







estimator.cpp解读
代码共计1288行,今天先看前一段
欢迎讨论,有误斧正
共有函数如下:
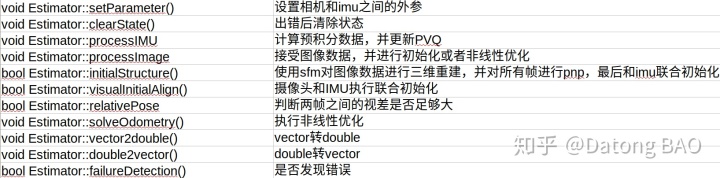
estimator.cpp是核心函数,串起了前端后端,并且体现了VINS的许多核心思想
具体函数代码解读&备注
1、void Estimator::setParameter()
用途:为求解器设置相机和imu之间的外参
主要思路:将parameter.cpp中的参数引入Estimator类中
void Estimator::setParameter()//设置相机和imu之间的外参
{
for (int i = 0; i < NUM_OF_CAM; i++)
{
tic[i] = TIC[i];
ric[i] = RIC[i];//初始的相机和imu的外参
}
cout << "1 Estimator::setParameter FOCAL_LENGTH: " << FOCAL_LENGTH << endl;
f_manager.setRic(ric);//设置Estimator和f_manager中的ric
project_sqrt_info_ = FOCAL_LENGTH / 1.5 * Matrix2d::Identity();//投影信息平方
td = TD;
}
2、void Estimator::clearState()
用途:将当前求解器的参数重置
主要思路:清道夫
void Estimator::clearState()//清除状态
{
for (int i = 0; i < WINDOW_SIZE + 1; i++)
{
Rs[i].setIdentity();
Ps[i].setZero();
Vs[i].setZero();
Bas[i].setZero();
Bgs[i].setZero();
dt_buf[i].clear();
linear_acceleration_buf[i].clear();
angular_velocity_buf[i].clear();
if (pre_integrations[i] != nullptr)
delete pre_integrations[i];
pre_integrations[i] = nullptr;
}
for (int i = 0; i < NUM_OF_CAM; i++)
{
tic[i] = Vector3d::Zero();
ric[i] = Matrix3d::Identity();
}
for (auto &it : all_image_frame)
{
if (it.second.pre_integration != nullptr)
{
delete it.second.pre_integration;
it.second.pre_integration = nullptr;
}
}
solver_flag = INITIAL;
first_imu = false,
sum_of_back = 0;
sum_of_front = 0;
frame_count = 0;
solver_flag = INITIAL;
initial_timestamp = 0;
all_image_frame.clear();
td = TD;
if (tmp_pre_integration != nullptr)
delete tmp_pre_integration;
tmp_pre_integration = nullptr;
last_marginalization_parameter_blocks.clear();
f_manager.clearState();
failure_occur = 0;
relocalization_info = 0;
drift_correct_r = Matrix3d::Identity();
drift_correct_t = Vector3d::Zero();
}
3、void Estimator::processIMU()
用途:计算预积分数据,并更新PVQ
主要思路:利用当前数据和之前的数据使用中值积分计算预积分,并更新PVQ数据
涉及变量:
double dt:时间间隔
const Vector3d &linear_acceleration:当前加速度
const Vector3d &angular_velocity:当前角速度
void Estimator::processIMU(double dt, const Vector3d &linear_acceleration, const Vector3d &angular_velocity)
{
if (!first_imu)//first_imu为false表示当前上报的imu数据为第一个imu数据
{
first_imu = true;
acc_0 = linear_acceleration;
gyr_0 = angular_velocity;
}
if (!pre_integrations[frame_count])//创建预积分对象,数据来自上次处理IMU的acc_0
{
//存疑,此处计算的预积分是0~frame_count的还是仅仅是frame——count的?
pre_integrations[frame_count] = new IntegrationBase{
acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
}
if (frame_count != 0)//当滑动窗口内有图像帧数据时,进行预积分 frame_count表示滑动窗口中图像数据的个数
{
pre_integrations[frame_count]->push_back(dt, linear_acceleration, angular_velocity);
//if(solver_flag != NON_LINEAR)
tmp_pre_integration->push_back(dt, linear_acceleration, angular_velocity);
dt_buf[frame_count].push_back(dt);
linear_acceleration_buf[frame_count].push_back(linear_acceleration);
angular_velocity_buf[frame_count].push_back(angular_velocity);
int j = frame_count;
//Rs应当是从上一个时刻的imu坐标系到世界坐标系
Vector3d un_acc_0 = Rs[j] * (acc_0 - Bas[j]) - g;//此处的Rs是上一时刻的,acc_0不是初始数据情况下,亦是
Vector3d un_gyr = 0.5 * (gyr_0 + angular_velocity) - Bgs[j];
Rs[j] *= Utility::deltaQ(un_gyr * dt).toRotationMatrix();
Vector3d un_acc_1 = Rs[j] * (linear_acceleration - Bas[j]) - g;
Vector3d un_acc = 0.5  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1115
1115











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









