






 本文介绍了OpenCV 4.5.1新增的四元数功能,包括四元数的创建、计算和应用。四元数可用于表示三维空间旋转,通过轴角、实数或旋转矩阵等方式定义。讨论了四元数的取值、叉乘、点乘、指数计算、旋转角和轴的计算、求逆等运算。并展示了如何使用四元数对坐标点进行旋转。
本文介绍了OpenCV 4.5.1新增的四元数功能,包括四元数的创建、计算和应用。四元数可用于表示三维空间旋转,通过轴角、实数或旋转矩阵等方式定义。讨论了四元数的取值、叉乘、点乘、指数计算、旋转角和轴的计算、求逆等运算。并展示了如何使用四元数对坐标点进行旋转。
作者:单晨琪 孔良潜 王龙步(华为开源能力中心)
在新发布的OpenCV 4.5.1中,我们为OpenCV贡献了四元数的功能。本文对此功能进行介绍。
四元数简介
四元数由爱尔兰数学家W.R.Hamilton在1843年提出并建立相关理论。它可以表示三维空间的旋转。
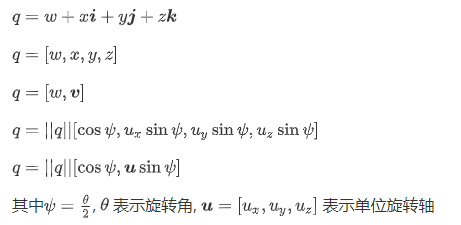
四元数可以通过如下五种方式进行定义:
四元数的创建:
1.通过旋转轴和旋转角创建四元数
轴角的含义是绕某个轴旋转一定角度,围绕单位旋转轴u以旋转角θ进行旋转的四元数:
using namespace cv;
double angle = CV_PI;
Vec3d axis = {0, 0, 1}; //旋转轴不需要用户单独执行归一化操作
Quatd q = Quatd::createFromAngleAxis(angle, axis);
2.通过四个实数w, x, y, z创建四元数
Quatd q(1, 2, 3, 4);
3.使用4维Vector创建四元数
Vec4d vec{1, 2, 3, 4};
Quatd q(vec); //[1,2,3,4]
Vec4f vec{1, 2, 3, 4};
Quatf q(vec); //[1,2,3,4]
4 . 通过旋转矩阵R创建四元数
Quatd q = Quatd::createFromRotMat(R)
四元数的计算
在这里的函数基本上都可以通过func(obj)的形式进行操作,例如exp(q),而无需写成不容易阅读的形式q.exp()。当你确定在操作中的四元数是一个归一化的四元数时,可以通过添加枚举类QuatAssumeType中的QUAT_ASSUME_UNIT参数来加速运算,当然不加也不会有影响。
1.四元数取值:
共有三种方式获取四元数的实数部分:
Quatf q(1,2,3,4);
std::cout << q.w << std::endl; // w=1, x=2, y=3, z=4
std::cout << q[0] << std::endl; // q[0]=1, q[1]=2, q[2]=3, q[3]=4
std::cout << q.at(0) << std::endl;// 1
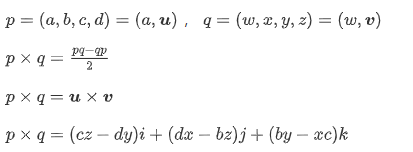
2.叉乘 crossProduct
Quatd q{1,2,3,4};
Quatd p{5,6,7,8};
p.crossProduct(q);//Quat [0,-4,8,-4]
3.点乘 dot

Quatd q(1,2,3,4);
Quatd p(5,6,7,8);
p.dot(q);//70
4.指数计算
四元数指数计算公式:
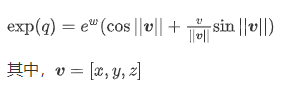
Quatd q{1,2,3,4};
cout << q.exp() << endl;//Quat [1.69392, -0.78956, -1.184634, -1.57912]
//or
exp(q);
5.计算旋转角
Quatd q(1,2,3,4);
q.getAngle(); //2.77438
QuatAssumeType assumeUnit = QUAT_ASSUME_UNIT;
q.normalize().getAngle(assumeUnit);//与q.getAngle()相同。用户也可以先将四元数进行归一化,再求旋转角
6.计算旋转轴:
Quatd q(1,2,3,4);
q.getAxis(); //[0.371391, 0.557086, 0.742781]
QuatAssumeType assumeUnit = QUAT_ASSUME_UNIT;
q.normalize().getAxis(assumeUnit);//same as q.getAxis()
7.求逆运算
Quatd q(1,2,3,4);
q.inv(); //Quat [0.0333333, -0.0666667, -0.1, -0.133333]
QuatAssumeType assumeUnit = QUAT_ASSUME_UNIT;
q = q.normalize();
q.inv(assumeUnit); //Quat [0.182574, -0.365148, -0.547723, -0.730297]
//参数assumeUnit 表示 p 是已经归一化的四元数
8.求sin, cos值
Quatd q(1,2,3,4);
q.sin(); //Quat [91.7837, 21.8865, 32.8297, 43.773]
//or
sin(q);
q.cos(); //Quat [58.9336, -34.0862, -51.1293, -68.1724]
//or
cos(q);
9.其他部分运算
本文列出四元数的常用基本运算,更多详情可见https://docs.opencv.org/master/da/d4a/classcv_1_1Quat.html

四元数的应用
利用四元数,将坐标上的点进行旋转:
对于坐标上的点 , 根据四元数q进行旋转,得到新的坐标
double angle = CV_PI;
Vec3d axis{0,0,1};
Quatd q_unit = Quatd::createFromAngleAxis(angle, axis);
//假设旋转点(1,0,1)
Mat pointsA = (Mat_<double>(1, 3) << 1,0,1);
//change the shape
pointsA = pointsA.t();
// 将两个点围绕z轴旋转180度
// 1.通过将四元数转换为旋转矩阵后,再求解新的坐标
Mat new_point1 = q_unit.toRotMat3x3() * pointsA;
// 打印结果
cout << new_point1 << endl; //[-1; 1.224646799147353e-16; 1]
//2. 将坐标转化为四元数,在通过四元数的乘法求解新的坐标
Mat new_point2 = q_unit * pointsA * (q_unit.inv());
cout << new_point2 << endl; //Quat [0, -1, 1.22465e-16, 1]
参考文献:http://en.wikipedia.org/wiki/Quaternion
OpenCV中国团队于2019年9月由深圳市人工智能与机器人研究院支持成立,非营利目的,致力于OpenCV的开发、维护和推广工作。
长按下方QR码关注我们获取最新动态



















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









