






1.SJA1000 是一种独立控制器,用于移动目标和一般工业环境中的区域网络控制(CAN),它是PHILIPS半导体PCA82C200 CAN 控制器BasicCAN 的替代产品而且它增加了一种新的工作模式PeliCAN, 这种模式支持具有很多新特性的CAN 2.0B 协议.
2.SAEJ1939
SAE J1939(以下简称J1939)是美国汽车工程协会(SAE)的推荐标准,用于为中重型道路车辆上电子部件间的通讯提供标准的体系结构。它由“卡车与大型客车电气与电子委员会”(Track & Bus Electrical & Electronics Committee)下属的“卡车与大型客车控制和通讯网络附属委员会”(Track & Bus Control and Communications Network Subcommittee)开发编写。
SAE:Society of Automotive Engineers汽车工程协会
3. 控制器局域网络(CAN)是德国Robert bosch公司在20世纪80年代初为汽车业开发的一种串行数据通信总线。随着CAN在各种领域的应用和推广,对其通信格式的标准化提出了要求。1991年9月Philips Semiconductors制定并发布了CAN技术规范(Versio 2.0)。该技术包括A和B两部分。2.OA给出了CAN报文标准格式,而2.OB给出了标准的和扩展的两种格式。1993年11月ISO颁布了道路交通运输工具-数据信息交换-高速通信局域网(CAN)国际标准ISO11898,为控制局域网的标准化和规范化铺平了道路。美国的汽车工程学会SAE于2000年提出的J1939,成为货车和客车中控制器局域网的通用标准。
4.can2.0b与SAEj1939的关系
SAE J1939 协 议 是 基 于CAN2.0B 基 础 之 上 构 建的 , 对 CAN2.0B [的 29 位 ID 重新进行了定义, CAN2.0B以SAE J1939为核心,SAE J1939是CAN2.0B的具体应用。
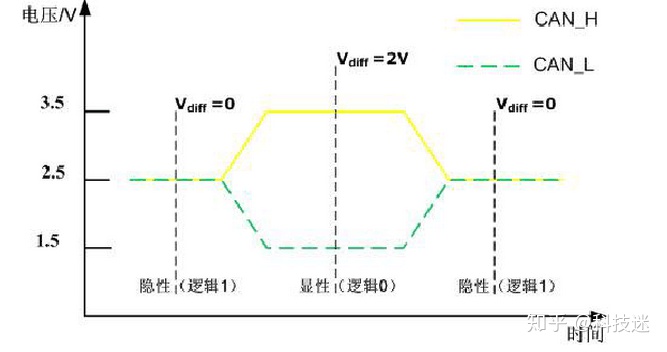
5.显性电平与隐形电平
逻辑0代表显性,逻辑1代表隐形。
差分电压定义: Vdiff = CAN_H - CAN_L
那个图中黄线为CAN_H波形,绿线为CAN_L
在波形左,右两端时,CAN_H=CAN_L=2.5v,称为"隐性" (差值为"0v")
在波形中间时,CAN_H=3.5V,CAN_L=1.5V,称为"显性" (差值为"2v")
在CAN规范中并未定义代表逻辑电平的物理状态(例如电压),iCAN网络使用符合ISO11898-2标准的电平信号,典型地,CAN总线为“隐性”(逻辑1)时,CAN_H和CAN_L的电平为2.5V(电位差为0V);CAN总线为“显性”(逻辑0)时,CAN_H和CAN_L的电平分别是3.5V和1.5V(电位差为2.5V)















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









