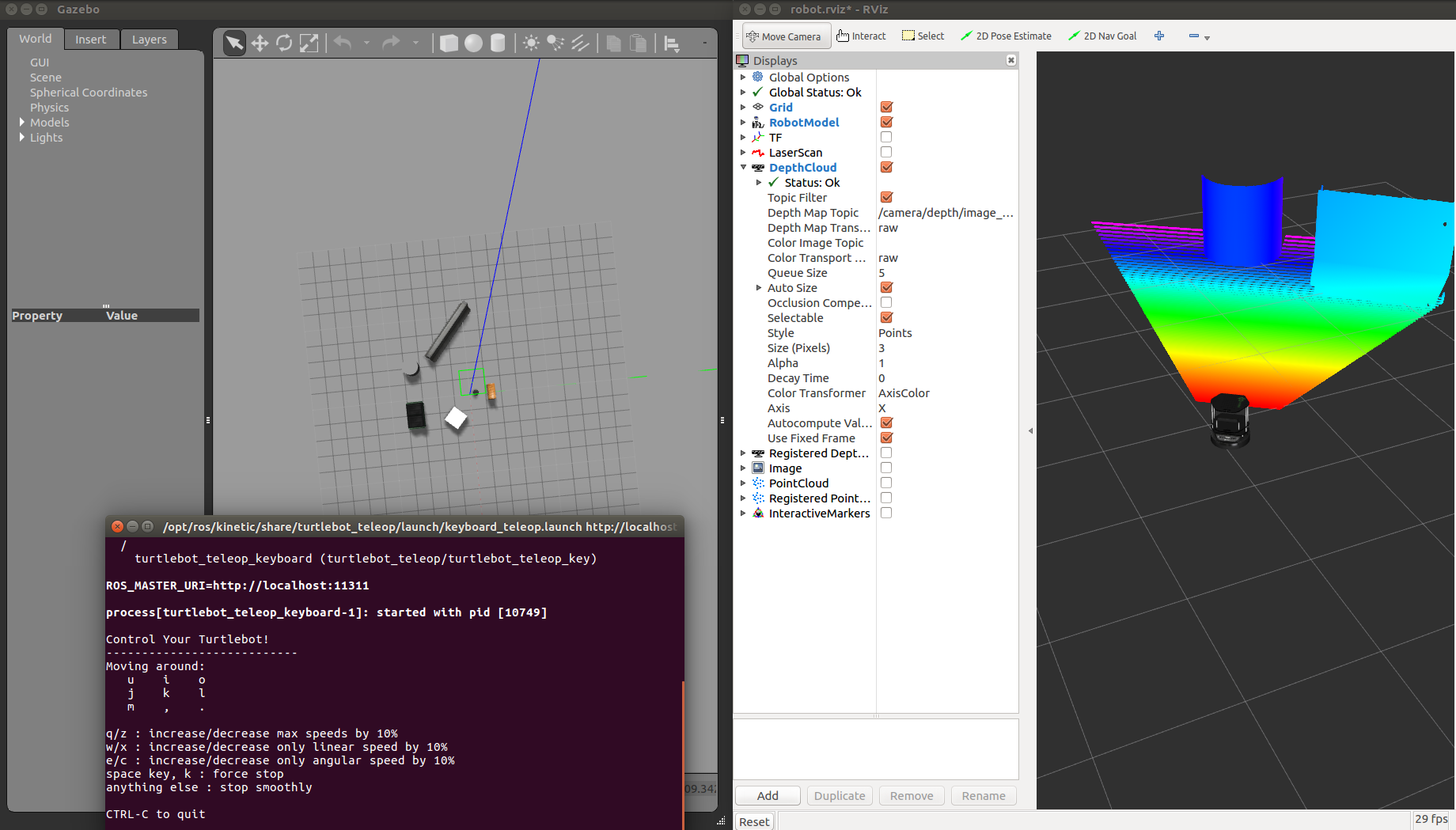
四、最终版
左边是gazebo,右边是rviz,前端是键盘控制。
五、launch文件解析
<launch> <!-- 设置launch文件的参数 --> <arg name="world_name" value="$(find mrobot_gazebo)/worlds/playground.world"/> <arg name="paused" default="false"/> <arg name="use_sim_time" default="true"/> <arg name="gui" default="true"/> <arg name="headless" default="false"/> <arg name="debug" default="false"/> <!-- 运行gazebo仿真环境 --> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(arg world_name)" /> <arg name="debug" value="$(arg debug)" /> <arg name="gui" value="$(arg gui)" /> <arg name="paused" value="$(arg paused)"/> <arg name="use_sim_time" value="$(arg use_sim_time)"/> <arg name="headless" value="$(arg headless)"/> </include> <!-- 加载机器人模型描述参数 --> <param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mrobot_gazebo)/urdf/mrobot.urdf.xacro'" /> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 --> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node> <!-- 运行robot_state_publisher节点,发布tf --> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" > <param name="publish_frequency" type="double" value="50.0" /> </node> <!-- 在gazebo中加载机器人模型--> <node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -model mrobot -param robot_description"/> </launch>
launch文件主要做了两件事:
1.启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人urdf模型;
2.启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。
六、运行摄像头仿真
启动仿真环境
roslaunch view_mrobot_with_camera_gazebo.launch
启动rqt
rqt_image_view
-END-















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









