







 PWM之MOS管推动PWM MOS管驱动实际是将PWM信号经过MOS进行功率放大,将PWM信号变成具备一定功率输出或有一定电流灌入能力的PWM波形。其常见的电路有PWM MOS管底边驱动,半桥输出、H桥输出和三相全桥输出。其具体应用有如下应用:PWM MOS管底边驱动:常见于斩波器(串励电机控制器)、反激式开关电源功率驱动、Boost升压电路、N型信号功率放大等各类电路中。半桥输出:常见于高频谐振...
PWM之MOS管推动PWM MOS管驱动实际是将PWM信号经过MOS进行功率放大,将PWM信号变成具备一定功率输出或有一定电流灌入能力的PWM波形。其常见的电路有PWM MOS管底边驱动,半桥输出、H桥输出和三相全桥输出。其具体应用有如下应用:PWM MOS管底边驱动:常见于斩波器(串励电机控制器)、反激式开关电源功率驱动、Boost升压电路、N型信号功率放大等各类电路中。半桥输出:常见于高频谐振...
PWM之MOS管推动
PWM MOS管驱动实际是将PWM信号经过MOS进行功率放大,将PWM信号变成具备一定功率输出或有一定电流灌入能力的PWM波形。其常见的电路有PWM MOS管底边驱动,半桥输出、H桥输出和三相全桥输出。
其具体应用有如下应用:
PWM MOS管底边驱动:常见于斩波器(串励电机控制器)、反激式开关电源功率驱动、Boost升压电路、N型信号功率放大等各类电路中。
半桥输出:常见于高频谐振电源电路、大功率电磁炉等
H桥:两个半桥构成一个H桥,常见于开关电源、高频焊机、大功率电磁炉、单相逆变器、有刷电机驱动等
三相全桥:常见在变频器、伺服驱动、无刷电机驱动等相关电机的驱动方面
根据以上我们做出以下常见电路:
PWMMOS管底边驱动:
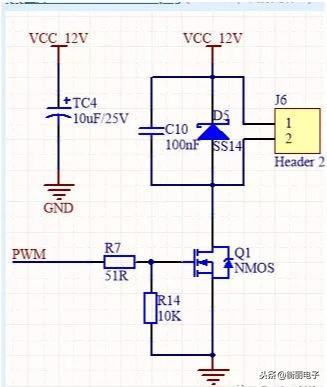
此电路中,PWM信号驱动Q1,Q1具备较强的光电流能力,此电路可以控制有刷电机单向旋转、可以驱动大功率继电器、LED、指示灯等相关负载。此电路中C10与D5构成灭弧电路,C10抑制Q1关断瞬间,J6第二脚的电压瞬间上升,通过C10,将此时刻的电压上升斜率降低,给D5二极管续流相应提供了一个反应时间。D5具备续流的作用,Q1关断后,负载电流不能瞬间消失,当J6 第二脚电压大于第1脚电压时,电流会
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1856
1856











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









