






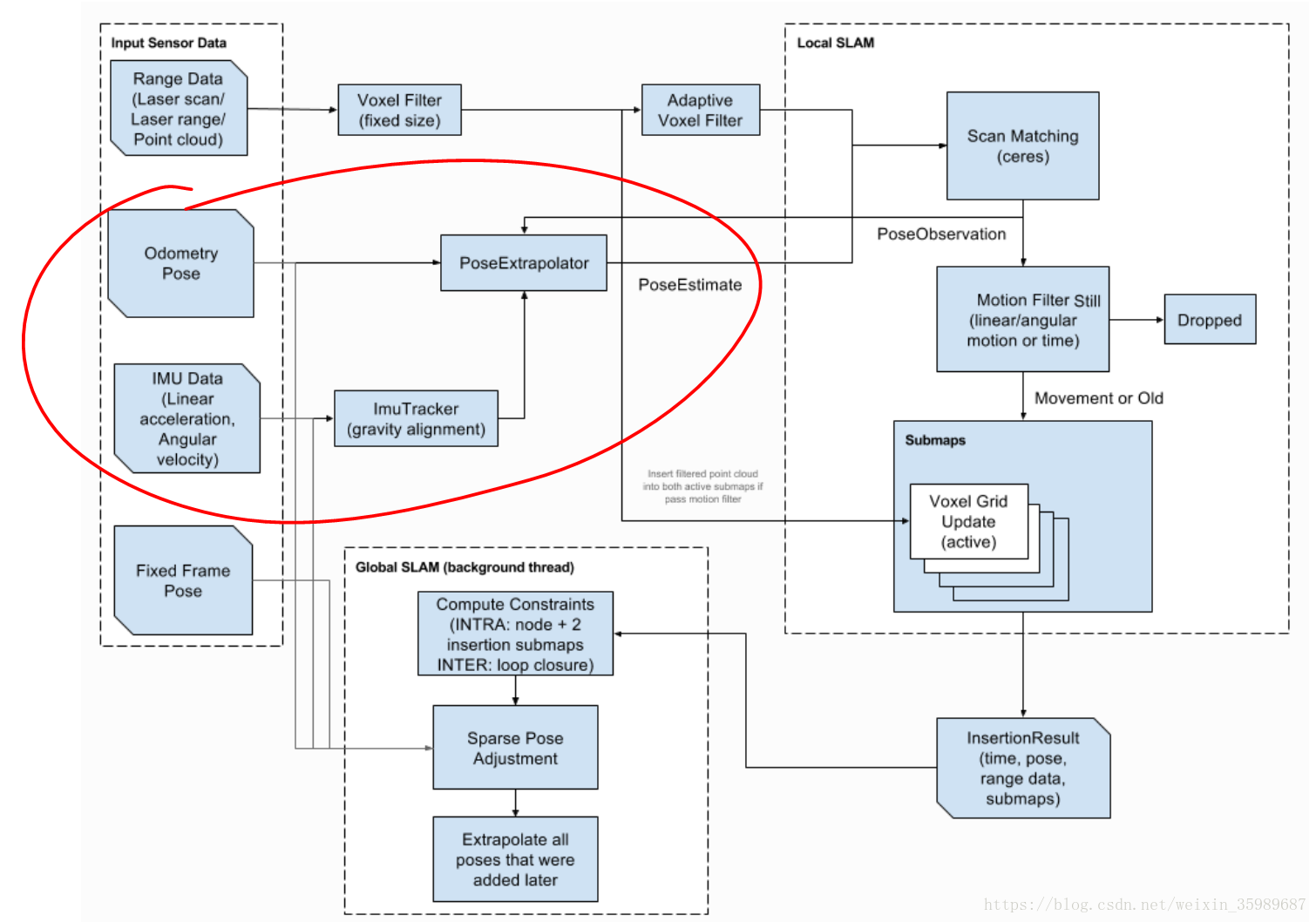
cartographer在扫描匹配阶段(Ceres 非线性优化)之前,使用 优化后的位姿、IMU、码盘 三个数据源进行融合,估计出最新时刻的位姿,用来作为下次非线性优化的初值。下面,针对这部分数据融合模块进行分析整理,如下图红圈部分。
cartographer/mapping/pose_extrapolator.cc中,
1数据源
AddPose中传入的pose,保存在timed_pose_queue_中
| ① | 获取最新优化的位姿并删除历史数据 |
| ② | 由最新优化的位姿解算出角速度和线速度(angular_velocity_from_poses_、linear_velocity_from_poses_) |
| ③ | 使用IMU数据进行姿态估计(imu_tracker_),并将此时估计出的姿态用于计算 码盘线速度 和最新估计姿态 的初值(odometry_imu_tracker_、extrapolation_imu_tracker_) |
| ④ | 删除最新优化的位姿时刻之前的码盘和IMU数据 |
AddImuData中传入的imu_data,保存在imu_data_中
| ① | 获取IMU数据 |
| ② | 删除 最新优化的位姿时刻 之前的IMU数据 |
AddOdometryData传入的odometry_data,保存在odometry_data_中
| ① | 获取码盘数据 |
| ② | 删除最新优化的位姿时刻之前的码盘数据 |
| ③ | 由码盘数据解算出角速度和线速度(angular_velocity_from_odometry_、linear_velocity_from_odometry_) |
2数据融合
| ExtrapolatePose | 使用码盘计算出的线速度进行位置估计,使用IMU计算出的角度增量进行姿态估计 | ||||||
| AdvanceImuTracker | 使用IMU的陀螺仪和加速度计进行姿态估计,估计方法是比较简单的互补滤波算法。用此函数进行的姿态估计共有三个,分别是 imu_tracker_、odometry_imu_tracker_和extrapolation_imu_tracker_
| ||||||
| ExtrapolatePose | 获取融合完成的位姿数据 |
| 总结: | 使用这种方法,对三个数据源做了严格的时间对齐,能够较为精确的获得估计后的位姿信息,用来作为后续非线性优化的初值。 |
旧版本UKF算法整理
在旧版本的CartoGrapher中,针对上述数据融合使用了UKF算法,整理如下。
GitHub - slam-code/cartographer: 关于谷歌slam地图库cartographer的源码注释
cartographer/kalman_filter/pose_tracker.cc中,
1数据源
| imu_tracker_ | 由IMU的加速度计和陀螺仪,使用简单的互补滤波方式解算出的姿态信息 |
| odometry_state_tracker_ | 使用两次相邻时刻的码盘增量来计算新位姿 |
| pose_observation | 在外部(kalman_local_trajectory_builder.cc)经过非线性优化后得到的位姿信息 |
2状态量
此算法使用的状态量为9维向量,如下:
三维位置(PX PY PZ)
三维姿态误差(OX OY OZ)
三维速度(VX VY VZ)
说明:三维姿态误差是指IMU解算的姿态和真实姿态之间的误差
3状态方程
状态方程在ModelFunction中做了定义:
PX(k+1)= PX(k)+ VX(k)* dt
PY(k+1)= PY(k)+ VY(k)* dt
PZ(k+1)= PZ(k)+ VZ(k)* dt
OX(k+1)= OX(k)
OY(k+1)= OY(k)
OZ(k+1)= OZ(k)
VX(k+1)= VX(k)
VY(k+1)= VY(k)
VZ(k+1)= VZ(k)
4观测方程
ZPx(k)= PX(k)
ZPy(k)= PY(k)
ZPz(k)= PZ(k)
Rz(k)= R(OX(k),OY(k),OZ(k))* Rimu(k)
为了便于计算,代码中将观测方程做了归零处理,即
0 = PX(k)- ZPx(k)
0 = PY(k)- ZPy(k)
0 = PZ(k)- ZPz(k)
Diag([1,1,1])= Rz-1(k)* R(OX(k),OY(k),OZ(k))* Rimu(k)
5数据融合
数据融合完全按照UKF的迭代方式:
| ① | Predict 通过状态方程不断进行状态预测,获得最新时刻的位姿估计; |
| ② | AddOdometerPoseObservation AddPoseObservation 当码盘或优化后的位姿数据到来时,则进行状态更新(注:单独的IMU数据到来,只进行预测、不进行更新); |
| ③ | GetPoseEstimateMeanAndCovariance 获取融合后的位姿信息 |
| 总结: | 使用这种方法,将IMU、码盘、优化后的位姿进行数据融合,得到一个较为精确的融合位姿数据。 相比最新代码中使用的融合方法,此UKF存在如下问题: ①三个数据源的时间戳对准做的不精细 ②IMU姿态融合过程完全依赖 码盘数据 或 优化后的位姿 的到来时刻一起做状态更新(AddPoseObservation),会引起比较大的姿态估计滞后 ③姿态估计时直接使用IMU互补滤波计算出的姿态,会引入累计误差 ④位置估计时主要使用两次相邻时刻码盘的位置增量,而不是由线速度计算,精度较差 ⑤UKF本身存在延迟且计算量过大 |














 4592
4592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









