






作者:Nicholas
链接:https://www.zhihu.com/question/41514206/answer/104827395
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
链接:https://www.zhihu.com/question/41514206/answer/104827395
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
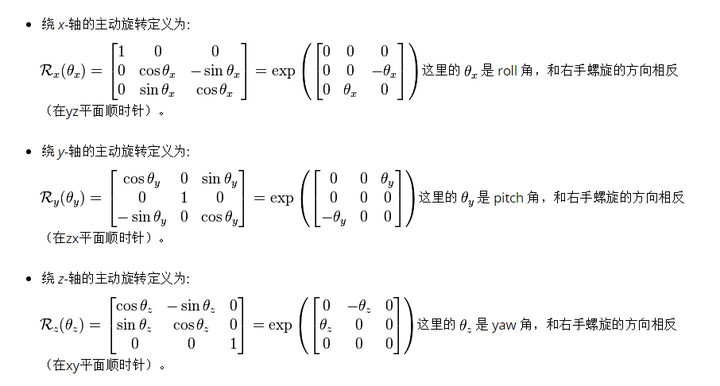
先由三个角度算绕各自轴的旋转矩阵
 根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为
根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为
 根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为
根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为

这个R是3*3的,最终的4*4转换矩阵是酱紫的(不会写latex只能手画了)
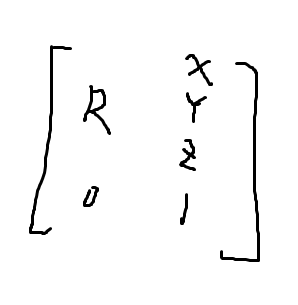
根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为
根据你定义的转序求旋转矩阵R,比如zyx(321)转序的旋转矩阵为
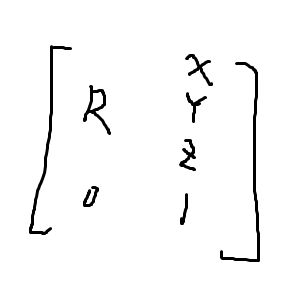
这个R是3*3的,最终的4*4转换矩阵是酱紫的(不会写latex只能手画了)
















 6064
6064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









