







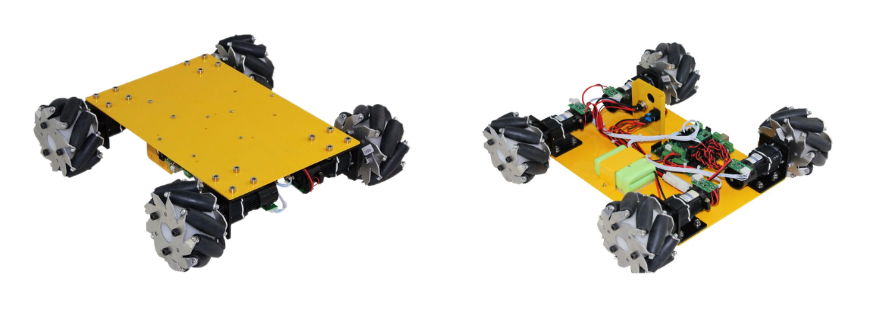
Motion controller simulator for 4WMV ( plan to support 4WD/2WD)
I am going to create an build in app on pixhawk to control a mecanum wheel platform.....
I control it via PC currently...
source code :
https://github.com/cctsao1008/devc_motion_controller

1. 4WD mecanum wheel platform (4WMV)
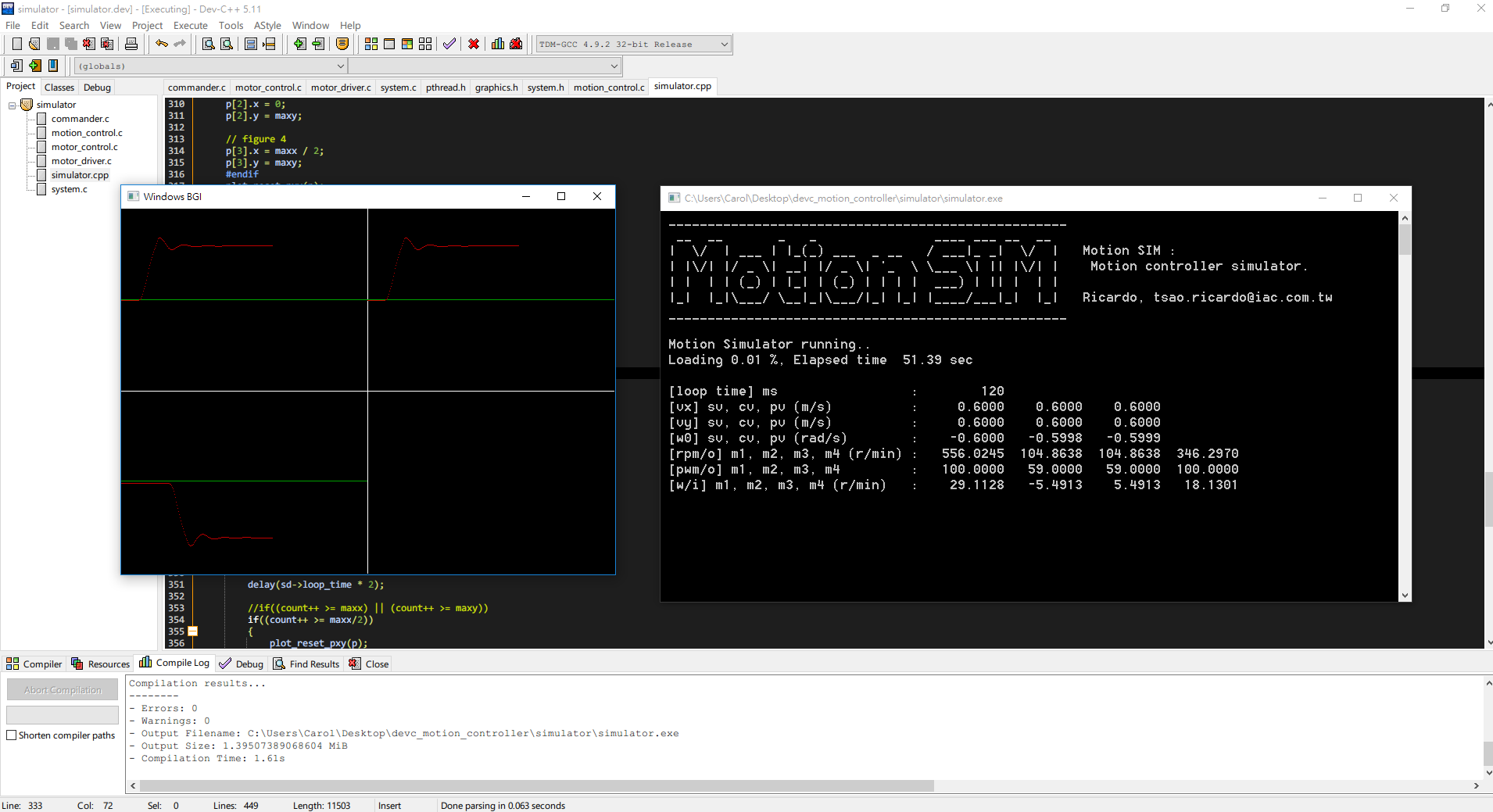
2. Motion control simulator
3. Response pilot



4. Motion control algorithm
/**
* @file motion_control.c
*
* motion control
*
* @author Ricardo <tsao.ricardo@iac.com.tw>
*/
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include <math.h>
#include <time.h>
#include "system.h"
#include "..\platform\platform.h"
#include "small-matrix-inverse\invert4x4_c.h"
#define DEBUG false
static bool initialized = false;
static float R = DEFAULT_R;
/* kinematics equations */
bool kinematics_init(system_data* sd);
bool forward_kinematics(system_data* sd);
bool inverse_kinematics(system_data* sd);
/* pid control */
bool pid_control_init(system_data* sd);
bool pid_control_update(system_data* sd);
bool soft_brake(system_data* sd);
bool motion_control_init(system_data* sd)
{
MSG(sd->log, "%s", "[INFO] motion_control_init... \n");
if(sd == NULL)
{
MSG(sd->log, "[ERROR] motion_control_update, failed! \n");
return false;
}
if(initialized == true)
return true;
if(!kinematics_init(sd))
return false;
pid_control_init(sd);
initialized = true;
return true;
}
bool motion_control_update(system_data* sd)
{
if((sd == NULL) || (initialized != true))
{
MSG(sd->log, "[ERROR] motion_control_update, failed! \n");
return false;
}
if(sd->sv.vx > DEFAULT_MAX_VX)
sd->sv.vx = DEFAULT_MAX_VX;
if(sd->sv.vy > DEFAULT_MAX_VY)
sd->sv.vy = DEFAULT_MAX_VY;
if(sd->sv.w0 > DEFAULT_MAX_W0)
sd->sv.w0 = DEFAULT_MAX_W0;
/* calculating feedback signals, vx, vy, w0 */
forward_kinematics(sd);
/* calculating output signals, vx, vy, w0 */
pid_control_update(sd);
/* calculating output signals, w1, w2, w3, w4 */
inverse_kinematics(sd);
return true;
}
/* get the inverted matrix of RV(4x4) */
bool kinematics_init(system_data* sd)
{
uint16_t i = 0, row = 0, col = 0;
float mat_inverse[4][4] = {{1.0f, 1.0f, -(DEFAULT_L1 + DEFAULT_L2), 0.0f},
{1.0f, -1.0f, (DEFAULT_L1 + DEFAULT_L2), 0.0f},
{1.0f, -1.0f, -(DEFAULT_L1 + DEFAULT_L2), 0.0f},
{1.0f, 1.0f, (DEFAULT_L1 + DEFAULT_L2), 1.0f}};
float mat_forward[4][4] = {0};
float mat_src[16] = {0};
float mat_dst[16] = {0};
if(sd == NULL)
{
MSG(sd->log, "[ERROR] kinematics_init, failed! \n");
return false;
}
if(initialized == true)
return true;
#if DEBUG
for(i = 0 ; i < 16 ; i++)
{
if(i < 1)
MSG(sd->log, "[DEBUG] mat_inverse(2D) : \n");
row = (i / 4); col = (i % 4);
MSG(sd->log, "%9.4f(%d%d) ", mat_inverse[row][col], row, col);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
}
#endif
for(i = 0; i < 16; i++)
{
row = (i / 4); col = (i % 4);
mat_src[i] = mat_inverse[row][col];
#if DEBUG
if(i < 1)
MSG(sd->log, "[DEBUG] mat_inverse(2D) to mat_src(1D) \n");
MSG(sd->log, "%9.4f(%2d) ", mat_src[i], i);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
#endif
}
if(!invert4x4(mat_src, mat_dst))
{
MSG(sd->log, "[ERROR] matrix singular! \n");
return false;
}
#if DEBUG
for(i = 0 ; i < 16 ; i++)
{
if(i < 1)
MSG(sd->log, "[DEBUG] mat_dst(1D) = \n");
row = (i / 4); col = (i % 4);
MSG(sd->log, "%9.4f(%2d) ", mat_dst[i], i);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
}
#endif
for(i = 0; i < 16; i++)
{
row = (i / 4); col = (i % 4);
mat_forward[row][col] = mat_dst[i];
#if DEBUG
if(i < 1)
MSG(sd->log, "[DEBUG] mat_dst(1D) to mat_forward(2D) \n");
MSG(sd->log, "%9.4f(%d%d) ", mat_forward[row][col], row, col);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
#endif
}
memcpy(sd->mat_inverse, mat_inverse, sizeof(mat_inverse));
memcpy(sd->mat_forward, mat_forward, sizeof(mat_forward));
#if DEBUG
for(i = 0 ; i < 16 ; i++)
{
if(i < 1)
MSG(sd->log, "[DEBUG] sd->mat_inverse(2D) = \n");
row = (i / 4); col = (i % 4);
MSG(sd->log, "%9.4f(%d%d) ", sd->mat_inverse[row][col], row, col);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
}
for(i = 0 ; i < 16 ; i++)
{
if(i < 1)
MSG(sd->log, "[DEBUG] sd->mat_forward(2D) = \n");
row = (i / 4); col = (i % 4);
MSG(sd->log, "%9.4f(%d%d) ", sd->mat_forward[row][col], row, col);
if(((i + 1) % 4 == 0) || (i == 15))
MSG(sd->log, "%s", (i < 15)? "\n":"\n\n");
}
#endif
return true;
}
/* inverse kinematics equation */
bool inverse_kinematics(system_data* sd)
{
float vx = sd->cv.vx;
float vy = sd->cv.vy;
float w0 = sd->cv.w0;
float mat[4][4] = {0};
if(sd == NULL)
{
MSG(sd->log, "[ERROR] inverse_kinematics, failed! \n");
return false;
}
memcpy(mat, sd->mat_inverse, sizeof(mat));
sd->mot.out.w1 = (1.0f / R) * (mat[0][0] * vx + mat[0][1] * vy + mat[0][2] * w0);
sd->mot.out.w2 = (1.0f / R) * (mat[1][0] * vx + mat[1][1] * vy + mat[1][2] * w0);
sd->mot.out.w3 = (1.0f / R) * (mat[2][0] * vx + mat[2][1] * vy + mat[2][2] * w0);
sd->mot.out.w4 = (1.0f / R) * (mat[3][0] * vx + mat[3][1] * vy + mat[3][2] * w0);
#if DEBUG
MSG(sd->log, "[DEBUG] inverse_kinematics : \n");
MSG(sd->log, "vx, vy (m/s), w0 (rad/s) = \n");
MSG(sd->log, "%9.4f %9.4f %9.4f \n\n", vx, vy, w0);
MSG(sd->log, "w1, w2, w3, w4 (rad/s) = \n");
MSG(sd->log, "%9.4f %9.4f %9.4f %9.4f \n\n", sd->mot.out.w1, sd->mot.out.w2,
sd->mot.out.w3, sd->mot.out.w4);
#endif
return true;
}
/* forward kinematics equation */
bool forward_kinematics(system_data* sd)
{
float w1 = sd->mot.in.w1;
float w2 = sd->mot.in.w2;
float w3 = sd->mot.in.w3;
float w4 = sd->mot.in.w4;
float mat[4][4] = {0};
if(sd == NULL)
{
MSG(sd->log, "[ERROR] forward_kinematics, failed! \n");
return false;
}
memcpy(mat, sd->mat_forward, sizeof(mat));
sd->pv.vx = R * (mat[0][0] * w1 + mat[0][1] * w2 + mat[0][2] * w3 + mat[0][3] * w4);
sd->pv.vy = R * (mat[1][0] * w1 + mat[1][1] * w2 + mat[1][2] * w3 + mat[1][3] * w4);
sd->pv.w0 = R * (mat[2][0] * w1 + mat[2][1] * w2 + mat[2][2] * w3 + mat[2][3] * w4);
#if DEBUG
MSG(sd->log, "[DEBUG] forward_kinematics : \n");
MSG(sd->log, "w1, w2, w3, w4 (rad/s) = \n");
MSG(sd->log, "%9.4f %9.4f %9.4f %9.4f \n\n", w1, w2, w3, w4);
MSG(sd->log, "vx, vy (m/s), w0 (rad/s) = \n");
MSG(sd->log, "%9.4f %9.4f %9.4f \n\n", sd->pv.vx, sd->pv.vy, sd->pv.w0);
#endif
return true;
}
bool pid_control_init(system_data* sd)
{
sd->vx_ga.kp = 0.1f;
sd->vx_ga.ki = 0.0f;
sd->vx_ga.kd = 0.05f;
sd->vy_ga.kp = 0.1f;
sd->vy_ga.ki = 0.0f;
sd->vy_ga.kd = 0.05f;
sd->w0_ga.kp = 0.1f;
sd->w0_ga.ki = 0.0f;
sd->w0_ga.kd = 0.05f;
return true;
}
bool pid_control_update(system_data* sd)
{
static float vx_err_prev, vy_err_prev, w0_err_prev;
static float vx_err, vy_err, w0_err;
static float vx_err_sum_prev, vy_err_sum_prev, w0_err_sum_prev;
static float vx_err_sum, vy_err_sum, w0_err_sum;
static float vx_err_dif, vy_err_dif, w0_err_dif;
static float p_out[3], i_out[3], d_out[3];
sd->t_prev = sd->t_curr;
sd->t_curr = clock();
sd->t_delta = sd->t_curr - sd->t_prev;
if(sd->t_delta < 0.0f)
{
MSG(sd->log, "[ERROR] pid_control_update, failed! \n");
return false;
}
#if DEBUG
MSG(sd->log, "[DEBUG] pid_control_update : \n");
MSG(sd->log, "t_prev, t_curr, t_delta (ms) = \n");
MSG(sd->log, "%9.4ld %9.4ld %9.4ld \n\n", sd->t_prev, sd->t_curr, sd->t_delta);
#endif
/* proportional */
vx_err = sd->sv.vx - sd->pv.vx;
vy_err = sd->sv.vy - sd->pv.vy;
w0_err = sd->sv.w0 - sd->pv.w0;
/* integral */
vx_err_sum = vx_err * (sd->t_delta / 1000.0f) + vx_err_sum_prev;
vy_err_sum = vy_err * (sd->t_delta / 1000.0f) + vy_err_sum_prev;
w0_err_sum = w0_err * (sd->t_delta / 1000.0f) + w0_err_sum_prev;
/* derivative */
vx_err_dif = (vx_err - vx_err_prev) / (sd->t_delta / 1000.0f) ;
vy_err_dif = (vy_err - vy_err_prev) / (sd->t_delta / 1000.0f) ;
w0_err_dif = (w0_err - w0_err_prev) / (sd->t_delta / 1000.0f) ;
/* gain */
p_out[0] = sd->vx_ga.kp * vx_err;
i_out[0] = sd->vx_ga.ki * vx_err_sum;
d_out[0] = sd->vx_ga.kd * vx_err_dif;
p_out[1] = sd->vy_ga.kp * vy_err;
i_out[1] = sd->vy_ga.ki * vy_err_sum;
d_out[1] = sd->vy_ga.kd * vy_err_dif;
p_out[2] = sd->w0_ga.kp * w0_err;
i_out[2] = sd->w0_ga.ki * w0_err_sum;
d_out[2] = sd->w0_ga.kd * w0_err_dif;
/* summation */
sd->cv.vx += p_out[0] + i_out[0] + d_out[0];
sd->cv.vy += p_out[1] + i_out[1] + d_out[1];
sd->cv.w0 += p_out[2] + i_out[2] + d_out[2];
//soft_brake(sd);
#if DEBUG
MSG(sd->log, "[DEBUG] pid_control_update : \n");
MSG(sd->log, "vx, p_out, i_out, d_out = \n");
MSG(sd->log, "%9.4f %9.4f %9.4f, %9.4f %9.4f, %9.4f \n\n", p_out[0], i_out[0], d_out[0], vx_err, vx_err_prev, sd->cv.vx);
#endif
vx_err_prev = vx_err;
vy_err_prev = vy_err;
w0_err_prev = w0_err;
vx_err_sum_prev = vx_err_sum;
vy_err_sum_prev = vy_err_sum;
w0_err_sum_prev = w0_err_sum;
return true;
}















 1772
1772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









