






本文内容转载自《微电子学》2019年第49卷第4期,版权归《微电子学》编辑部所有。
王亚林,杨拥军,任臣
中国电子科技集团公司第十三研究所
0 引言
MEMS陀螺仪是一种基于哥氏力效应的角速度传感器,具有低功耗、小体积、低成本、易集成等优点,被广泛应用于航空航天、汽车电子、机器人等领域。驱动电路是 MEMS 陀螺仪中重要的测控电路。它产生驱动信号来控制陀螺仪质量块稳定振动,同时为检测电路提供解调参考信号。传统的MEMS陀螺仪驱动电路采用开环结构,设计难度低,但具有一些固有缺陷,已被闭环结构的电路所取代。闭环驱动电路主要有模拟驱动和数字驱动两种实现方案。模拟闭环驱动电路全部采用模拟器件实现。但是,模拟器件的可靠性较差,精度较低,性能参数易受温度、老化等因素影响,导致驱动电路的稳定性和环境适应性较差,并且模拟电路不易实现先进的控制算法。数字驱动闭环电路将接口模拟信号转换为数字信号,在数字域实现驱动控制,可有效提高控制精度、稳定性、环境适应性等性能。目前,数字驱动电路多采用分立元件实现,如分立ADC芯片、FPGA、DSP等,导致MEMS陀螺仪的集成度降低,成本提高。
本文设计了一种数字驱动闭环专用集成电路(ASIC) ,实现了MEMS陀螺仪的高精度、集成式、数字化驱动。结合自激振荡原理,并采用自动增益控制(AGC)方法,在MATLAB/Simulink中建立了闭环电路系统模型。在此仿真模型的基础上,基于0.18μm CMOS工艺,设计了陀螺仪的驱动接口ASIC电路,包括电容/电压转换(C/V)电路、3阶带通Σ-Δ ADC等电路。最后,将ASIC芯片与MEMS陀螺仪键合封装为一个整体。测试结果表明,陀螺仪成功起振,并实现了设计目标,具有良好的性能。
1 MEMS陀螺仪的原理
1.1 陀螺仪工作原理
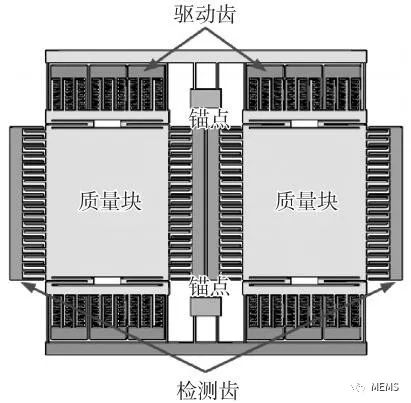
图1 双质量块谐振式陀螺仪的结构
本文研究的MEMS陀螺仪结构如图1所示。X轴方向为驱动模态,一定频率的外力作用于驱动梳齿,使MEMS陀螺仪质量块沿X轴机械振动。当Z轴方向有角速度输入时,质量块将产生Y轴方向的哥氏振动。根据哥氏振动的幅值可求解输入角速度。设驱动模态位移为:

式中,Ax为驱动模态的振动幅度,ωd为驱动力角频率。检测模态的动力学方程可表示为:

式中,y为检测模态的位移,m为检测模态的等效质量,cs为检测模态的阻尼系数,ks为检测模态的刚度系数,Fc为哥氏力,Ω为角速度,t为时间。
1.2 静电力驱动原理
图2给出了驱动梳齿的结构简化模型。图的中间为可动质量块,两边为固定的驱动电极。
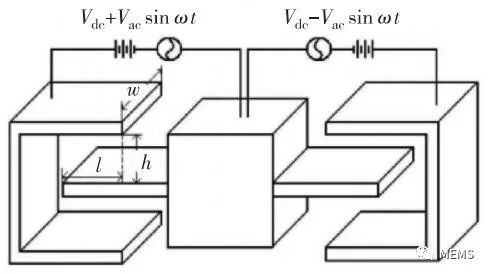
图2 驱动梳齿的结构简化模型
梳齿电容可表示为:

式中,ε0为介电常数,w为极板宽度,l为极板正对面长度,h为极板间高度。质量块受到的静电驱动力为极板间电容所贮存的电能梯度,表示为:

左右两侧施加驱动电压:

式中, Vdc为直流偏置电压, Vac为交流驱动电压,ω为驱动电压角频率。
若驱动极板的数量为2N,则中心质量块受到的合力为:
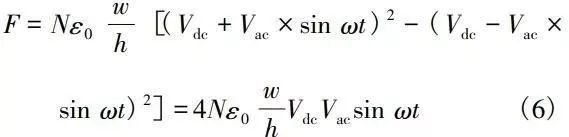
质量块在X轴方向受到的驱动静电力与驱动直流偏置电压和驱动交流偏置电压幅值的乘积成正比,其频率与驱动交流电压的频率相同。在驱动静电力的作用下,质量块在平衡位置附近作简谐振动。
2 闭环驱动系统设计
2.1 自激振荡
图3所示为典型的自激振荡系统。它是一个正反馈闭环控制系统。H(s)为前馈网络的传递函数,也是该反馈网络的开环传递函数。A(s)为反馈网络的传递函数,也称为反馈系数。自激振荡系统的起振条件为系统环路增益大于1,相位差为n×360°。
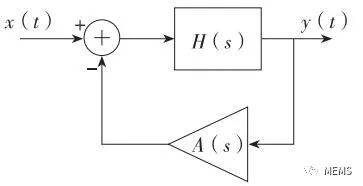
图3 自激振荡系统
2.2 自动增益控制
MEMS陀螺仪闭环驱动电路的结构如图4所示。在谐振频率点,MEMS陀螺仪的响应位移信号滞后于驱动力信号90°。对响应信号作+90°移相处理,使整个环路的相移为0°,满足谐振频率点发生自激振荡的相位条件。陀螺仪响应位移导致电容发生变化,经过C/V电路得到等效电压值,再经过均方根运算得到电压幅值。当陀螺仪振幅增大到接近期望值时,PI控制器自动调节驱动电压的幅值,实现驱动振幅的精确控制。
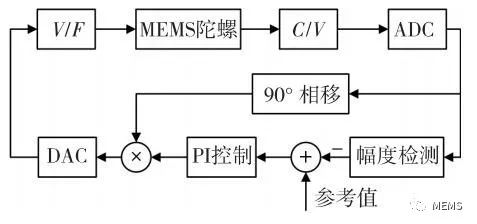
图4 陀螺仪闭环驱动电路的结构
MEMS陀螺仪驱动电路从起振到稳定的整个过程如图5(a)所示。在启动后220ms时,电路开始保持恒幅振荡。对驱动电路输出信号进行FFT变换,得到输出信号在频域内的分布,如图5(b)所示。结果表明,陀螺仪在谐振频率点成功起振。
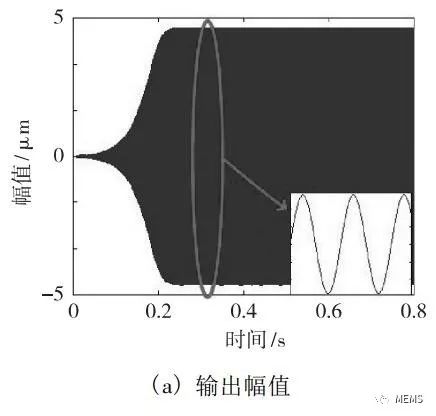
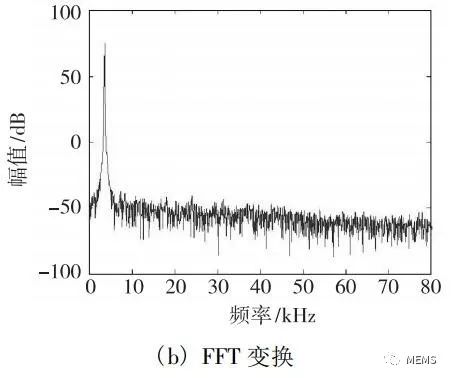
图5 闭环驱动电路的仿真结果
3 闭环驱动电路的设计
在驱动电路中,上电加载饱和直流驱动电压,由于噪声扰动,质量块开始振荡。C/V电路将质量块位移信号转换为电压信号,电压信号经过ADC转换为数字信号。后级处理单元均在数字域实现。相移模块前级电压信号精确移相90°,以抵消驱动力与位移之间的相位差,满足谐振条件。相位调整后,由幅值检测模块计算前级电压信号幅值,通过PI控制与参考电压比较后积分,得到动态变化的直流积分电压。将该直流电压叠加峰值检测前的交流信号作为驱动信号,完成正反馈自激振荡。C/V电路和ADC的性能将决定整个驱动电路的实现效果。
3.1 C/V电路
C/V电路将由外界加速度导致结构敏感单元所产生的差分电容变化转换成与其等效的电压值,为电路的后续工作作预先处理。C/V电路的结构如图6所示,Vm为方波电压信号,Vcom为共模反馈电压。
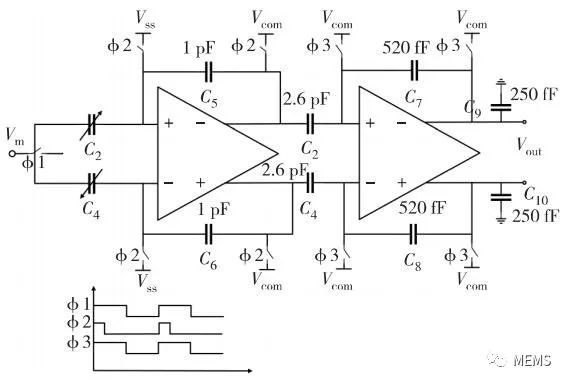
图6 C/V电路的结构
为了降低运放的失调电压和低频噪声,电路采用相关双采样(CDS)技术。通过对噪声和信号的两次测量,发现两次测量过程中的噪声相同,将两次测量结果相减来降低噪声。
3.2 Σ-Δ ADC
Σ-Δ ADC的结构如图7所示,采用3阶积分器级联多路前馈结构(CIFF)。ADC通过开关电容电路实现,采用CDS技术,降低了闪烁噪声和直流偏移。带通Σ-Δ ADC的中心频率为3.7kHz,带宽为200Hz,过采样比为512。
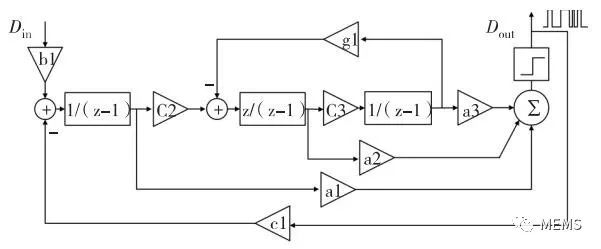
图7 Σ-Δ ADC的结构
积分器采用全差分结构,有效降低由时钟馈通以及电荷注入效应造成的误差,具有更大的输出摆幅。全差分结构的积分器如图8所示。
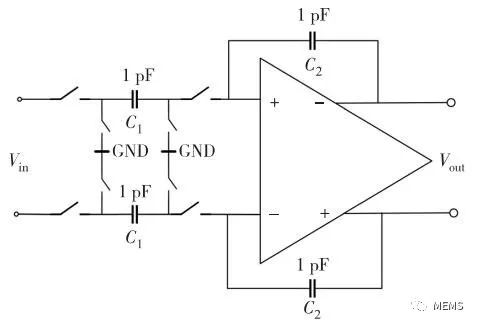
图8 开关电容积分器
为了实现差分结构的开关电容积分器,采用全差分结构的运算放大器(OTA) ,如图9所示。该OTA具有高电源抑制比、高增益、低噪声等优点。噪声的简化公式为:
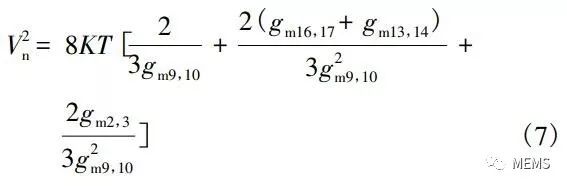
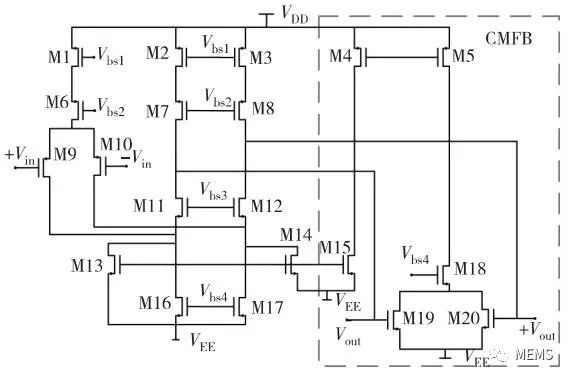
图9 全差分结构的OTA
为了降低运算放大器的热噪声,M9和M10管的宽度较大,而M2、M3、M13、M14、M16和M17管的跨导较小。对功耗、面积等性能进行折中考虑,设计了高压摆率、低噪声、低功耗的OTA。OTA中还包括一个共模反馈电路(CMFB) ,便于在输出端设置共模电压。前馈求和电路、量化器的结构分别如图10、图11所示。整个电路的版图如图12所示。
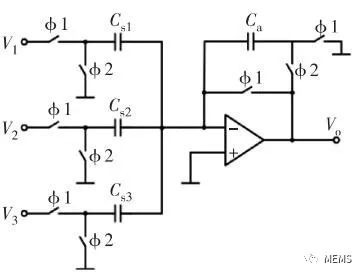
图10 前馈求和电路的结构
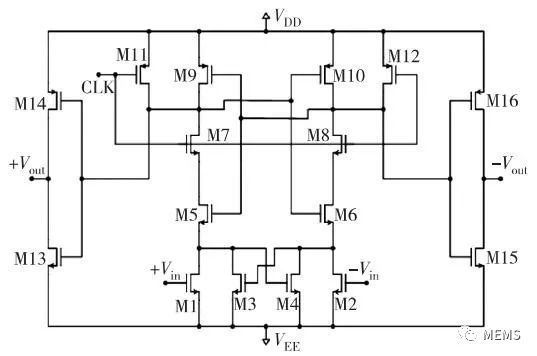
图11 量化器的结构
图12 ASIC的版图
4 测试结果
本文采用0.18μm CMOS工艺来设计与制作ASIC,并配合已有的MEMS陀螺仪进行测试。ASIC的输出结果如图13(a)所示,PSD输出如图13(b)所示。可以看出,上电后能够在0.3s内起振。陀螺仪输出的信噪比达到了115dB。整个芯片的功耗≤20mW。
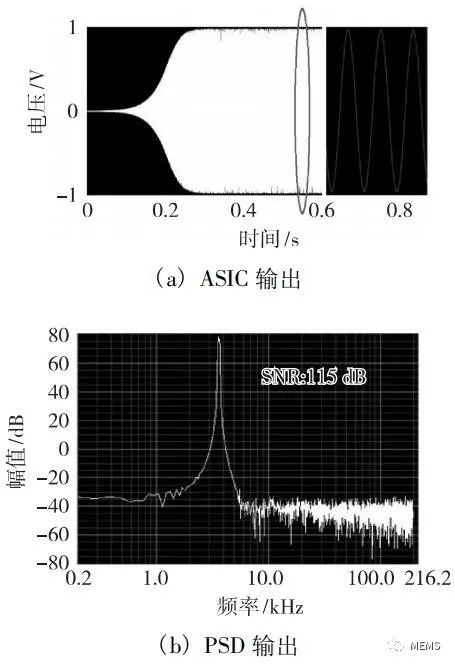
图13 测试结果
对MEMS陀螺仪进行1h上电测试,测试曲线如图14所示。
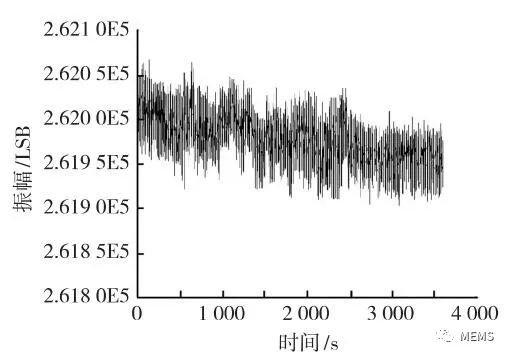
图14 MEMS陀螺仪在1h内的驱动振幅
根据测量的驱动振幅数据,计算得到MEMS陀螺仪在1h内的驱动振幅稳定性为1.5×10⁻⁴。
5 结论
本文设计了一种用于MEMS陀螺仪驱动闭环的ASIC。该闭环采用自激振荡原理,结合AGC方法实现了陀螺仪谐振。该ASIC中包括C/V电路、3阶带通Σ-Δ ADC等模块。测试结果表明,陀螺仪启动时间≤0.3s,输出信号信噪比达到115dB,1h内的驱动振幅稳定性为1.5×10⁻⁴,电路性能良好。
推荐培训:
《运动(惯性)传感器核心技术培训课程》将于11月15日~17日在无锡举行,本课程邀请MEMS领域优秀讲师和产业专家,重点讲解运动(惯性)传感器核心技术,包括:(1)运动传感器产业及应用综述;(2)MEMS惯性传感器技术及产业分析;(3)MEMS惯性传感器设计技术详解;(4)高精度MEMS加速度计技术详解;(5)工业级MEMS加速度计及应用:振动传感器;(6)MEMS高度计/气压传感器技术及产业分析;(7)MEMS惯性传感器系统特性分析;(8)运动传感器ASIC技术详解。如果您有兴趣,请联系:
麦姆斯咨询
联系人:赵婷婷
电话:18021192087
邮箱:ZHAOTingting@MEMSConsulting.com














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









