






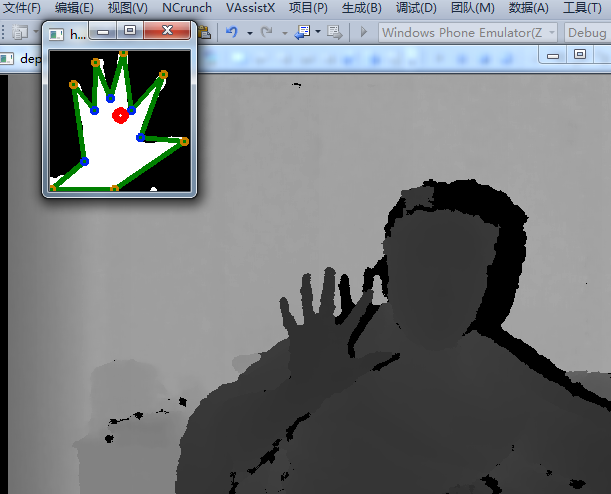
在谈谈NITE 2与OpenCV结合的第一个程序中,通过手心坐标能够粗略的截取手的图像信息,但还是有种意犹未尽的感觉,所以今天根据OpenCV常用的轮廓、凸包等图像处理函数,在此基础上,获得指尖坐标(我表示很粗糙,请高手们勿喷~~~)。
这里废话不多说了,直接上代码:
// YeHandTrackerUsingOpenCV.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <iostream> // 载入NiTE.h头文件 #include <NiTE.h> // 载入OpenCV头文件 #include "opencv2/opencv.hpp" #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> using namespace std; using namespace cv; const unsigned int XRES = 640; const unsigned int YRES = 480; const float DEPTH_SCALE_FACTOR = 255./4096.; const unsigned int BIN_THRESH_OFFSET = 5; const unsigned int ROI_OFFSET = 70; const unsigned int MEDIAN_BLUR_K = 5; const double GRASPING_THRESH = 0.9; // colors const Scalar COLOR_BLUE = Scalar(240,40,0); const Scalar COLOR_DARK_GREEN = Scalar(0, 128, 0); const Scalar COLOR_LIGHT_GREEN = Scalar(0,255,0); const Scalar COLOR_YELLOW = Scalar(0,128,200); const Scalar COLOR_RED = Scalar(0,0,255); // conversion from cvConvexityDefect struct ConvexityDefect { Point start; Point end; Point depth_point; float depth; }; // Thanks to Jose Manuel Cabrera for part of this C++ wrapper function void findConvexityDefects(vector<Point>& contour, vector<int>& hull, vector<ConvexityDefect>& convexDefects) { if(hull.size() > 0 && contour.size() > 0) { CvSeq* contourPoints; CvSeq* defects; CvMemStorage* storage; CvMemStorage* strDefects; CvMemStorage* contourStr; CvConvexityDefect *defectArray = 0; strDefects = cvCreateMemStorage(); defects = cvCreateSeq( CV_SEQ_KIND_GENERIC|CV_32SC2, sizeof(CvSeq),sizeof(CvPoint), strDefects ); //We transform our vector<Point> into a CvSeq* object of CvPoint. contourStr = cvCreateMemStorage(); contourPoints = cvCreateSeq(CV_SEQ_KIND_GENERIC|CV_32SC2, sizeof(CvSeq), sizeof(CvPoint), contourStr); for(int i = 0; i < (int)contour.size(); i++) { CvPoint cp = {contour[i].x, contour[i].y}; cvSeqPush(contourPoints, &cp); } //Now, we do the same thing with the hull index int count = (int) hull.size(); //int hullK[count]; int* hullK = (int*) malloc(count*sizeof(int)); for(int i = 0; i < count; i++) { hullK[i] = hull.at(i); } CvMat hullMat = cvMat(1, count, CV_32SC1, hullK); // calculate convexity defects storage = cvCreateMemStorage(0); defects = cvConvexityDefects(contourPoints, &hullMat, storage); defectArray = (CvConvexityDefect*)malloc(sizeof(CvConvexityDefect)*defects->total); cvCvtSeqToArray(defects, defectArray, CV_WHOLE_SEQ); for(int i = 0; i<defects->total; i++){ ConvexityDefect def; def.start = Point(defectArray[i].start->x, defectArray[i].start->y); def.end = Point(defectArray[i].end->x, defectArray[i].end->y); def.depth_point = Point(defectArray[i].depth_point->x, defectArray[i].depth_point->y); def.depth = defectArray[i].depth; convexDefects.push_back(def); } // release memory cvReleaseMemStorage(&contourStr); cvReleaseMemStorage(&strDefects); cvReleaseMemStorage(&storage); } } int main(int argc, char** argv) { // 初始化NITE nite::NiTE::initialize(); // 创建Hand跟踪器 nite::HandTracker* mHandTracker = new nite::HandTracker; mHandTracker->create(); Mat depthShow(YRES, XRES, CV_8UC1); Mat handDebug; // 从深度图像提取出手的轮廓大小 Rect roi; roi.width = ROI_OFFSET*2; roi.height = ROI_OFFSET*2; namedWindow("depthFrame", CV_WINDOW_AUTOSIZE); // 循环读取数据流信息并保存在HandFrameRef中 nite::HandTrackerFrameRef mHandFrame; // 开始手势探测 mHandTracker->startGestureDetection(nite::GESTURE_CLICK); int key = 0; while(key != 27 && key != 'q') { // 读取Frame信息 nite::Status rc = mHandTracker->readFrame(&mHandFrame); if (rc != nite::STATUS_OK) { cout << "GetNextData failed" << endl; return 0; } // 将深度数据转换成OpenCV格式 const cv::Mat depthRaw( mHandFrame.getDepthFrame().getHeight(), mHandFrame.getDepthFrame().getWidth(), CV_16UC1, (void*)mHandFrame.getDepthFrame().getData()); /*memcpy(depthRaw.data, mHandFrame.getDepthFrame().getData(), XRES*YRES*2);*/ depthRaw.convertTo(depthShow, CV_8U, DEPTH_SCALE_FACTOR); // 获取定位的手的快照信息,读取此时一共有多少个手势 const nite::Array<nite::GestureData>& gestures = mHandFrame.getGestures(); for (int i = 0; i < gestures.getSize(); ++i) { // 当获取的手势是正确完成了 if (gestures[i].isComplete()) { // 就开始定位此时手势的坐标 const nite::Point3f& position = gestures[i].getCurrentPosition(); cout << "Gesture " << gestures[i].getType() << " at" << position.x << "," << position.y <<"," << position.z; // nite::HandId newId ===>typedef short int HandId; nite::HandId newId; // 开始跟踪该有效手势的手心坐标,并确定该手的Id。 // 函数原型为:NITE_API NiteStatus niteStartHandTracking(NiteHandTrackerHandle, const NitePoint3f*, NiteHandId* pNewHandId); mHandTracker->startHandTracking(gestures[i].getCurrentPosition(), &newId); } } // 获取定位手。 const nite::Array<nite::HandData>& hands= mHandFrame.getHands(); for (int i = 0; i < hands.getSize(); ++i) { const nite::HandData& user = hands[i]; if (!user.isTracking()) { cout << "Lost hand %d\n" << user.getId(); nite::HandId id = user.getId(); } else { if (user.isNew()) { cout << "Found hand %d\n" << user.getId(); } else { float x, y; // 将手心坐标转换映射到深度坐标中 mHandTracker->convertHandCoordinatesToDepth(hands[i].getPosition().x, hands[i].getPosition().y, hands[i].getPosition().z, &x, &y); float handDepth = hands[i].getPosition().z * DEPTH_SCALE_FACTOR; roi.x = x - ROI_OFFSET; roi.y = y - ROI_OFFSET; // 从深度图像中提取手的轮廓图像 Mat handCpy(depthShow, roi); Mat handMat = handCpy.clone(); // binary threshold handMat = (handMat > (handDepth - BIN_THRESH_OFFSET)) & (handMat < (handDepth + BIN_THRESH_OFFSET)); // 平滑处理 medianBlur(handMat, handMat, MEDIAN_BLUR_K); // create debug image of thresholded hand and cvt to RGB so hints show in color handDebug = handMat.clone(); cvtColor(handDebug, handDebug, CV_GRAY2RGB); // 提取手的轮廓 std::vector< std::vector<Point> > contours; findContours(handMat, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE); if (contours.size()) { for (int i = 0; i < contours.size(); i++) { vector<Point> contour = contours[i]; Mat contourMat = Mat(contour); double cArea = contourArea(contourMat); if(cArea > 2000) { // 计算得到轮廓中心坐标 Scalar center = mean(contourMat); Point centerPoint = Point(center.val[0], center.val[1]); // 通过道格拉斯-普克算法得到一个简单曲线(近似的轮廓) vector<Point> approxCurve; approxPolyDP(contourMat, approxCurve, 10, true); // 画出轮廓 vector< vector<Point> > debugContourV; debugContourV.push_back(approxCurve); drawContours(handDebug, debugContourV, 0, COLOR_DARK_GREEN, 3); // 计算轮廓点的凸包。 vector<int> hull; convexHull(Mat(approxCurve), hull, false, false); // 画出凸包点 for(int j = 0; j < hull.size(); j++) { int index = hull[j]; circle(handDebug, approxCurve[index], 3, COLOR_YELLOW, 2); } // 查找凸缺陷 vector<ConvexityDefect> convexDefects; findConvexityDefects(approxCurve, hull, convexDefects); for(int j = 0; j < convexDefects.size(); j++) { circle(handDebug, convexDefects[j].depth_point, 3, COLOR_BLUE, 2); } // 利用轮廓、凸包、缺陷等点坐标确定指尖等点坐标,并画出 vector<Point> hullPoints; for(int k = 0; k < hull.size(); k++) { int curveIndex = hull[k]; Point p = approxCurve[curveIndex]; hullPoints.push_back(p); } double hullArea = contourArea(Mat(hullPoints)); double curveArea = contourArea(Mat(approxCurve)); double handRatio = curveArea/hullArea; if(handRatio > GRASPING_THRESH) circle(handDebug, centerPoint, 5, COLOR_LIGHT_GREEN, 5); else circle(handDebug, centerPoint, 5, COLOR_RED, 5); // 显示结果 imshow("hand", handDebug); } } } } } } imshow("depthFrame", depthShow); key = waitKey(10); } // 关闭Frame mHandFrame.release(); // 关闭跟踪器 mHandTracker->destroy(); // 关闭NITE环境 nite::NiTE::shutdown(); return 0; }
运行结果:
对于初学者的我来说,每增加一行代码,就意味着自己在进步一点;在此记录下自己的学习历程,希望高手们多多提点,希望和我一样的初学者互相学习交流~~~














 1111
1111











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









